Download as pdf or txt
You might also like
- KCCQ 12 Scoring InstructionsDocument3 pagesKCCQ 12 Scoring Instructionsping fanNo ratings yet
- Differentiation of Self Inventory PDFDocument12 pagesDifferentiation of Self Inventory PDFCaulfield DariaNo ratings yet
- Pooja VashisthDocument40 pagesPooja VashisthApurva SinghNo ratings yet
- TRW Ross Steering Gears TAS40, TAS55, TAS65, TAS85 Service Manual-Parts Book TRW1108 PDFDocument78 pagesTRW Ross Steering Gears TAS40, TAS55, TAS65, TAS85 Service Manual-Parts Book TRW1108 PDFviemey1952100% (1)
- Problems On Mechanical SystemsDocument52 pagesProblems On Mechanical SystemsSheikameer Batcha83% (6)
- 1SDC200023D0204 - Emax2 enDocument306 pages1SDC200023D0204 - Emax2 enValéria CarraroNo ratings yet
- Linux Commands Cheat SheetDocument129 pagesLinux Commands Cheat SheetRakesh RakeeNo ratings yet
- Control Systems: University of Engineering & Technology LahoreDocument8 pagesControl Systems: University of Engineering & Technology LahoreAYESHA FAHEEMNo ratings yet
- Control Systems Presentation On Block Diagram AlgebraDocument6 pagesControl Systems Presentation On Block Diagram AlgebraSukanya SadhukhanNo ratings yet
- CSEXP2Document15 pagesCSEXP2Kavita DhamalNo ratings yet
- Block DiagramDocument20 pagesBlock DiagramabcdeNo ratings yet
- Lecture 2Document14 pagesLecture 2Abdullah Mohammed AlsaadouniNo ratings yet
- CIS Control Technology-Theory-Spring-2021Document6 pagesCIS Control Technology-Theory-Spring-2021mishal shakeelNo ratings yet
- DSD Module-2 Part-2Document59 pagesDSD Module-2 Part-2RajuNo ratings yet
- Computer Organisation and Architecture CoaDocument5 pagesComputer Organisation and Architecture Coaexamlab57No ratings yet
- ME 474 Syllabus 20211Document6 pagesME 474 Syllabus 20211aziz DeganiNo ratings yet
- 1 Class (04-02-2021) : 1. What Is Block Diagram? 2. What Is Summing Junction?Document25 pages1 Class (04-02-2021) : 1. What Is Block Diagram? 2. What Is Summing Junction?Md.Atikur RahmanNo ratings yet
- FBCS Lab Manual Fall 2019-1 PDFDocument71 pagesFBCS Lab Manual Fall 2019-1 PDFOsama MallickNo ratings yet
- EEF460 - Feedback Systems Laboratory OutlineDocument5 pagesEEF460 - Feedback Systems Laboratory OutlinePaterson NguepiNo ratings yet
- Mechatronics (2015) Unit IIDocument38 pagesMechatronics (2015) Unit IIkishan100% (1)
- Control System Analysis and Design: Karen WillcoxDocument12 pagesControl System Analysis and Design: Karen Willcoxkhannasir1No ratings yet
- Robustness Analysis For Rotorcraft Pilot Coupling With Helicopter Flight Control System in LoopDocument8 pagesRobustness Analysis For Rotorcraft Pilot Coupling With Helicopter Flight Control System in LoopMuhammad Mazhar BashirNo ratings yet
- CEP - LCS Spring 2022Document4 pagesCEP - LCS Spring 2022Muhammad ZeeshanNo ratings yet
- CS QBDocument14 pagesCS QBSanjana RoyyapallyNo ratings yet
- Week 1 - Introduction To Control SystemsDocument14 pagesWeek 1 - Introduction To Control SystemsHane MinasalbasNo ratings yet
- 3 - Block Diagram and Signal Flow GraphDocument55 pages3 - Block Diagram and Signal Flow GraphEyasu demsewNo ratings yet
- 1 Lecture Block Diagram Representation of Control SystemsDocument65 pages1 Lecture Block Diagram Representation of Control SystemsSuyash Dahake VlogsNo ratings yet
- Laboratory Manual: 15Ts704 Control Systems For MachinesDocument6 pagesLaboratory Manual: 15Ts704 Control Systems For Machinesjogi giridharNo ratings yet
- Automatic Control Engineering Computer/ Electronics/ MechatronicsDocument3 pagesAutomatic Control Engineering Computer/ Electronics/ Mechatronicsadel nabhanNo ratings yet
- Biological Control Systems: Biomedical Engineering - Bcs - Short Questions and AnswersDocument15 pagesBiological Control Systems: Biomedical Engineering - Bcs - Short Questions and AnswersNoor AhmedNo ratings yet
- Lecture1 F23Document29 pagesLecture1 F23201151No ratings yet
- Slide Set 15 - Software Testing TechniquesDocument55 pagesSlide Set 15 - Software Testing TechniquesAYUSH JAINNo ratings yet
- Labsheet2 ControlsystemDocument14 pagesLabsheet2 ControlsystemAina FarzanaNo ratings yet
- BTT306 - Ktu QbankDocument9 pagesBTT306 - Ktu QbankAnn JohnNo ratings yet
- Lab 5Document3 pagesLab 5Vu LeNo ratings yet
- Diseño-Guia 6 (PID Controller)Document8 pagesDiseño-Guia 6 (PID Controller)RhinometalI&CNo ratings yet
- CS LAB 12-Report-190469Document10 pagesCS LAB 12-Report-190469malik awaisNo ratings yet
- s6 Ei Pci May2014Document2 pagess6 Ei Pci May2014shilpa.1595No ratings yet
- 19152C22P Electrical Engg & Control SystemsDocument8 pages19152C22P Electrical Engg & Control Systemssoundharya ravichandranNo ratings yet
- Control SystemsDocument96 pagesControl SystemsDr. Gollapalli NareshNo ratings yet
- TE 2019 MechatronicsDocument6 pagesTE 2019 MechatronicsVishalNo ratings yet
- Control Manual Lab 12Document7 pagesControl Manual Lab 12Hussain HadiNo ratings yet
- Mocktest Set B (SOFTWARE ENGINEERING)Document5 pagesMocktest Set B (SOFTWARE ENGINEERING)Irfan NaufalNo ratings yet
- Scheme - I Sample Question PaperDocument4 pagesScheme - I Sample Question PaperYogesh Chaudhari100% (1)
- Lab Manual 8Document12 pagesLab Manual 8HasanNo ratings yet
- BlockDiagram and Signal Flow GraphsDocument29 pagesBlockDiagram and Signal Flow GraphsDienies TorresNo ratings yet
- CST206 Operating Systems, July 2021Document3 pagesCST206 Operating Systems, July 2021Althaf AsharafNo ratings yet
- Automatic Control For Mechanical EngineersDocument176 pagesAutomatic Control For Mechanical EngineersJuanV VeraNo ratings yet
- Experiment No. 01 Introduction To System Representation and Observation Using MATLABDocument20 pagesExperiment No. 01 Introduction To System Representation and Observation Using MATLABRakayet RafiNo ratings yet
- System Control: 1st Half of Semester Dept. of Mechanical EngineeringDocument94 pagesSystem Control: 1st Half of Semester Dept. of Mechanical Engineeringفحرلرز دیمسNo ratings yet
- Project Report Designing Position Control System: Abu Dhabi UniversityDocument13 pagesProject Report Designing Position Control System: Abu Dhabi UniversityMohammed ShifulNo ratings yet
- Analog Control - 1st LabDocument18 pagesAnalog Control - 1st LabMohammad alhaboob2030No ratings yet
- AutomaticControlforMechanicalEngineersByM GalalRabieoptDocument176 pagesAutomaticControlforMechanicalEngineersByM GalalRabieoptHectorVasquezLaraNo ratings yet
- UG11T2702 Advanced Marine Control Engg & AutomationDocument3 pagesUG11T2702 Advanced Marine Control Engg & AutomationSrinivasan PrakashNo ratings yet
- M Galal Rabie, Automatic Control For Mechanical Engineers, Cairo, ISBN 977-17-9869-3, 2010Document182 pagesM Galal Rabie, Automatic Control For Mechanical Engineers, Cairo, ISBN 977-17-9869-3, 2010Galal RabieNo ratings yet
- ME2620 Module 1 HandoutDocument15 pagesME2620 Module 1 HandoutJoshua EgallaNo ratings yet
- Design of Milling Machine Control System Based On Root Locus MethodDocument4 pagesDesign of Milling Machine Control System Based On Root Locus Methodmuhammad bilalNo ratings yet
- Automatic Control For Mechanical Engineers by M. Galal Rabie - OptDocument176 pagesAutomatic Control For Mechanical Engineers by M. Galal Rabie - OptSusan LamNo ratings yet
- Lab Report 3 To Measure Time-Domain Performance of The System and The Effect of Disturbance in A Closed-Loop Control System Using LabviewDocument9 pagesLab Report 3 To Measure Time-Domain Performance of The System and The Effect of Disturbance in A Closed-Loop Control System Using LabviewtayyabNo ratings yet
- Software Testing Techniques: Organized & Presented By: Software Engineering Team CSED TIET, PatialaDocument55 pagesSoftware Testing Techniques: Organized & Presented By: Software Engineering Team CSED TIET, Patialarajinder sahniNo ratings yet
- MCB3013 Control System Review of Mathematical FoundationDocument9 pagesMCB3013 Control System Review of Mathematical FoundationNasrullah YusupNo ratings yet
- 2 MarksDocument5 pages2 MarksPriya DharshiniNo ratings yet
- Advanced Techniques and Technology of Computer-Aided Feedback ControlFrom EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlNo ratings yet
- Analog and Hybrid Computing: The Commonwealth and International Library: Electrical Engineering DivisionFrom EverandAnalog and Hybrid Computing: The Commonwealth and International Library: Electrical Engineering DivisionRating: 1 out of 5 stars1/5 (1)
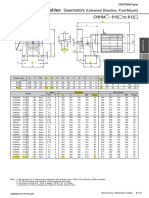
- Motoreductor CNHM8-6125-15 PDFDocument1 pageMotoreductor CNHM8-6125-15 PDFIH MedranoNo ratings yet
- Seeing and Feeling: A Comparison of Van Gogh and CezanneDocument8 pagesSeeing and Feeling: A Comparison of Van Gogh and CezanneAlli CampbellNo ratings yet
- The Paper 114 PDFDocument32 pagesThe Paper 114 PDFeu mesmoNo ratings yet
- CM160 - User Guide - ENDocument46 pagesCM160 - User Guide - ENdahvsatNo ratings yet
- Antena WindomDocument17 pagesAntena WindomJack RodriguezNo ratings yet
- Transformers Accessories and Support EquipmentDocument44 pagesTransformers Accessories and Support Equipmenthajimak100% (2)
- Huawei Amb4521r0 244Document1 pageHuawei Amb4521r0 244Fabio RosaneroNo ratings yet
- Concrete Embedment Strain Gauges: 4200 SeriesDocument2 pagesConcrete Embedment Strain Gauges: 4200 SeriesJosé GomesNo ratings yet
- Hyponatremia in Cirrhosis: Pathogenesis, Clinical Significance, and ManagementDocument48 pagesHyponatremia in Cirrhosis: Pathogenesis, Clinical Significance, and ManagementrlagamNo ratings yet
- DBMS Viva QuestionsDocument4 pagesDBMS Viva Questionssavitha ramuNo ratings yet
- The Adjustment Instructions of The Control Parameters of The Fardriver ControllerDocument6 pagesThe Adjustment Instructions of The Control Parameters of The Fardriver ControllerTips Trik TechnologyNo ratings yet
- Chapter 06 Pressure Losses in The Circulating SystemDocument22 pagesChapter 06 Pressure Losses in The Circulating SystemAbrar HassanNo ratings yet
- Solar Energy Storage MethodDocument11 pagesSolar Energy Storage MethodĐặng HuyNo ratings yet
- Eps Mma Tig en PDFDocument18 pagesEps Mma Tig en PDFAdrian EftimieNo ratings yet
- AMLTM.00.016-00-Iss1 Scratch ResistanceDocument4 pagesAMLTM.00.016-00-Iss1 Scratch ResistancealbertoNo ratings yet
- SE Modbus Basic Nodes User ManualDocument68 pagesSE Modbus Basic Nodes User ManualAlejandro RoalcabaNo ratings yet
- Lab Bio462 - Experiment 6Document4 pagesLab Bio462 - Experiment 6BalqishNo ratings yet
- Inplant Training: Diploma in Civil Engineering ProgrammeDocument42 pagesInplant Training: Diploma in Civil Engineering ProgrammeANUSHA DS0% (1)
- Grade 8 Ratio JournalDocument45 pagesGrade 8 Ratio JournalZunairah AdnanNo ratings yet
- Apelem Kristal X-Ray Table - User Manual PDFDocument42 pagesApelem Kristal X-Ray Table - User Manual PDFArish MalikNo ratings yet
- ABB Machinery Drives: ACS850 0.37 To 560 KW / 0.5 To 700 HP CatalogDocument24 pagesABB Machinery Drives: ACS850 0.37 To 560 KW / 0.5 To 700 HP CatalogHoang Bao ThaiNo ratings yet
- Apxvf18 C A20Document2 pagesApxvf18 C A20JCARLOS COLQUENo ratings yet
- Periodicity Review SL KeyDocument4 pagesPeriodicity Review SL KeyYeyoung ParkNo ratings yet
- ED Multiple Choice QuestionsDocument7 pagesED Multiple Choice QuestionsLaxmireddy Peram43% (7)
- Lecture-2 Unit ConsistencyDocument37 pagesLecture-2 Unit ConsistencyHashir FurhanNo ratings yet