Download as pdf or txt
You might also like
- RTL Design of AHB ProtocolDocument10 pagesRTL Design of AHB ProtocolAnji medidiNo ratings yet
- CS 25000 Spring 2017 Final Practice SolutionsDocument13 pagesCS 25000 Spring 2017 Final Practice SolutionsTiger TangNo ratings yet
- Logic Circuits Midterm ReviewerDocument38 pagesLogic Circuits Midterm ReviewerHector Ledesma IIINo ratings yet
- VERILOG HDL - Tutorial, PPT FormatDocument30 pagesVERILOG HDL - Tutorial, PPT FormatArslan Kiani100% (2)
- Verilog Code For 4 Bit Ring Counter With TestbenchDocument3 pagesVerilog Code For 4 Bit Ring Counter With Testbenchsoumya100% (1)
- Biju Patnaik University of Technology: Mechanical EngineeringDocument37 pagesBiju Patnaik University of Technology: Mechanical EngineeringBhagaban Das100% (1)
- Data Analysis With Microsoft ExcelDocument532 pagesData Analysis With Microsoft ExcelLULUAREN88% (16)
- 1 - Dem-Cfd Coupling Mathematical Modelling and Case Studies Using Rocky-Dem® and Ansys FluentDocument7 pages1 - Dem-Cfd Coupling Mathematical Modelling and Case Studies Using Rocky-Dem® and Ansys FluentSaraNo ratings yet
- Introduction To Verilog Hardware Description LanguageDocument108 pagesIntroduction To Verilog Hardware Description LanguageKranthi RekhaNo ratings yet
- Verilog Parameters and OperatorsDocument25 pagesVerilog Parameters and OperatorsR INI BHANDARINo ratings yet
- Introduction To VerilogDocument77 pagesIntroduction To VerilogParesh SawantNo ratings yet
- Verilog Code For Fir FilterDocument58 pagesVerilog Code For Fir FilterKishore KumarNo ratings yet
- Verilog SolnDocument15 pagesVerilog Solngannoju423100% (1)
- Cmos Digital Circuits - BookDocument56 pagesCmos Digital Circuits - BookHelder Nascimento100% (1)
- Vlsi Lab ManualDocument27 pagesVlsi Lab ManualSandeep V GowdaNo ratings yet
- Ecad Lab ManualDocument55 pagesEcad Lab Manualjeravi84100% (3)
- Introduction To VerilogDocument88 pagesIntroduction To Verilogmaster vijayNo ratings yet
- Verilog HDL Basics Lab Assignments: Lab Work 1. Study of Module Declaration and Module Instantiation PrinciplesDocument3 pagesVerilog HDL Basics Lab Assignments: Lab Work 1. Study of Module Declaration and Module Instantiation PrinciplesSindhu RajanNo ratings yet
- Basics of Electronics and Microprocessor MCQ'sDocument16 pagesBasics of Electronics and Microprocessor MCQ'srohi8975% (4)
- Verilog HDL Introduction: TextbookDocument41 pagesVerilog HDL Introduction: TextbookAbhishek RanjanNo ratings yet
- Nyquist CriterionDocument14 pagesNyquist Criterionleorom1234No ratings yet
- Test Bench For RomDocument2 pagesTest Bench For Rommnpaliwal020100% (1)
- Timing Design in Digital Systems: Dr. Paul D. FranzonDocument24 pagesTiming Design in Digital Systems: Dr. Paul D. FranzonMaheshNo ratings yet
- Verilog Objective TestDocument5 pagesVerilog Objective TestRajib SamadderNo ratings yet
- Design and Implementation of Floating Point ALU With Parity Generator Using Verilog HDLDocument6 pagesDesign and Implementation of Floating Point ALU With Parity Generator Using Verilog HDLIOSRjournalNo ratings yet
- VERIFICATION OF I2C Using SYSTEM VERILOGDocument5 pagesVERIFICATION OF I2C Using SYSTEM VERILOGSakthi VelanNo ratings yet
- Radix-4 Modified Booth's Multiplier Using Verilog RTLDocument10 pagesRadix-4 Modified Booth's Multiplier Using Verilog RTLPrem KumarNo ratings yet
- Digital Electronics QuestionsDocument8 pagesDigital Electronics QuestionsShivamahendar SunkaNo ratings yet
- Ee 241 Digital Circuits Final Exam Solution ManualDocument10 pagesEe 241 Digital Circuits Final Exam Solution ManualkdrdNo ratings yet
- (Up, Down and Modn) CountersDocument76 pages(Up, Down and Modn) CountersAashik ShaikNo ratings yet
- Up Down CounterDocument20 pagesUp Down Countersumi36117No ratings yet
- Lec4 VerilogDocument58 pagesLec4 VerilogRohit BhelkarNo ratings yet
- Veilog HDL Module 3Document62 pagesVeilog HDL Module 3Mallik KglNo ratings yet
- 9A04706 Digital Design Through Verilog HDL PDFDocument4 pages9A04706 Digital Design Through Verilog HDL PDFTayyabunnissa BegumNo ratings yet
- VHDL Very High Speed Integrated Language: Unit VDocument41 pagesVHDL Very High Speed Integrated Language: Unit VB. MeenakshiNo ratings yet
- Verilog Updated ProgramsDocument47 pagesVerilog Updated Programsanand_duraiswamy100% (1)
- Digital Principle and System DesignDocument26 pagesDigital Principle and System Designainugiri100% (4)
- Ver I Log ExamplesDocument22 pagesVer I Log ExamplesDayanand Gowda KrNo ratings yet
- Implementing Communication Bridge Between I2C and APBDocument4 pagesImplementing Communication Bridge Between I2C and APBDon RajuNo ratings yet
- Kunci Jawaban Soal Buku Computer and Communication Networks Nader F Mir Chapter 1Document8 pagesKunci Jawaban Soal Buku Computer and Communication Networks Nader F Mir Chapter 1Aditya IrawanNo ratings yet
- High-Gain Differential Amplifier DesignDocument21 pagesHigh-Gain Differential Amplifier DesignBodhayan PrasadNo ratings yet
- Test Benches in VerilogDocument16 pagesTest Benches in VerilogSharan ChaitanyaNo ratings yet
- VerilogexampleDocument20 pagesVerilogexampleGayathri SankarNo ratings yet
- How To Interfacing Sensor With LPC2148 ARMDocument8 pagesHow To Interfacing Sensor With LPC2148 ARMSubir MaityNo ratings yet
- Verilog Imp...Document105 pagesVerilog Imp...Arun JyothiNo ratings yet
- Design of Synchronous FifoDocument18 pagesDesign of Synchronous Fifoprasu440No ratings yet
- Assignment 04 Combinational CircuitsDocument3 pagesAssignment 04 Combinational CircuitsNirmal SinghaniaNo ratings yet
- Structural Data Types: Wire and RegDocument25 pagesStructural Data Types: Wire and RegRAGUL RAJ SNo ratings yet
- PWMDocument57 pagesPWMAhmed Mortuza Saleque SaikotNo ratings yet
- VLSI Cadance ManualDocument84 pagesVLSI Cadance ManualTony ParkerNo ratings yet
- Chapter 3 Gate-Level MinimizationDocument67 pagesChapter 3 Gate-Level Minimizationmdhuq1No ratings yet
- ARM Organization and Implementation: Aleksandar MilenkovicDocument37 pagesARM Organization and Implementation: Aleksandar Milenkovicarthicse100% (1)
- Wireless Channel CharacteristicsDocument4 pagesWireless Channel Characteristicsbenny_1811No ratings yet
- Deep SubmicronDocument20 pagesDeep SubmicronArchana Rk50% (2)
- Verilog HDL: ModuleDocument9 pagesVerilog HDL: ModuleAvinash ReddyNo ratings yet
- Verilog Lecture NotesDocument92 pagesVerilog Lecture NotesRavi KishoreNo ratings yet
- Verilog HDL Part IIDocument61 pagesVerilog HDL Part IIdbanbumani_501791840No ratings yet
- Introduction To Verilog Hardware Description LanguageDocument108 pagesIntroduction To Verilog Hardware Description LanguageVidya DilipNo ratings yet
- Unit-V Verilog Hardware Description LanguageDocument73 pagesUnit-V Verilog Hardware Description LanguageThariq Azeez MNo ratings yet
- 03-Verilog Modules and Ports-MergedDocument170 pages03-Verilog Modules and Ports-MergedqwertyNo ratings yet
- Verilog GATE AND DATA FLOWDocument64 pagesVerilog GATE AND DATA FLOWPRIYA MISHRANo ratings yet
- Verilog SAPDocument69 pagesVerilog SAPAustin Tyson DsouzaNo ratings yet
- EEE 426 ETE 448 Exp 8Document5 pagesEEE 426 ETE 448 Exp 8Sadikul Hasan Mridha Atul (181016024)No ratings yet
- C ProgrammingDocument373 pagesC ProgrammingĹalam ŠainaťhNo ratings yet
- Pal & PlaDocument4 pagesPal & PlaĹalam ŠainaťhNo ratings yet
- STLD Unit 4Document73 pagesSTLD Unit 4Ĺalam ŠainaťhNo ratings yet
- STLD Unit 4Document73 pagesSTLD Unit 4Ĺalam ŠainaťhNo ratings yet
- Math Reviewer For QuizbeeDocument4 pagesMath Reviewer For QuizbeeAdrienne CabanigNo ratings yet
- Prediction of Permeability and Porosity From Well Log Data Using The Nonparametric Regression With Multivariate Analysis and Neural Network, Hassi R'Mel Field, AlgeriaDocument16 pagesPrediction of Permeability and Porosity From Well Log Data Using The Nonparametric Regression With Multivariate Analysis and Neural Network, Hassi R'Mel Field, Algeriadobeng147No ratings yet
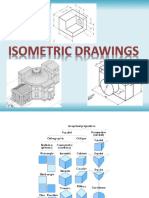
- Isometric DrawingDocument22 pagesIsometric Drawingjasmine lyka FranciscoNo ratings yet
- PERT, CPM and Agile Project ManagementDocument4 pagesPERT, CPM and Agile Project ManagementantuhuentruNo ratings yet
- Mindsight CodexDocument87 pagesMindsight CodexFathin NafisaNo ratings yet
- ForecastingDocument31 pagesForecastinghananshahid96No ratings yet
- ChatLog Indore ML Python Batch 2 2021 - 07 - 23 14 - 56Document13 pagesChatLog Indore ML Python Batch 2 2021 - 07 - 23 14 - 56SIDDHARTH SHRIVASTAVANo ratings yet
- Why Retailers Sell More or Less Than Their Fair Share in A CategoryDocument30 pagesWhy Retailers Sell More or Less Than Their Fair Share in A CategoryKetanDhillonNo ratings yet
- A New Underwater Image Enhancing Method Via Color Correction and Illumination AdjustmentDocument4 pagesA New Underwater Image Enhancing Method Via Color Correction and Illumination AdjustmentguterresNo ratings yet
- Chapter 5 SolutionsDocument16 pagesChapter 5 Solutionshassan.murad60% (5)
- Financial Econometrics and Empirical Finance II: Professor Massimo Guidolin (With Prof. Carlo Favero)Document4 pagesFinancial Econometrics and Empirical Finance II: Professor Massimo Guidolin (With Prof. Carlo Favero)Diamante GomezNo ratings yet
- t1 - Trigonometric Functions - 1Document23 pagest1 - Trigonometric Functions - 1utpNo ratings yet
- Chapter 4 - Dynamic AnalysisDocument16 pagesChapter 4 - Dynamic AnalysisrizkielvNo ratings yet
- Decimal Notation and Rounding Notes Math 0106Document5 pagesDecimal Notation and Rounding Notes Math 0106Jayson NolascoNo ratings yet
- Ce 123 Dynamics of Solids: Prof. Beda M. Mutagahywa Faculty of Engineering. SAUTDocument16 pagesCe 123 Dynamics of Solids: Prof. Beda M. Mutagahywa Faculty of Engineering. SAUTAwadhiNo ratings yet
- 1st & 2nd SemisterDocument2 pages1st & 2nd SemisterDakhani SohelNo ratings yet
- Vissim User'S GuideDocument506 pagesVissim User'S Guidekaran11deshmukhNo ratings yet
- Aqa 83622 SMS PDFDocument14 pagesAqa 83622 SMS PDFT SolomonNo ratings yet
- Von70154 10 c10 303-338triDocument36 pagesVon70154 10 c10 303-338trinhung.ntc4No ratings yet
- Ordinatio The Vitruvian Concept As A Generator of Architectural Design by Leandro ManentiDocument11 pagesOrdinatio The Vitruvian Concept As A Generator of Architectural Design by Leandro ManentiMax MinNo ratings yet
- AS121Document5 pagesAS121Abdul Qadir KhanNo ratings yet
- Ae Civil Under Trade Commerce 2016 Engineering Paper IIIDocument6 pagesAe Civil Under Trade Commerce 2016 Engineering Paper IIICheng EngiNo ratings yet
- B SC Economics Honours 2013-14 Syllabus PDFDocument22 pagesB SC Economics Honours 2013-14 Syllabus PDFEdmund ZinNo ratings yet
- Evaluating LimitsDocument8 pagesEvaluating Limitssumsyed786No ratings yet
- M4310students PDFDocument68 pagesM4310students PDFsbfjbsjkbfNo ratings yet
- CFD EM C5 FiniteVolumeMethodDocument22 pagesCFD EM C5 FiniteVolumeMethodMinh TrựcNo ratings yet
- 02 Natcon - Victoria UniversityDocument76 pages02 Natcon - Victoria UniversityOsama IbrahimNo ratings yet