Download as pdf or txt
You might also like
- Wind Turbines - Protective Measures - Requirements For Design, Operation and MaintenanceDocument28 pagesWind Turbines - Protective Measures - Requirements For Design, Operation and Maintenancexcv100% (4)
- Electric Field in Material Space: Convection and Conduction CurrentsDocument25 pagesElectric Field in Material Space: Convection and Conduction CurrentsHassan Al BaityNo ratings yet
- Chapter4 Math Awalan Nota PDFDocument42 pagesChapter4 Math Awalan Nota PDFnurul nabilaNo ratings yet
- IM Phasor Diagram, NO Load and Blocked Rotor Test and Torque Slip CharacteristicDocument19 pagesIM Phasor Diagram, NO Load and Blocked Rotor Test and Torque Slip CharacteristicDEBADATTANo ratings yet
- EMII - Lecture 18 - Induction MachinesDocument14 pagesEMII - Lecture 18 - Induction MachinesHassan Al BaityNo ratings yet
- Induction GeneratorDocument61 pagesInduction Generatorayash mohantyNo ratings yet
- Dynamic Modelling of Induction Motor:: Class Notes - 4 Shabbar A. Vejlani (2009A3PS049G)Document7 pagesDynamic Modelling of Induction Motor:: Class Notes - 4 Shabbar A. Vejlani (2009A3PS049G)Savan RathodNo ratings yet
- Dynamic Modelling of Induction Motor:: Class Notes - 4 Shabbar A. Vejlani (2009A3PS049G)Document7 pagesDynamic Modelling of Induction Motor:: Class Notes - 4 Shabbar A. Vejlani (2009A3PS049G)Savan RathodNo ratings yet
- 21EE44-Module 3Document18 pages21EE44-Module 3AshwiniNo ratings yet
- Mod-3 ADocument19 pagesMod-3 Asagar sainiNo ratings yet
- TEP3 - DC MotorDocument34 pagesTEP3 - DC MotorAbror md FayiazNo ratings yet
- Tayade - 2014 - Modeling and Simulation of A BLDC Motor by Using Matlab Simulation ToolDocument8 pagesTayade - 2014 - Modeling and Simulation of A BLDC Motor by Using Matlab Simulation ToolmitulNo ratings yet
- Tugas Chapter2 System ParameterDocument18 pagesTugas Chapter2 System ParameterMuhammad Rizani RusliNo ratings yet
- Control Tutorial 4Document10 pagesControl Tutorial 4Andrew Emad KhalileNo ratings yet
- Mod3 PPT 14-29Document16 pagesMod3 PPT 14-29Mukul RanaNo ratings yet
- Electrical Engineering Workshop Practice Ii: Transformer ConstructionDocument37 pagesElectrical Engineering Workshop Practice Ii: Transformer Constructionaregawi weleabezgiNo ratings yet
- Ac 10Document22 pagesAc 10Ehmed BazNo ratings yet
- DC Motor Modeling and Controller DesignDocument26 pagesDC Motor Modeling and Controller DesignMauricio bonilla GarageNo ratings yet
- Slva 589Document12 pagesSlva 589Omar MohamedNo ratings yet
- 18ee53 Module 5Document33 pages18ee53 Module 5AshwiniNo ratings yet
- Wednesday, July 15, 2020 DC MotorDocument5 pagesWednesday, July 15, 2020 DC MotorRayhan TalukderNo ratings yet
- Induction Motor Modeling - Steady StateDocument43 pagesInduction Motor Modeling - Steady Statedivinelight100% (3)
- 3 PDFDocument17 pages3 PDFSilas StephenNo ratings yet
- Lab 13 - Wound Rotor Induction MotorDocument6 pagesLab 13 - Wound Rotor Induction MotorJeth MadriagaNo ratings yet
- Lecture Note em - CH 3 1588264018Document22 pagesLecture Note em - CH 3 1588264018Dr. Deepika YadavNo ratings yet
- Induction MachinesDocument81 pagesInduction Machinessandyarajagopalan321No ratings yet
- Torque Production On DC MachineDocument5 pagesTorque Production On DC MachineSudip PaulNo ratings yet
- Chapter ThreeDocument91 pagesChapter ThreeEthio Dangote TubeNo ratings yet
- Module 2Document26 pagesModule 2SohnNo ratings yet
- 电磁电机-4 直流有刷电机与驱动1.2Document30 pages电磁电机-4 直流有刷电机与驱动1.2Jiyuan JiaNo ratings yet
- DC MotorsDocument33 pagesDC MotorsVikram SanthoshNo ratings yet
- Bee Unit4 Lecture2Document7 pagesBee Unit4 Lecture2haiderNo ratings yet
- AC MotorDocument43 pagesAC MotorFranchesca Therese Caño EncisoNo ratings yet
- Power Systems AssignmentDocument12 pagesPower Systems AssignmentJbmulindwaNo ratings yet
- Ahmad ProjDocument11 pagesAhmad ProjSaifNo ratings yet
- Unit 2 - DC Machines (064-090)Document27 pagesUnit 2 - DC Machines (064-090)Salah AwniNo ratings yet
- Polyphase Induction Motor: Course MaterialDocument20 pagesPolyphase Induction Motor: Course MaterialBu DakNo ratings yet
- Speed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3Document10 pagesSpeed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3rohitkjNo ratings yet
- Ac Motors War-MebDocument10 pagesAc Motors War-MebolingxjcNo ratings yet
- Stability Slide 2Document46 pagesStability Slide 2iriseugeneNo ratings yet
- Introduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyDocument13 pagesIntroduction: The Induction Motor Is A Three Phase AC Motor and Is The Most WidelyAsimNo ratings yet
- Chapter-Three (II) DC MotorsDocument9 pagesChapter-Three (II) DC MotorsDawit LijalemNo ratings yet
- Lab - 13 - Performance Study of Single-Phase InverterDocument4 pagesLab - 13 - Performance Study of Single-Phase InverterhanokarrarNo ratings yet
- Chapter 7-Induction Motors Part1 PDFDocument18 pagesChapter 7-Induction Motors Part1 PDFMohammadrezaÖztürkNo ratings yet
- Practical: - 01: Aim: - Apparatus: - TheoryDocument3 pagesPractical: - 01: Aim: - Apparatus: - TheoryJay MonparaNo ratings yet
- 7-DC MachinesDocument3 pages7-DC Machinesmkmohkh4No ratings yet
- Induction Motors: The Concept of Rotor SlipDocument12 pagesInduction Motors: The Concept of Rotor Sliphafiz_jaaffarNo ratings yet
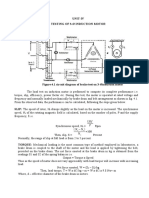
- Unit-Iv Testing of 3-Ø Induction MotorDocument12 pagesUnit-Iv Testing of 3-Ø Induction MotorAshok PNo ratings yet
- The Relationship Between Voltage and DC Motor Output SpeedDocument3 pagesThe Relationship Between Voltage and DC Motor Output SpeedVijayanandh RNo ratings yet
- Electrical Machines II: Week 8: Induction Motor Tests, Maximum Power, Maximum Torque and Maximum Efficiency CriterionDocument17 pagesElectrical Machines II: Week 8: Induction Motor Tests, Maximum Power, Maximum Torque and Maximum Efficiency CriterionmustafaalmusueNo ratings yet
- Induction MachineDocument48 pagesInduction MachinechethanNo ratings yet
- DC Motor Losses and EfficiencyDocument7 pagesDC Motor Losses and EfficiencyAbdelrhman Essam AttiaNo ratings yet
- Question Paper Bee Sem 1Document24 pagesQuestion Paper Bee Sem 1Roshan SuvarnaNo ratings yet
- Maximum Power: CriterionDocument2 pagesMaximum Power: CriterionĦøÐâNo ratings yet
- Magnetically Coupled Circuits-Lecture 2Document16 pagesMagnetically Coupled Circuits-Lecture 2YousefNo ratings yet
- DC MachinesDocument15 pagesDC MachinesParyul ChaudhariNo ratings yet
- 230 Power System Stability PDFDocument31 pages230 Power System Stability PDFBelayneh Tadesse100% (1)
- DC MotorDocument17 pagesDC MotorBijoy AyyagariNo ratings yet
- Earth Loop Impedance CalculationsDocument4 pagesEarth Loop Impedance Calculationsbcqbao100% (2)
- Easy(er) Electrical Principles for General Class Ham License (2015-2019)From EverandEasy(er) Electrical Principles for General Class Ham License (2015-2019)Rating: 5 out of 5 stars5/5 (1)
- ECE 2100 LSN 33 1st Order Circuits 1Document26 pagesECE 2100 LSN 33 1st Order Circuits 1Hassan Al BaityNo ratings yet
- Acfrogagquvb5wgjv3qo 7n039hig3md3j Z19rlaljhoajzthi7ssppmox7qtzkkdmbr Jt9g9co8g21d Zt2ygw Cs1ekeixurxb1xrdojcjifzhlp01x5ggvc P3jjkx5kzd9ncw4babsk2weDocument19 pagesAcfrogagquvb5wgjv3qo 7n039hig3md3j Z19rlaljhoajzthi7ssppmox7qtzkkdmbr Jt9g9co8g21d Zt2ygw Cs1ekeixurxb1xrdojcjifzhlp01x5ggvc P3jjkx5kzd9ncw4babsk2weHassan Al BaityNo ratings yet
- Bus Timing:: ̅̅̅̅̅) To ̅ 0 For The 8088 and / ̅̅̅ 1 For The 8086. If Data Are ReadDocument6 pagesBus Timing:: ̅̅̅̅̅) To ̅ 0 For The 8088 and / ̅̅̅ 1 For The 8086. If Data Are ReadHassan Al BaityNo ratings yet
- SummaryDocument3 pagesSummaryHassan Al BaityNo ratings yet
- Solve Logarithmic EquationsDocument3 pagesSolve Logarithmic EquationsHassan Al BaityNo ratings yet
- ! 41N Lip F': of ./I"I (S, L I E (F.'. Pcrl/. FQ L O"GumDocument10 pages! 41N Lip F': of ./I"I (S, L I E (F.'. Pcrl/. FQ L O"GumHassan Al BaityNo ratings yet
- Root-Locus Technique For Control Design: Third YearDocument48 pagesRoot-Locus Technique For Control Design: Third YearHassan Al BaityNo ratings yet
- Diffrerential Amp. Tut.Document56 pagesDiffrerential Amp. Tut.Hassan Al BaityNo ratings yet
- EMII - Lecture 18 - Induction MachinesDocument14 pagesEMII - Lecture 18 - Induction MachinesHassan Al BaityNo ratings yet
- EMII - Lecture 14 - Synchronous MachinesDocument10 pagesEMII - Lecture 14 - Synchronous MachinesHassan Al BaityNo ratings yet
- 6800&3800 Network Design Guide-ADocument53 pages6800&3800 Network Design Guide-AAlexander Pischulin100% (2)
- Bin Tariq Pipes Intro 2013Document61 pagesBin Tariq Pipes Intro 2013Munir Ahmed MusianiNo ratings yet
- Spaser Based On Fano Resonance in A Rod and Concentric Square Ring-Disk Nanostructure PDFDocument4 pagesSpaser Based On Fano Resonance in A Rod and Concentric Square Ring-Disk Nanostructure PDFEngr NasrullahNo ratings yet
- Organic ChemistryDocument7 pagesOrganic ChemistryRonNo ratings yet
- Chapter 18-Fundamentals of Metal FormingDocument33 pagesChapter 18-Fundamentals of Metal FormingMuhammad Qasim QureshiNo ratings yet
- 2022 - Bazli - Long-Span Timber Flooring SystemsDocument17 pages2022 - Bazli - Long-Span Timber Flooring SystemsThomas ManderNo ratings yet
- Gas Pressure Regulator RS 250 / RS 251: Product InformationDocument28 pagesGas Pressure Regulator RS 250 / RS 251: Product InformationAdilson Melo de MouraNo ratings yet
- Acid Catalysis by Heteropolyacids: Transformations of AlkanesDocument13 pagesAcid Catalysis by Heteropolyacids: Transformations of Alkanes20210311098 Febry Dwi LestariNo ratings yet
- Classification of MatterDocument57 pagesClassification of MatterLouie Raff Michael EstradaNo ratings yet
- Solenoid Valve Namur Fig 33580 AluminiumDocument1 pageSolenoid Valve Namur Fig 33580 AluminiumNam Nguyễn ĐứcNo ratings yet
- A Closer Examination of The Axial Capacity of Eccentrically Loaded Single Angle StrutsDocument4 pagesA Closer Examination of The Axial Capacity of Eccentrically Loaded Single Angle StrutsalbertoxinaNo ratings yet
- 2010 Confinement of Deep Beam Nodal RegionsDocument9 pages2010 Confinement of Deep Beam Nodal RegionsKhNo ratings yet
- Design of Reinforced Beams Is 456-2000: SP 16 Table - 2 - 4Document2 pagesDesign of Reinforced Beams Is 456-2000: SP 16 Table - 2 - 4AbhishekNo ratings yet
- Chapter 10 Work & EnergyDocument8 pagesChapter 10 Work & Energykhushoodevi760No ratings yet
- PlasteringDocument15 pagesPlasteringMegha RajNo ratings yet
- Big Blue 400X Pro Kubota Diesel Engine User ManualDocument84 pagesBig Blue 400X Pro Kubota Diesel Engine User ManualEbrahem Ahmed HafezNo ratings yet
- Plane Table SurveyingDocument71 pagesPlane Table SurveyingBindeshwar YadavNo ratings yet
- 90 1189 2.1 (Edio)Document8 pages90 1189 2.1 (Edio)Fenner Tovar RojasNo ratings yet
- Closed Coil Helical SpringsDocument12 pagesClosed Coil Helical SpringsAtish Kumar100% (7)
- 5204SFI API Valve With Built in Full Body Sight Flow Indicator - 0Document10 pages5204SFI API Valve With Built in Full Body Sight Flow Indicator - 0Patricio G. ArrienNo ratings yet
- Time and Work: Total Work A B CDocument32 pagesTime and Work: Total Work A B CAnimesh SharmaNo ratings yet
- 4+2 CycloadditionsDocument61 pages4+2 CycloadditionsJagjeet GujralNo ratings yet
- Phononic Crystal ThesisDocument8 pagesPhononic Crystal Thesistiarichardsonlittlerock100% (2)
- Instruction Manual: RA 0025 F, RA 0040 F, RA 0063 F, RA 0100 FDocument28 pagesInstruction Manual: RA 0025 F, RA 0040 F, RA 0063 F, RA 0100 Fmahmuod mohamadNo ratings yet
- Percent Composition Penny LabDocument2 pagesPercent Composition Penny Labd0cum3nt123No ratings yet
- Presentation1 CHEMISTRYDocument11 pagesPresentation1 CHEMISTRYsalmanNo ratings yet
- Assignment 6C (Calculation - Analysis) - Attempt ReviewDocument3 pagesAssignment 6C (Calculation - Analysis) - Attempt ReviewDamz RtgNo ratings yet
- 14-139 - Multilin 269 PLUSDocument3 pages14-139 - Multilin 269 PLUSGerson ViverosNo ratings yet