Download as pdf or txt
You might also like
- 4024 Mock-2 Paper-1 2022-23Document22 pages4024 Mock-2 Paper-1 2022-23niloyNo ratings yet
- Practical Refraction EnglishDocument56 pagesPractical Refraction Englisherin100% (3)
- Electric Field in Material Space: Convection and Conduction CurrentsDocument25 pagesElectric Field in Material Space: Convection and Conduction CurrentsHassan Al BaityNo ratings yet
- Lug Analysis - MechaniCalcDocument26 pagesLug Analysis - MechaniCalcgbscribd73No ratings yet
- Super 30 Entrance Examination Sample PaperDocument9 pagesSuper 30 Entrance Examination Sample PaperRohit Raj77% (56)
- Synchronous Motors PDFDocument26 pagesSynchronous Motors PDFscribdtest69No ratings yet
- A Synchronous MotorDocument9 pagesA Synchronous MotorOmed OthmanNo ratings yet
- Experiment 7 Synchronous Motor V-CurvesDocument12 pagesExperiment 7 Synchronous Motor V-Curvesshukla_shrishNo ratings yet
- EM-II Lab 4Document4 pagesEM-II Lab 4Subhash KumarNo ratings yet
- Unit 7 Synchronous Motor: StructureDocument21 pagesUnit 7 Synchronous Motor: StructurePrasad YadavNo ratings yet
- DC Brush Motor TheoryDocument7 pagesDC Brush Motor Theoryjfsmenezes4534No ratings yet
- DcmotorsDocument16 pagesDcmotorskaran113No ratings yet
- V and Inverted V Curves of Synchronous MotorDocument4 pagesV and Inverted V Curves of Synchronous MotorPrakash ArumugamNo ratings yet
- Chapter 6 - Induction Motors (Part1)Document18 pagesChapter 6 - Induction Motors (Part1)SanjanaLakshmiNo ratings yet
- EDT Braking of AC DrivesDocument6 pagesEDT Braking of AC DrivesnikkipatelyyNo ratings yet
- Operating Characteristics of Synchronous MachineDocument9 pagesOperating Characteristics of Synchronous Machinekitchu007No ratings yet
- V CurveDocument6 pagesV CurveKunalNo ratings yet
- Induction Motor BrakingDocument7 pagesInduction Motor BrakingJM4 - ANo ratings yet
- CH 38synchronous Motor1 PDFDocument46 pagesCH 38synchronous Motor1 PDFWidia AstutiNo ratings yet
- Chapter 6-Part1and2-EEE301Document28 pagesChapter 6-Part1and2-EEE301DilekNo ratings yet
- Synchronous MotorsDocument9 pagesSynchronous MotorsAndreea CoZmaNo ratings yet
- Chapter 5 PDFDocument45 pagesChapter 5 PDFAnnieNo ratings yet
- Operating Characteristics of Synchronous MachineDocument8 pagesOperating Characteristics of Synchronous MachineGideon MoyoNo ratings yet
- Operating Characteristics of Synchronous MachineDocument8 pagesOperating Characteristics of Synchronous Machinekitchu007No ratings yet
- Characteristics of Synchronous MotorDocument8 pagesCharacteristics of Synchronous Motormelvin westNo ratings yet
- Unit 2 Co2Document12 pagesUnit 2 Co2Gokul anandNo ratings yet
- Synchronous Motors: Compensator. It Behaves As A Variable Capacitor When The Field IsDocument11 pagesSynchronous Motors: Compensator. It Behaves As A Variable Capacitor When The Field Ispriyanka2711_dubeyNo ratings yet
- Ac PDFDocument15 pagesAc PDFJarah GutierrezNo ratings yet
- Kreatryx Koncept Pock PDFDocument8 pagesKreatryx Koncept Pock PDFTechnical boxNo ratings yet
- Induction Motor Braking - Regenerative, Plugging &+ PDFDocument8 pagesInduction Motor Braking - Regenerative, Plugging &+ PDFTechnical boxNo ratings yet
- Motor OkDocument31 pagesMotor OkMain PrimeNo ratings yet
- The Equivalent Circuit and Torque of Three-Phase Induction MotorDocument11 pagesThe Equivalent Circuit and Torque of Three-Phase Induction Motorعمر تاليونNo ratings yet
- Chapter 6 - Synchronous Motors PDFDocument23 pagesChapter 6 - Synchronous Motors PDFYousab CreatorNo ratings yet
- Chapter 6 - Synchronous Motors PDFDocument23 pagesChapter 6 - Synchronous Motors PDFAmmar SafwtNo ratings yet
- Electrical Machines Final AssignmentDocument13 pagesElectrical Machines Final Assignmentaamir.faiazNo ratings yet
- Regenerative Braking of Induction MotorDocument27 pagesRegenerative Braking of Induction MotorcoolkannaNo ratings yet
- EM-3 Unit-4 UpdatedDocument22 pagesEM-3 Unit-4 UpdatedPrathap VuyyuruNo ratings yet
- Induction Motor Braking Regenerative Plugging Dynamic Braking of Induction MotorDocument9 pagesInduction Motor Braking Regenerative Plugging Dynamic Braking of Induction MotorRajeev ValunjkarNo ratings yet
- Method of Starting: Still Continues To Run Synchronously. The Value of This Load Angle or Coupling Angle (As It IsDocument2 pagesMethod of Starting: Still Continues To Run Synchronously. The Value of This Load Angle or Coupling Angle (As It IsJezeth Vince MacaspacNo ratings yet
- Module V Synchronous MotorsDocument21 pagesModule V Synchronous Motorsyanith kumarNo ratings yet
- Synchronous MotorsDocument11 pagesSynchronous MotorsSanjay GhoshNo ratings yet
- A Compound DC Motor Carries Both A Series Field and A Shunt FieldDocument6 pagesA Compound DC Motor Carries Both A Series Field and A Shunt Fieldsiddiq85No ratings yet
- Chapter 7-Induction Motors Part1 PDFDocument18 pagesChapter 7-Induction Motors Part1 PDFMohammadrezaÖztürkNo ratings yet
- EM2 - Final - Lecture 06ADocument16 pagesEM2 - Final - Lecture 06AShoaib KhanNo ratings yet
- ELEN 30083 Electrical Machines 1: Prepared byDocument47 pagesELEN 30083 Electrical Machines 1: Prepared byJheromeNo ratings yet
- EquivalEquivalent Circuit of Single-Phase Induction Motorent Circuit of Single-Phase Induction MotorDocument13 pagesEquivalEquivalent Circuit of Single-Phase Induction Motorent Circuit of Single-Phase Induction Motoraili_avinashNo ratings yet
- Unit 5 FinalDocument10 pagesUnit 5 FinaljayababNo ratings yet
- EM 2 - Unit 4Document62 pagesEM 2 - Unit 4Black DiamoondNo ratings yet
- 3.b. D.C. Motors: Construction and Working of DC Motor ElectricalDocument5 pages3.b. D.C. Motors: Construction and Working of DC Motor ElectricalJB 1922No ratings yet
- Starting and Braking of Induction MotorDocument15 pagesStarting and Braking of Induction MotorSOURABH MONGRANo ratings yet
- Synch Alternator Exp6Document8 pagesSynch Alternator Exp6Prìyañshú GuptãNo ratings yet
- ECEN 441-504: Electronic Motor Drive: Lab 3: Operating Characteristics of The Separately Excited DC MotorDocument6 pagesECEN 441-504: Electronic Motor Drive: Lab 3: Operating Characteristics of The Separately Excited DC Motorapi-241454978No ratings yet
- Synchronous Motor: Instructor: Prof. Dr. Md. Mortuza Ali Contact: 01717137863 Office: EEE Dept., RUETDocument31 pagesSynchronous Motor: Instructor: Prof. Dr. Md. Mortuza Ali Contact: 01717137863 Office: EEE Dept., RUETHimelNo ratings yet
- DC Motors: 2.0 ObjectivesDocument16 pagesDC Motors: 2.0 ObjectivesBelayet RonyNo ratings yet
- DC MotorsDocument33 pagesDC MotorsVikram SanthoshNo ratings yet
- Chapter 5Document34 pagesChapter 5Jayshon Montemayor100% (1)
- Three Phase Synchronous MachinesDocument14 pagesThree Phase Synchronous MachinesMohdFirdausNo ratings yet
- Lab 07 - DC MotorsDocument9 pagesLab 07 - DC MotorsChamila SumathiratnaNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- ACFrOgDeyJb3Yf-evzfrG2IVljKRq8wANEHA2O5jz7Zpiu_yeOANIxNALnWs2Qaiykq-SsUSewtKeNW6XDY2ics8GKq8qr8lGDLyY6_Vg2WUVqFMa3BQ7BY19cb0IgVfqWRS8opqLjhHgeEiz_cTDocument30 pagesACFrOgDeyJb3Yf-evzfrG2IVljKRq8wANEHA2O5jz7Zpiu_yeOANIxNALnWs2Qaiykq-SsUSewtKeNW6XDY2ics8GKq8qr8lGDLyY6_Vg2WUVqFMa3BQ7BY19cb0IgVfqWRS8opqLjhHgeEiz_cTHassan Al BaityNo ratings yet
- [Behzad] Design of Analog CMOS Integrated C(BookFi)Document329 pages[Behzad] Design of Analog CMOS Integrated C(BookFi)Hassan Al BaityNo ratings yet
- ECE 2100 LSN 33 1st Order Circuits 1Document26 pagesECE 2100 LSN 33 1st Order Circuits 1Hassan Al BaityNo ratings yet
- Acfrogagquvb5wgjv3qo 7n039hig3md3j Z19rlaljhoajzthi7ssppmox7qtzkkdmbr Jt9g9co8g21d Zt2ygw Cs1ekeixurxb1xrdojcjifzhlp01x5ggvc P3jjkx5kzd9ncw4babsk2weDocument19 pagesAcfrogagquvb5wgjv3qo 7n039hig3md3j Z19rlaljhoajzthi7ssppmox7qtzkkdmbr Jt9g9co8g21d Zt2ygw Cs1ekeixurxb1xrdojcjifzhlp01x5ggvc P3jjkx5kzd9ncw4babsk2weHassan Al BaityNo ratings yet
- Bus Timing:: ̅̅̅̅̅) To ̅ 0 For The 8088 and / ̅̅̅ 1 For The 8086. If Data Are ReadDocument6 pagesBus Timing:: ̅̅̅̅̅) To ̅ 0 For The 8088 and / ̅̅̅ 1 For The 8086. If Data Are ReadHassan Al BaityNo ratings yet
- Solve Logarithmic EquationsDocument3 pagesSolve Logarithmic EquationsHassan Al BaityNo ratings yet
- Diffrerential Amp. Tut.Document56 pagesDiffrerential Amp. Tut.Hassan Al BaityNo ratings yet
- SummaryDocument3 pagesSummaryHassan Al BaityNo ratings yet
- ! 41N Lip F': of ./I"I (S, L I E (F.'. Pcrl/. FQ L O"GumDocument10 pages! 41N Lip F': of ./I"I (S, L I E (F.'. Pcrl/. FQ L O"GumHassan Al BaityNo ratings yet
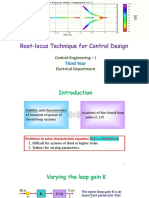
- Root-Locus Technique For Control Design: Third YearDocument48 pagesRoot-Locus Technique For Control Design: Third YearHassan Al BaityNo ratings yet
- EMII - Lecture 18 - Induction MachinesDocument14 pagesEMII - Lecture 18 - Induction MachinesHassan Al BaityNo ratings yet
- USCO CatalogDocument56 pagesUSCO CatalogDavid LeviNo ratings yet
- Flora Dale Senior Sec. School SYLLABUS (2020 - 21) Term - 1 (May - October) Class - XiDocument5 pagesFlora Dale Senior Sec. School SYLLABUS (2020 - 21) Term - 1 (May - October) Class - Xis KUMARNo ratings yet
- P-T-X PbTe-PbSe (Sealy1973)Document7 pagesP-T-X PbTe-PbSe (Sealy1973)Mike PoznerNo ratings yet
- 220 KV Grid Substation AlwarDocument62 pages220 KV Grid Substation AlwarSunnyjai Kukreja50% (2)
- Science-RAFT ExampleDocument4 pagesScience-RAFT ExampleGeetha RangarajanNo ratings yet
- Schedule - JEE Advanced Crash Course 2024Document2 pagesSchedule - JEE Advanced Crash Course 2024saurav.saha1984No ratings yet
- Zps Stock 230109Document4 pagesZps Stock 230109Insaat MakineleriNo ratings yet
- CHP 18 Transition Metals (E)Document6 pagesCHP 18 Transition Metals (E)Khe ManshuNo ratings yet
- A Review On A Gear Tooth Failure AnalysisDocument13 pagesA Review On A Gear Tooth Failure AnalysisKKDhNo ratings yet
- 096 09247 03 - TDSDocument2 pages096 09247 03 - TDSMuhamad Samsul BahriNo ratings yet
- HVAC Solution Help FileDocument291 pagesHVAC Solution Help FileInventor SolidworksNo ratings yet
- Ring FoundationDocument4 pagesRing Foundationjorge01100% (2)
- Chapter - 15 A Level Physics WB MSDocument4 pagesChapter - 15 A Level Physics WB MSmichelle winataNo ratings yet
- Corrosion Fatigue Crack Growth Studies On Pressure PDFDocument6 pagesCorrosion Fatigue Crack Growth Studies On Pressure PDFMarco AntonioNo ratings yet
- Studies in Plain Bearing Failures - TLT Article - Oct06Document4 pagesStudies in Plain Bearing Failures - TLT Article - Oct06safat parNo ratings yet
- IISER Syllabus: MathematicsDocument3 pagesIISER Syllabus: MathematicsIIT aspNo ratings yet
- WR Pump 2-1 & 2-2Document1 pageWR Pump 2-1 & 2-2Bhuneshwar ChelakNo ratings yet
- Tio2mesh Flyer A4 4seitig Englisch 2016-09Document2 pagesTio2mesh Flyer A4 4seitig Englisch 2016-09Erik CanosNo ratings yet
- Contributed Papers: Cordoba Spain 13-17 March 2000Document448 pagesContributed Papers: Cordoba Spain 13-17 March 2000remikhaledNo ratings yet
- HYGECO - Notice SB 0MAN052 H - ENGDocument20 pagesHYGECO - Notice SB 0MAN052 H - ENGmarius tothNo ratings yet
- National Advisory Committee - For Aeronautics: Technical Note No: 1293Document56 pagesNational Advisory Committee - For Aeronautics: Technical Note No: 1293manuelq9No ratings yet
- Chapter 12 SolutionsDocument3 pagesChapter 12 SolutionsrajatNo ratings yet
- O Level Physics Text BookDocument111 pagesO Level Physics Text BookMatabaro BenjaminNo ratings yet
- Fourier Series Note5Document13 pagesFourier Series Note52133MANAS PARABNo ratings yet
- Tomacorriente Legrand Grado HospitalarioDocument2 pagesTomacorriente Legrand Grado HospitalarioAlfrhNo ratings yet
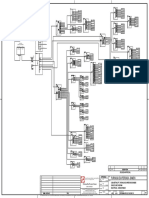
- Pepbwn 001 Elc SLD 001.0 - Singel Line Diargram (New Expanse)Document1 pagePepbwn 001 Elc SLD 001.0 - Singel Line Diargram (New Expanse)Rian ArfanNo ratings yet


































































![[Behzad] Design of Analog CMOS Integrated C(BookFi)](https://imgv2-2-f.scribdassets.com/img/document/748598910/149x198/8d43e0a890/1720372963?v=1)