Download as pdf or txt
You might also like
- Cost Accounting CH 17 SolutionsDocument49 pagesCost Accounting CH 17 Solutionsbdameron60% (10)
- CH3802 Formal DistillationDocument33 pagesCH3802 Formal DistillationAldi StefanusNo ratings yet
- CAFS Study NotesDocument32 pagesCAFS Study Notesbrooklyn ihleinNo ratings yet
- SC RE Chap12-Vapour Liquid EquilibriumDocument30 pagesSC RE Chap12-Vapour Liquid EquilibriumweldsvNo ratings yet
- PC Task 1 by Rizwan - AnausDocument5 pagesPC Task 1 by Rizwan - AnausmoinNo ratings yet
- Wagialla, Soliman - 1993 - Distillation Column Simulation by Orthogonal Collocation Efficient Solution StrategyDocument24 pagesWagialla, Soliman - 1993 - Distillation Column Simulation by Orthogonal Collocation Efficient Solution StrategyDOUGLAS RAMON RODRIGUEZ ORDOÑEZNo ratings yet
- Processes: Inside-Out Method For Simulating A Reactive Distillation ProcessDocument17 pagesProcesses: Inside-Out Method For Simulating A Reactive Distillation Processharish dassNo ratings yet
- Column Distillation: Internal Stage-by-Stage Balances: Figure 3-6Document39 pagesColumn Distillation: Internal Stage-by-Stage Balances: Figure 3-6ShamsMohdNo ratings yet
- Lecture2 PDFDocument5 pagesLecture2 PDFAjay SagarNo ratings yet
- Single Theta Method of ConvergenceDocument5 pagesSingle Theta Method of ConvergenceRadheshyam JuturuNo ratings yet
- 3G4 Flash CalculationsDocument9 pages3G4 Flash CalculationsRafael Reyes0% (1)
- Exact Calculation Procedures For Multicomponent DistillationDocument21 pagesExact Calculation Procedures For Multicomponent DistillationRishikesh AwaleNo ratings yet
- Mass and Energy Balances - Stripping Section and Partial ReboilerDocument45 pagesMass and Energy Balances - Stripping Section and Partial ReboilerShamsMohd100% (1)
- AlgoDocument46 pagesAlgoJoseCastilhoNo ratings yet
- Vapor/Liquid Equilibrium: Mata Kuliah: Termodinamika IIDocument70 pagesVapor/Liquid Equilibrium: Mata Kuliah: Termodinamika IIputri wahyuniNo ratings yet
- Liq-Liq & Solid-Liq Separation Notes - 3Document11 pagesLiq-Liq & Solid-Liq Separation Notes - 3mkbm_5543No ratings yet
- P, T-Flash CalculationDocument12 pagesP, T-Flash CalculationBennyNo ratings yet
- DistillationDocument29 pagesDistillationgebremichaelNo ratings yet
- Design of Distillation Column (By Muhammad Faisal)Document23 pagesDesign of Distillation Column (By Muhammad Faisal)EngrFaisalNo ratings yet
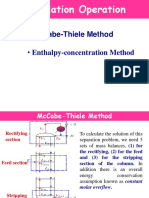
- McCabe-Thiele Method 1Document37 pagesMcCabe-Thiele Method 1HariKrishnaBushi100% (2)
- Vapor Liquid EquilibriumDocument39 pagesVapor Liquid EquilibriumJakeWilliam100% (1)
- Week 2 - Vle Part 1Document35 pagesWeek 2 - Vle Part 1dhanieemaNo ratings yet
- An Improved Method For Numerical Solution of Distillation ProcessesDocument5 pagesAn Improved Method For Numerical Solution of Distillation ProcessesCsaba AndrásNo ratings yet
- Chemical Engineering Mass Transfer NotesDocument36 pagesChemical Engineering Mass Transfer NotesLebohang Czar Nku50% (2)
- Modelling of Continuous Distillation ColumnDocument4 pagesModelling of Continuous Distillation ColumnKate MayerNo ratings yet
- 07 Chapter 10 (Compiled)Document86 pages07 Chapter 10 (Compiled)Sofea IzyanNo ratings yet
- Week 2 - Vle Part 1Document35 pagesWeek 2 - Vle Part 1Syed Hassan Syed Hashim100% (1)
- Chapter 1 - VLE Part 1Document36 pagesChapter 1 - VLE Part 1Solehah OmarNo ratings yet
- 13.02 Phase Diagrams - Binary SystemsDocument12 pages13.02 Phase Diagrams - Binary SystemsDr-SabaJamilNo ratings yet
- R&D Notes Steady-State Multiplicities in Reactive Distillation: Stage-By-Stage Calculation RevisitedDocument8 pagesR&D Notes Steady-State Multiplicities in Reactive Distillation: Stage-By-Stage Calculation Revisitedali_baharevNo ratings yet
- Tsuboka & Katayama - General Design Algorithm Based On Pseudo-Equilibrium Concept For Multistage Component LiquidDocument6 pagesTsuboka & Katayama - General Design Algorithm Based On Pseudo-Equilibrium Concept For Multistage Component LiquidCarlos PlazasNo ratings yet
- Vapor Liquid EquilibriumDocument39 pagesVapor Liquid EquilibriumyeenNo ratings yet
- New Process For Producing Methanol From Coke Oven Gas Using CO Reforming. Comparison With Conventional ProcessDocument14 pagesNew Process For Producing Methanol From Coke Oven Gas Using CO Reforming. Comparison With Conventional ProcessrsigorNo ratings yet
- Separation Processes I: Topic 2: Vapour-Liquid EquilibriumDocument24 pagesSeparation Processes I: Topic 2: Vapour-Liquid EquilibriumPatrice PierreNo ratings yet
- Kesetimbangan Uap Cair 2016Document75 pagesKesetimbangan Uap Cair 2016Wahyu AdrianNo ratings yet
- Chapter 1 - VLE Part 1Document36 pagesChapter 1 - VLE Part 1Roger FernandezNo ratings yet
- XXXDocument86 pagesXXXFatien Zakaria100% (1)
- Mccabe ThieleDocument15 pagesMccabe ThieleChintan ModiNo ratings yet
- Rigorous Distillation Dynamics SimulationsDocument10 pagesRigorous Distillation Dynamics SimulationsAhmed ShaepNo ratings yet
- Non Ideal Binary DistillationDocument23 pagesNon Ideal Binary Distillationsajeevanrs1216No ratings yet
- Lec No.6 Solvent ExtractionDocument13 pagesLec No.6 Solvent Extractionrejie magnayeNo ratings yet
- Ponchon-Savarit NotesDocument19 pagesPonchon-Savarit Noteskyle2kdNo ratings yet
- Aquino Lab 05Document13 pagesAquino Lab 05Ai Rah100% (1)
- DLL - 04 PDFDocument3 pagesDLL - 04 PDFagnesNo ratings yet
- Separation Process Engineering CHEN 312: Ys18@aub - Edu.lbDocument28 pagesSeparation Process Engineering CHEN 312: Ys18@aub - Edu.lbsoe0303No ratings yet
- Column & HE Sizing - PresentationDocument76 pagesColumn & HE Sizing - PresentationRaihan FuadNo ratings yet
- Chapter 1 SlidesDocument13 pagesChapter 1 SlidesMohammed AlshangitiNo ratings yet
- 2 Phase Behavior Fundamentals: Thel, That°" Tem, yDocument21 pages2 Phase Behavior Fundamentals: Thel, That°" Tem, yEdson SejasNo ratings yet
- Vapor-Liquid EquilibriaDocument47 pagesVapor-Liquid EquilibriaKent GardoseNo ratings yet
- Separation Processes Vapor-Liquid Equilibrium: Dr. Ibrahim SuleimanDocument27 pagesSeparation Processes Vapor-Liquid Equilibrium: Dr. Ibrahim Suleimanabood assrfndyNo ratings yet
- Chapter 1Document13 pagesChapter 1Abdullah KutbiNo ratings yet
- Lecture 7: Isothermal Flash CalculationsDocument19 pagesLecture 7: Isothermal Flash CalculationsAREEJ JAVEDNo ratings yet
- Jawaharlal Nehru Technological University Kakinada: III Year B. Tech. Petrochemical Engineering II SemDocument37 pagesJawaharlal Nehru Technological University Kakinada: III Year B. Tech. Petrochemical Engineering II SemHashmi AshmalNo ratings yet
- First Order Systems and Their Responses PDFDocument27 pagesFirst Order Systems and Their Responses PDFNandakumarNo ratings yet
- Modelling and SimulationDocument9 pagesModelling and SimulationCoco LinoNo ratings yet
- Nlewis65 204 208 Classroom Winnick 29 No 3 Summer 1995 CeeDocument5 pagesNlewis65 204 208 Classroom Winnick 29 No 3 Summer 1995 CeeFerdz RmrzNo ratings yet
- ChE 152 Lecture 2a Vapor-Liquid EquilibriaDocument33 pagesChE 152 Lecture 2a Vapor-Liquid EquilibriaEmrico Luiz PerezNo ratings yet
- APC - Chapter 5 - Part 2Document17 pagesAPC - Chapter 5 - Part 2iB13eNo ratings yet
- Lecture-8,9,10 VLE DiagramsDocument64 pagesLecture-8,9,10 VLE DiagramsShiavm PatelNo ratings yet
- Process Modeling and Simulation for Chemical Engineers: Theory and PracticeFrom EverandProcess Modeling and Simulation for Chemical Engineers: Theory and PracticeNo ratings yet
- Module Introduction:: 1.5 HoursDocument5 pagesModule Introduction:: 1.5 HoursJessie TindoyNo ratings yet
- Iso 14122 2 2016Document11 pagesIso 14122 2 2016FengGuang LuNo ratings yet
- Mind The Gap - Navigating The Qty Qly Method - Vaid - DuttaDocument6 pagesMind The Gap - Navigating The Qty Qly Method - Vaid - DuttaMrityunjay AryanNo ratings yet
- Environment MonitoringDocument18 pagesEnvironment MonitoringLakshana Bundhoo100% (1)
- Chapter 1 Shaft (Cont'd)Document47 pagesChapter 1 Shaft (Cont'd)Rayuth KEATNo ratings yet
- Liberty and DisciplineDocument11 pagesLiberty and DisciplineRosa RiusNo ratings yet
- Mortal Kombat 2021 720p WEBRip x264 AAC - (YTS MX)Document203 pagesMortal Kombat 2021 720p WEBRip x264 AAC - (YTS MX)Rano KarnoNo ratings yet
- How Is The Philippines Affected by Climate ChangeDocument2 pagesHow Is The Philippines Affected by Climate ChangeQueenie SantosNo ratings yet
- Biodynamic FarmingDocument20 pagesBiodynamic FarmingAnu Nawhal100% (1)
- 8623 MCQsDocument10 pages8623 MCQsFazalHayatNo ratings yet
- Coefficient of Friction, Rolling Resistance, Air Resistance, AerodynamicsDocument1 pageCoefficient of Friction, Rolling Resistance, Air Resistance, AerodynamicsHasanNo ratings yet
- Chapter 2 - Soil Behavior: - Particulate Nature of SoilDocument28 pagesChapter 2 - Soil Behavior: - Particulate Nature of Soilabcdef456No ratings yet
- Forensic Medicine in PortugalDocument10 pagesForensic Medicine in PortugalAlexandra Ançã PiresNo ratings yet
- The Book of Enoch and New MoonDocument7 pagesThe Book of Enoch and New MoonGavin BeckerNo ratings yet
- Chap 010Document2 pagesChap 010BG Monty 1No ratings yet
- Purdue University PHIL: 111, Introduction To EthicsDocument6 pagesPurdue University PHIL: 111, Introduction To EthicstellmewhourNo ratings yet
- Module 1 Gen. MathDocument11 pagesModule 1 Gen. MathChristina Larubis100% (1)
- Relosa, Shawn Mattew A. BSCPE 311 Problem Solving (2 Items X 10 Points) 1. (10 Points)Document3 pagesRelosa, Shawn Mattew A. BSCPE 311 Problem Solving (2 Items X 10 Points) 1. (10 Points)Shawn RelosaNo ratings yet
- Project ModelDocument19 pagesProject ModelSHRAVYA MANJUNATHNo ratings yet
- Complex Numbers WorksheetDocument2 pagesComplex Numbers WorksheetAshley LewisNo ratings yet
- DIVEMesh UserGuideDocument22 pagesDIVEMesh UserGuideVahid TamimiNo ratings yet
- Supra Slide 68 en FR MotultechDocument2 pagesSupra Slide 68 en FR MotultechQuy NguyenNo ratings yet
- Simulation of Charged Particles in Earths MagnetoDocument7 pagesSimulation of Charged Particles in Earths Magnetoeze_firmatenseNo ratings yet
- Accentuated Eccentric Loading For Training and Performance: A ReviewDocument23 pagesAccentuated Eccentric Loading For Training and Performance: A Reviewmsimoes29No ratings yet
- Textbook Modernism S Visible Hand Architecture and Regulation in America Michael Osman Ebook All Chapter PDFDocument53 pagesTextbook Modernism S Visible Hand Architecture and Regulation in America Michael Osman Ebook All Chapter PDFjames.myrick314100% (13)
- Leins - 2020 - Responsible Investment' ESG and The Post-CrisisDocument22 pagesLeins - 2020 - Responsible Investment' ESG and The Post-Crisisjuliette.geisingerNo ratings yet
- PI KIT 23-25 - IIM Sambalpur PDFDocument90 pagesPI KIT 23-25 - IIM Sambalpur PDFGopal SarangiNo ratings yet
- Indonesian Hotel Annual ReviewDocument34 pagesIndonesian Hotel Annual ReviewSPHM HospitalityNo ratings yet