Download as pdf or txt
You might also like
- SM ECOSYS P3145dn P3150dn P3155dn-Rev.4Document289 pagesSM ECOSYS P3145dn P3150dn P3155dn-Rev.4ANDY100% (6)
- Chapter 7 and 8Document12 pagesChapter 7 and 8Amruta AvhaleNo ratings yet
- Radar For Object DetectionDocument12 pagesRadar For Object DetectionGUGULOTHU VENKATESH PRASAD B182380No ratings yet
- Chapter 7,8,9,10Document16 pagesChapter 7,8,9,10Amruta AvhaleNo ratings yet
- IoT Lab 2Document15 pagesIoT Lab 2Arshad KhanNo ratings yet
- Radar Arduino ProjectDocument17 pagesRadar Arduino ProjectDARSHAN KUDACHENo ratings yet
- Arduino Radar Source CodeDocument9 pagesArduino Radar Source CodeRushikesh PatilNo ratings yet
- Automatic RainDocument4 pagesAutomatic Rainmahidej823No ratings yet
- Experiment 2.1: 2. ObjectivesDocument18 pagesExperiment 2.1: 2. Objectivesdarshitsheth136No ratings yet
- Arduino Ultrasonic Radar ProjectDocument12 pagesArduino Ultrasonic Radar ProjecttihomihoNo ratings yet
- Expt 12Document4 pagesExpt 12M.SUBHEKSHANA THILAGANo ratings yet
- Radar ProjectDocument23 pagesRadar ProjectVarun KumarNo ratings yet
- Us 100 Ultrasonic Sensor ModuleDocument6 pagesUs 100 Ultrasonic Sensor ModuleArturo Hernandes100% (2)
- Automatic Bin Project Ase 365 - Google Docs - 034017Document12 pagesAutomatic Bin Project Ase 365 - Google Docs - 034017sylvestetagoseNo ratings yet
- 20BCS1029 Iot 5Document5 pages20BCS1029 Iot 5hustle bustleNo ratings yet
- Ece ReportDocument8 pagesEce ReportSharanya SinghNo ratings yet
- Working With Ultrasonic Sensor Using Arduino BoardDocument6 pagesWorking With Ultrasonic Sensor Using Arduino BoardDaniel Evans100% (2)
- Arduino LIDAR - Arduino Project HubDocument3 pagesArduino LIDAR - Arduino Project HubJosé Luis Zárate MoyaNo ratings yet
- Name: Aditya Branch: Ee ROLL NO.: 2004201Document7 pagesName: Aditya Branch: Ee ROLL NO.: 2004201Aditya SinghaniaNo ratings yet
- 1.4 Distance Measurement - UltrasonicSensor - RevisedDocument13 pages1.4 Distance Measurement - UltrasonicSensor - RevisedSayanNo ratings yet
- Experiment-2: Aim:Calculate The Distance To An Object With The Help of An Ultrasonic Sensor and ProcedureDocument5 pagesExperiment-2: Aim:Calculate The Distance To An Object With The Help of An Ultrasonic Sensor and ProceduremudireddyanilkumarreddyNo ratings yet
- Assignment 01 Objective: Blinking 2 LED in A Time IntervalDocument20 pagesAssignment 01 Objective: Blinking 2 LED in A Time IntervalSaurabh ChoudharyNo ratings yet
- Short Range Radar SystemDocument14 pagesShort Range Radar SystemHoomi ShbNo ratings yet
- Arduino and HC-SR04 Ultrasonic SensorDocument11 pagesArduino and HC-SR04 Ultrasonic SensorVarli ArsolNo ratings yet
- Ultrasonic Range Finder: Step 1: Parts ListDocument10 pagesUltrasonic Range Finder: Step 1: Parts ListKo Pyae SoneNo ratings yet
- Arduino Radar ProjectDocument10 pagesArduino Radar ProjectJesus Mamani100% (2)
- Department of Electronic Engineering: "Design of An Arduino Based Radar System"Document8 pagesDepartment of Electronic Engineering: "Design of An Arduino Based Radar System"Meer Zafarullah Noohani0% (1)
- Control Activity 5Document4 pagesControl Activity 5IvanNo ratings yet
- Programming: Obstacle Avoidance-ReferenceDocument10 pagesProgramming: Obstacle Avoidance-ReferenceBobby Ramos BadongenNo ratings yet
- Project Report On Automatic Railway GateDocument11 pagesProject Report On Automatic Railway Gatemohitsaha61974No ratings yet
- Automatic Railway GateDocument11 pagesAutomatic Railway GateSrijan AgrawalNo ratings yet
- Project 1Document24 pagesProject 1aeronautical rajasNo ratings yet
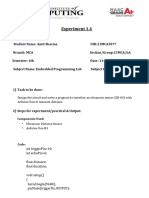
- 21MCA3077 - Amit Sharma - Worksheet 1.4Document4 pages21MCA3077 - Amit Sharma - Worksheet 1.4AMit SHarmaNo ratings yet
- R195328R Practical Report M2Document8 pagesR195328R Practical Report M2Chris M NcubeNo ratings yet
- IOT 3.1 - AlassoDocument4 pagesIOT 3.1 - AlassoKaushik Kumar jhaNo ratings yet
- A Project Report On: Submitted By: Nikhil PrasadDocument22 pagesA Project Report On: Submitted By: Nikhil Prasadradhey kumarNo ratings yet
- 05 Arduino Sensors, Motors and External InterruptsDocument20 pages05 Arduino Sensors, Motors and External InterruptsMalik Adil Farooq100% (2)
- GuidelinesTemplates For Lab WorksDocument38 pagesGuidelinesTemplates For Lab Worksdarya04yNo ratings yet
- Design and Fabrication of A Radar System Using Power PointDocument17 pagesDesign and Fabrication of A Radar System Using Power PointOyadare sarahNo ratings yet
- How To Make An Arduino Radar - HowToMechatronicsDocument11 pagesHow To Make An Arduino Radar - HowToMechatronicsYsaías Samanez VeraNo ratings yet
- "Bathroom Ventilation Fan": Design Laboratory No.5Document6 pages"Bathroom Ventilation Fan": Design Laboratory No.5Edwin Quinlat DevizaNo ratings yet
- Arduino Sanitizer Dispenser (Tinker Cad) : InstructablesDocument4 pagesArduino Sanitizer Dispenser (Tinker Cad) : InstructablesANISAH MOHAMAD NORDINNo ratings yet
- Intro To The Arduino: Topics: The Arduino Digital IO Analog IO Serial CommunicationDocument33 pagesIntro To The Arduino: Topics: The Arduino Digital IO Analog IO Serial CommunicationPrince GoenkaNo ratings yet
- Intruder Detection System Using Arduino Uno R3Document9 pagesIntruder Detection System Using Arduino Uno R3Saleh Ibne OmarNo ratings yet
- Esd PracticalDocument37 pagesEsd PracticalPurva SukhwalNo ratings yet
- Iot I WSN Sistemi Na Mikrokontrolerskim Razvojnim Platformama #1Document12 pagesIot I WSN Sistemi Na Mikrokontrolerskim Razvojnim Platformama #1ddobriloNo ratings yet
- Ultrasonic Sensor HC-SR04 and Arduino TutorialDocument5 pagesUltrasonic Sensor HC-SR04 and Arduino Tutorialmax100% (2)
- SMART WATER MANAGEMENT - Phase 3Document4 pagesSMART WATER MANAGEMENT - Phase 3azhagank28062003No ratings yet
- Adc ProgramsDocument5 pagesAdc Programsamareshgunda1404No ratings yet
- Yvonne C. Yee CPE-3C: Circuit DesignDocument4 pagesYvonne C. Yee CPE-3C: Circuit DesignGwyneth Cabelin YeeNo ratings yet
- Iot 2Document10 pagesIot 2Shruti PatelNo ratings yet
- Villanueva, Kyle Janssen MDocument4 pagesVillanueva, Kyle Janssen MKyle Janssen VillanuevaNo ratings yet
- SMART Dustbin Materials and Making of ItDocument9 pagesSMART Dustbin Materials and Making of ItAbdallaNo ratings yet
- COA Project ReportDocument14 pagesCOA Project ReportKirtan SolankiNo ratings yet
- Dayananda Sagar College of Engineering: Arduino Radar ProjectDocument13 pagesDayananda Sagar College of Engineering: Arduino Radar ProjectSiddharth JNo ratings yet
- IoT Based Water Level Indicator Using Ultrasonic SensorDocument11 pagesIoT Based Water Level Indicator Using Ultrasonic Sensorsri kanthNo ratings yet
- Job5 Iot Rani Mu'ArifahDocument9 pagesJob5 Iot Rani Mu'Arifah019Rani Mu'arifahNo ratings yet
- (QUICK START GUIDE) Set Up An Ultrasonic Range Finder On An ArduinoDocument7 pages(QUICK START GUIDE) Set Up An Ultrasonic Range Finder On An Arduinotharun sabinikariNo ratings yet
- 04 - RPi Pico - Measure Distance With Ultrasonic Sensor HC-SR04Document6 pages04 - RPi Pico - Measure Distance With Ultrasonic Sensor HC-SR04nuryadin2307No ratings yet
- Exploring Arduino: Tools and Techniques for Engineering WizardryFrom EverandExploring Arduino: Tools and Techniques for Engineering WizardryRating: 4.5 out of 5 stars4.5/5 (5)
- Interfaces For Nested Classes: Yannis Smaragdakis College of Computing Georgia Institute of Technology Atlanta, GA 30332Document9 pagesInterfaces For Nested Classes: Yannis Smaragdakis College of Computing Georgia Institute of Technology Atlanta, GA 30332Prajwal AtramNo ratings yet
- Arraylist Assignment GRN: 12011295 Name of The Student: Mayuresh .M .Kodape Roll No.: 52 Class: Sy-Etc Division: Et-B Batch: B3 Problem StatementDocument4 pagesArraylist Assignment GRN: 12011295 Name of The Student: Mayuresh .M .Kodape Roll No.: 52 Class: Sy-Etc Division: Et-B Batch: B3 Problem StatementPrajwal AtramNo ratings yet
- Stability of Java Interfaces: A Preliminary Investigation: Jonathan Chow Ewan TemperoDocument7 pagesStability of Java Interfaces: A Preliminary Investigation: Jonathan Chow Ewan TemperoPrajwal AtramNo ratings yet
- Designing Classes and Interfaces in Java: A Review: ISSN 2319 - 1953Document4 pagesDesigning Classes and Interfaces in Java: A Review: ISSN 2319 - 1953Prajwal AtramNo ratings yet
- An Inter-Classes Obfuscation Method For Java ProgramDocument6 pagesAn Inter-Classes Obfuscation Method For Java ProgramPrajwal AtramNo ratings yet
- Lab 4Document30 pagesLab 4Prajwal AtramNo ratings yet
- LAB 3: Serial Communication With Arduino: Name: Ashfan Khan Roll No:05 (Batch B1) PRN: 12011303Document5 pagesLAB 3: Serial Communication With Arduino: Name: Ashfan Khan Roll No:05 (Batch B1) PRN: 12011303Prajwal AtramNo ratings yet
- Introduction To Piezoelectric Pressure SensorsDocument4 pagesIntroduction To Piezoelectric Pressure SensorsSameh AhmedNo ratings yet
- Tutari Express Sleeper Class (SL)Document1 pageTutari Express Sleeper Class (SL)vaibhavNo ratings yet
- Low Power Quad Operational Amplifiers As324/324ADocument13 pagesLow Power Quad Operational Amplifiers As324/324APaulo ManuelNo ratings yet
- A252Document7 pagesA252Luz DuarteNo ratings yet
- Factor Analysis For Electric Guitar Data SheetDocument6 pagesFactor Analysis For Electric Guitar Data SheetSubhasis RahaNo ratings yet
- Project Report: Project Topic: Role of Prime Bank LTD On Encouraging EntrepreneursDocument2 pagesProject Report: Project Topic: Role of Prime Bank LTD On Encouraging EntrepreneursZahid Bin Islam100% (1)
- Word ProcessingDocument21 pagesWord ProcessingAlice Valiente100% (2)
- Developing A Sample Web Application Model For Material ManagementDocument7 pagesDeveloping A Sample Web Application Model For Material ManagementInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- FICCA COOL ProjectDocument1 pageFICCA COOL ProjectJim Lee ClimateViewerNo ratings yet
- Fireclass Overview Presentation PDFDocument34 pagesFireclass Overview Presentation PDFRamon Mendoza PantojaNo ratings yet
- CERPER - CE-5 Diplomatic TrainingDocument23 pagesCERPER - CE-5 Diplomatic TrainingExopolitika Magyarország100% (3)
- Dynamic Address Objects - RevbDocument12 pagesDynamic Address Objects - RevbChau NguyenNo ratings yet
- Opnet CsmacdDocument10 pagesOpnet Csmacddineshs519No ratings yet
- $SysAdm Made Easy 46cd (Entire Book-2002)Document781 pages$SysAdm Made Easy 46cd (Entire Book-2002)Avijit RoyNo ratings yet
- Mac OS 8 Install ManualDocument52 pagesMac OS 8 Install ManualscriNo ratings yet
- 18 DiplexorDocument3 pages18 DiplexorFernando GutiérrezNo ratings yet
- Literature ReviewDocument11 pagesLiterature ReviewAsif RahmanNo ratings yet
- Hazard Mapping Checklist-1Document1 pageHazard Mapping Checklist-1John Matthew CerenoNo ratings yet
- Higher Education Graduates by Discipline PDFDocument1 pageHigher Education Graduates by Discipline PDFRap SamsonNo ratings yet
- Coprative BankDocument4 pagesCoprative BankJasmandeep brarNo ratings yet
- HR Consulting EssentialsDocument25 pagesHR Consulting EssentialsBrianNo ratings yet
- Model P155: Stainless SteelDocument2 pagesModel P155: Stainless SteelJavi KatzNo ratings yet
- 32 Audio SystemDocument5 pages32 Audio SystemmeNo ratings yet
- Measuring Castable Rheology by Exothermic Profile PDFDocument7 pagesMeasuring Castable Rheology by Exothermic Profile PDFVinh Do ThanhNo ratings yet
- PC-PRO+ Advanced 9 00 Release NotesDocument8 pagesPC-PRO+ Advanced 9 00 Release NotesBruno De BridaNo ratings yet
- 02.GPM DPR L1 Product Format Documentation EDocument82 pages02.GPM DPR L1 Product Format Documentation EMaxi GarzonNo ratings yet
- Python ScientificDocument146 pagesPython Scientificpramod_vanamNo ratings yet
- Chapter 06 - WavesDocument9 pagesChapter 06 - WavesAl NazurisNo ratings yet
- Chapter II: Review of Related Literature and StudiesDocument9 pagesChapter II: Review of Related Literature and StudiesJamesAnthonyNo ratings yet