
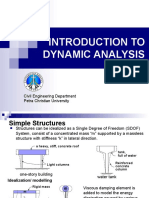
Introduction To Free Vibration: MXT KXT MXT KXT X XX V
Introduction To Free Vibration: MXT KXT MXT KXT X XX V
You might also like
- Wk6Wuhhw6Xlwh 'Hqyhu&Rorudgr: 'HSRVLWLRQDocument22 pagesWk6Wuhhw6Xlwh 'Hqyhu&Rorudgr: 'HSRVLWLRQkc wildmoonNo ratings yet
- Acco 365 Review Class QuestionsDocument31 pagesAcco 365 Review Class QuestionsHeyue XiaoNo ratings yet
- Lecture 1aDocument19 pagesLecture 1aYusuf GulNo ratings yet
- Best Ignored: Force Constant "K"Document3 pagesBest Ignored: Force Constant "K"Tuan TranNo ratings yet
- V&N 354 - LectureLesing1Document4 pagesV&N 354 - LectureLesing1YemukelaniNo ratings yet
- MCG 4308 Lec 4Document25 pagesMCG 4308 Lec 4Nadjet AkloucheNo ratings yet
- MCG 4308 Lec 4Document25 pagesMCG 4308 Lec 4Nadjet AkloucheNo ratings yet
- Chap 1 OscillationsDocument53 pagesChap 1 OscillationskhaledstephannNo ratings yet
- 2.2.5 Boundary/initial Conditions: Du DX U 0 in The Domain (A, B) - y (A) A y (B) BDocument4 pages2.2.5 Boundary/initial Conditions: Du DX U 0 in The Domain (A, B) - y (A) A y (B) BIrfan Nazir NoriNo ratings yet
- Unit 2 - Basics of Vibration TheoryDocument8 pagesUnit 2 - Basics of Vibration TheoryFroilan NeyNo ratings yet
- 40 Sample ChapterDocument15 pages40 Sample ChapterarjunNo ratings yet
- 3 Mathematical Models of SystemsDocument35 pages3 Mathematical Models of SystemsDawa PenjorNo ratings yet
- Structural Dynamics NotesDocument61 pagesStructural Dynamics Noteskpsd58625No ratings yet
- Module IV Vibration EngineeringDocument14 pagesModule IV Vibration Engineeringzyx xyzNo ratings yet
- Things To Learn Today: 1. Equivalent Spring Stiffness 2. A PendulumDocument29 pagesThings To Learn Today: 1. Equivalent Spring Stiffness 2. A PendulumSayantan GhoshNo ratings yet
- PHM031 - Modern Mechanics - Lecture 5Document19 pagesPHM031 - Modern Mechanics - Lecture 5Mohammed ZaitounNo ratings yet
- Dynamics - Chapter 19 (Beer7)Document32 pagesDynamics - Chapter 19 (Beer7)api-3709496100% (2)
- Eng Vibration Handout 3Document4 pagesEng Vibration Handout 3Je SolarteNo ratings yet
- 3-Introduction To Dynamic AnalysisDocument16 pages3-Introduction To Dynamic Analysiskenny lieNo ratings yet
- LECT9 6pDocument14 pagesLECT9 6pAbidul IslamNo ratings yet
- 3.modeling of Mechanical SystemDocument17 pages3.modeling of Mechanical SystemAjay JagarlamudiNo ratings yet
- EAT216 - Vibration 20191008Document47 pagesEAT216 - Vibration 20191008ibrahim ibrahimNo ratings yet
- Tutorial 4 - Solutions - Forced VibrationsDocument60 pagesTutorial 4 - Solutions - Forced Vibrationsmohd.a.alawadNo ratings yet
- V&N 354 LectureLesing4Document6 pagesV&N 354 LectureLesing4YemukelaniNo ratings yet
- wk4 Lectrure4 23oct2018Document21 pageswk4 Lectrure4 23oct2018هاني احمدNo ratings yet
- Simple Harmonic Motion: 8.01 Week 12D1Document23 pagesSimple Harmonic Motion: 8.01 Week 12D1Deepak AwasthiNo ratings yet
- 3 Free Vibration LectureDocument16 pages3 Free Vibration LectureKhalil KhdourNo ratings yet
- Harmonic OscillatorDocument25 pagesHarmonic OscillatorRuri Agung WahyuonoNo ratings yet
- Midterm Review PDFDocument16 pagesMidterm Review PDFMt RushNo ratings yet
- Lec 28Document5 pagesLec 28110 RCCNo ratings yet
- ExcerptDocument10 pagesExcerptAndrew PhoenixNo ratings yet
- Introduction To QMDocument3 pagesIntroduction To QMNicholas OwNo ratings yet
- Fiz138 w12-ch15Document9 pagesFiz138 w12-ch15mustafadershesabiNo ratings yet
- 3 - Unit 2 ME 70 Free Vibration Lecture 1Document22 pages3 - Unit 2 ME 70 Free Vibration Lecture 1KEZIA MAE JALANDONINo ratings yet
- Vibrations of Single Degree of Freedom Systems: M X (T) F (T) KDocument25 pagesVibrations of Single Degree of Freedom Systems: M X (T) F (T) KIbraheem OlugbadeNo ratings yet
- Logarithmic DecrementDocument7 pagesLogarithmic DecrementammarNo ratings yet
- DSP MidtermDocument4 pagesDSP MidtermRen Aldrin BobadillaNo ratings yet
- Pendulum (Bandul)Document38 pagesPendulum (Bandul)bat.laughNo ratings yet
- 139514485-YCT Oscillations NEET JEE Questions PracticeDocument219 pages139514485-YCT Oscillations NEET JEE Questions PracticeRamesh R ReddyNo ratings yet
- Free and Forced Vibration of A Single Degree of Freedom Mechanical SystemDocument8 pagesFree and Forced Vibration of A Single Degree of Freedom Mechanical SystemburakNo ratings yet
- Chapter 15Document22 pagesChapter 15Rynardt VogelNo ratings yet
- 122 TD4Document15 pages122 TD4Sebastiao SilvaNo ratings yet
- 1.a. Undamped Free VibrationsDocument81 pages1.a. Undamped Free VibrationsPrajwal CNo ratings yet
- OscilatorsDocument21 pagesOscilatorsPepe CruzNo ratings yet
- 6-1 Simple Harmonic MotionDocument42 pages6-1 Simple Harmonic MotionChina lifeNo ratings yet
- PPT - Ch1 1to1 3 192069 PDFDocument44 pagesPPT - Ch1 1to1 3 192069 PDFYousef SardahiNo ratings yet
- CEI SD 100 Structural Dynamics LR03 NewDocument28 pagesCEI SD 100 Structural Dynamics LR03 NewSahar Aktham RashedNo ratings yet
- 信號期中大抄Document2 pages信號期中大抄林昱呈No ratings yet
- Complexity and CriticalityDocument25 pagesComplexity and CriticalityAntonio SanchezNo ratings yet
- A Review On Particle and Rigid Body Dynamics: Prof. Lapo GoriDocument27 pagesA Review On Particle and Rigid Body Dynamics: Prof. Lapo GoriMaterial UFMGNo ratings yet
- SDOFDocument30 pagesSDOFb ramachandraNo ratings yet
- Lecture 03Document18 pagesLecture 03Bogdan NeamtuNo ratings yet
- Undamped Free Vibrations: Free Vibration or Natural VibrationDocument81 pagesUndamped Free Vibrations: Free Vibration or Natural Vibrationpiravi66No ratings yet
- Wave Motion - Short Notes - Arjuna NEET 2025Document2 pagesWave Motion - Short Notes - Arjuna NEET 2025ashabisht5047No ratings yet
- Solution of Free Undamped Vibration For A SDOF System Support Movement of StructuresDocument1 pageSolution of Free Undamped Vibration For A SDOF System Support Movement of StructuresAhmed KhalilNo ratings yet
- Simple Harmonic MotionDocument23 pagesSimple Harmonic MotionAdeeba JunaidiNo ratings yet
- PH107 QM 1-6 PDFDocument165 pagesPH107 QM 1-6 PDFHimanshu SinghNo ratings yet
- Bariscrotone (Jennyfer) PDFDocument23 pagesBariscrotone (Jennyfer) PDFJulian David Henao EscobarNo ratings yet
- UNIT-6 MechatronicDocument10 pagesUNIT-6 MechatronicbhagavanNo ratings yet
- L1 ProjectileMotionDocument86 pagesL1 ProjectileMotionArafat AnikNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Lessons Learned From Board Members of ColorDocument12 pagesLessons Learned From Board Members of Color3BL Media StaffNo ratings yet
- FRM Registration Step 2Document2 pagesFRM Registration Step 2Anonymous YN7Qw6pH3No ratings yet
- LTO Circular Order - RA 4136 - JAO No. 2014-01 (Applicable Laws Consti Assignment)Document4 pagesLTO Circular Order - RA 4136 - JAO No. 2014-01 (Applicable Laws Consti Assignment)Adoniz Tabucal100% (2)
- Q1. Patson Corp: Journal EntriesDocument2 pagesQ1. Patson Corp: Journal EntriesPrince-SimonJohnMwanzaNo ratings yet
- Warren Buffet CaseDocument4 pagesWarren Buffet Casetania shaheenNo ratings yet
- Dokumen - Tips Joint Dti Da Administrative Order No 10 02 S 2010Document4 pagesDokumen - Tips Joint Dti Da Administrative Order No 10 02 S 2010crazzy foryouNo ratings yet
- Astm A794-97Document3 pagesAstm A794-97FeteneNo ratings yet
- Extinguishment of ObligationsDocument89 pagesExtinguishment of ObligationsTori PeigeNo ratings yet
- Property Law IDocument10 pagesProperty Law IDhruv Thakur0% (1)
- Extension in PaymentDocument3 pagesExtension in PaymentAbhishek VermaNo ratings yet
- Khushwant Singh (Born Khushal Singh, 15 August 1915Document5 pagesKhushwant Singh (Born Khushal Singh, 15 August 1915LipikaNo ratings yet
- PlanningDocument59 pagesPlanningJudy100% (3)
- Spy System in Ancient India From Vedic Period To Gupta PeriodDocument114 pagesSpy System in Ancient India From Vedic Period To Gupta Periodarunsarda6969No ratings yet
- CH 1 - Introduction To Financial ManagementDocument18 pagesCH 1 - Introduction To Financial Managementmaheshbendigeri5945No ratings yet
- Examination On International Money MarketsDocument5 pagesExamination On International Money MarketsRandy ManzanoNo ratings yet
- 7CRRYDDocument1 page7CRRYDShoutook JohnNo ratings yet
- Internship Report Based On InsuranceDocument26 pagesInternship Report Based On InsuranceTesnimNo ratings yet
- 2014-07-21 Monthly Attendance Report Template Format OptionsDocument3 pages2014-07-21 Monthly Attendance Report Template Format OptionsAhmed El AmraniNo ratings yet
- HBL Chip and PIN PDFDocument4 pagesHBL Chip and PIN PDFNomanNo ratings yet
- HR Generalist Course ContentDocument5 pagesHR Generalist Course ContentswayamNo ratings yet
- Con Law Simulation Elonis VDocument15 pagesCon Law Simulation Elonis Vapi-353466722No ratings yet
- BBC Code of ConductDocument28 pagesBBC Code of Conductapi-396156073No ratings yet
- Rosa Parks 100th Birthday QuestionsDocument5 pagesRosa Parks 100th Birthday Questionsapi-310709379No ratings yet
- FACTS:Morada, A Filipina Flight Stewardess For SAUDIA, Was A Attempted Raped by Saudia Arabian NationalDocument39 pagesFACTS:Morada, A Filipina Flight Stewardess For SAUDIA, Was A Attempted Raped by Saudia Arabian NationalVaness MendezNo ratings yet
- 2924-A300-13C67-DWG-0004 - R0.1 - Electrical Cable Routing and Tray Routing Layout Admin BuildingDocument8 pages2924-A300-13C67-DWG-0004 - R0.1 - Electrical Cable Routing and Tray Routing Layout Admin BuildingRonti ChanyangNo ratings yet
- CognizanceDocument15 pagesCognizanceKanishka SihareNo ratings yet
- FxView FAQDocument9 pagesFxView FAQCarlaLopesNo ratings yet
- Work & Wages + SolutionsDocument10 pagesWork & Wages + SolutionsHello100% (1)
























































































Download as pdf or txt
You might also like
- Wk6Wuhhw6Xlwh 'Hqyhu&Rorudgr: 'HSRVLWLRQDocument22 pagesWk6Wuhhw6Xlwh 'Hqyhu&Rorudgr: 'HSRVLWLRQkc wildmoonNo ratings yet
- Acco 365 Review Class QuestionsDocument31 pagesAcco 365 Review Class QuestionsHeyue XiaoNo ratings yet
- Lecture 1aDocument19 pagesLecture 1aYusuf GulNo ratings yet
- Best Ignored: Force Constant "K"Document3 pagesBest Ignored: Force Constant "K"Tuan TranNo ratings yet
- V&N 354 - LectureLesing1Document4 pagesV&N 354 - LectureLesing1YemukelaniNo ratings yet
- MCG 4308 Lec 4Document25 pagesMCG 4308 Lec 4Nadjet AkloucheNo ratings yet
- MCG 4308 Lec 4Document25 pagesMCG 4308 Lec 4Nadjet AkloucheNo ratings yet
- Chap 1 OscillationsDocument53 pagesChap 1 OscillationskhaledstephannNo ratings yet
- 2.2.5 Boundary/initial Conditions: Du DX U 0 in The Domain (A, B) - y (A) A y (B) BDocument4 pages2.2.5 Boundary/initial Conditions: Du DX U 0 in The Domain (A, B) - y (A) A y (B) BIrfan Nazir NoriNo ratings yet
- Unit 2 - Basics of Vibration TheoryDocument8 pagesUnit 2 - Basics of Vibration TheoryFroilan NeyNo ratings yet
- 40 Sample ChapterDocument15 pages40 Sample ChapterarjunNo ratings yet
- 3 Mathematical Models of SystemsDocument35 pages3 Mathematical Models of SystemsDawa PenjorNo ratings yet
- Structural Dynamics NotesDocument61 pagesStructural Dynamics Noteskpsd58625No ratings yet
- Module IV Vibration EngineeringDocument14 pagesModule IV Vibration Engineeringzyx xyzNo ratings yet
- Things To Learn Today: 1. Equivalent Spring Stiffness 2. A PendulumDocument29 pagesThings To Learn Today: 1. Equivalent Spring Stiffness 2. A PendulumSayantan GhoshNo ratings yet
- PHM031 - Modern Mechanics - Lecture 5Document19 pagesPHM031 - Modern Mechanics - Lecture 5Mohammed ZaitounNo ratings yet
- Dynamics - Chapter 19 (Beer7)Document32 pagesDynamics - Chapter 19 (Beer7)api-3709496100% (2)
- Eng Vibration Handout 3Document4 pagesEng Vibration Handout 3Je SolarteNo ratings yet
- 3-Introduction To Dynamic AnalysisDocument16 pages3-Introduction To Dynamic Analysiskenny lieNo ratings yet
- LECT9 6pDocument14 pagesLECT9 6pAbidul IslamNo ratings yet
- 3.modeling of Mechanical SystemDocument17 pages3.modeling of Mechanical SystemAjay JagarlamudiNo ratings yet
- EAT216 - Vibration 20191008Document47 pagesEAT216 - Vibration 20191008ibrahim ibrahimNo ratings yet
- Tutorial 4 - Solutions - Forced VibrationsDocument60 pagesTutorial 4 - Solutions - Forced Vibrationsmohd.a.alawadNo ratings yet
- V&N 354 LectureLesing4Document6 pagesV&N 354 LectureLesing4YemukelaniNo ratings yet
- wk4 Lectrure4 23oct2018Document21 pageswk4 Lectrure4 23oct2018هاني احمدNo ratings yet
- Simple Harmonic Motion: 8.01 Week 12D1Document23 pagesSimple Harmonic Motion: 8.01 Week 12D1Deepak AwasthiNo ratings yet
- 3 Free Vibration LectureDocument16 pages3 Free Vibration LectureKhalil KhdourNo ratings yet
- Harmonic OscillatorDocument25 pagesHarmonic OscillatorRuri Agung WahyuonoNo ratings yet
- Midterm Review PDFDocument16 pagesMidterm Review PDFMt RushNo ratings yet
- Lec 28Document5 pagesLec 28110 RCCNo ratings yet
- ExcerptDocument10 pagesExcerptAndrew PhoenixNo ratings yet
- Introduction To QMDocument3 pagesIntroduction To QMNicholas OwNo ratings yet
- Fiz138 w12-ch15Document9 pagesFiz138 w12-ch15mustafadershesabiNo ratings yet
- 3 - Unit 2 ME 70 Free Vibration Lecture 1Document22 pages3 - Unit 2 ME 70 Free Vibration Lecture 1KEZIA MAE JALANDONINo ratings yet
- Vibrations of Single Degree of Freedom Systems: M X (T) F (T) KDocument25 pagesVibrations of Single Degree of Freedom Systems: M X (T) F (T) KIbraheem OlugbadeNo ratings yet
- Logarithmic DecrementDocument7 pagesLogarithmic DecrementammarNo ratings yet
- DSP MidtermDocument4 pagesDSP MidtermRen Aldrin BobadillaNo ratings yet
- Pendulum (Bandul)Document38 pagesPendulum (Bandul)bat.laughNo ratings yet
- 139514485-YCT Oscillations NEET JEE Questions PracticeDocument219 pages139514485-YCT Oscillations NEET JEE Questions PracticeRamesh R ReddyNo ratings yet
- Free and Forced Vibration of A Single Degree of Freedom Mechanical SystemDocument8 pagesFree and Forced Vibration of A Single Degree of Freedom Mechanical SystemburakNo ratings yet
- Chapter 15Document22 pagesChapter 15Rynardt VogelNo ratings yet
- 122 TD4Document15 pages122 TD4Sebastiao SilvaNo ratings yet
- 1.a. Undamped Free VibrationsDocument81 pages1.a. Undamped Free VibrationsPrajwal CNo ratings yet
- OscilatorsDocument21 pagesOscilatorsPepe CruzNo ratings yet
- 6-1 Simple Harmonic MotionDocument42 pages6-1 Simple Harmonic MotionChina lifeNo ratings yet
- PPT - Ch1 1to1 3 192069 PDFDocument44 pagesPPT - Ch1 1to1 3 192069 PDFYousef SardahiNo ratings yet
- CEI SD 100 Structural Dynamics LR03 NewDocument28 pagesCEI SD 100 Structural Dynamics LR03 NewSahar Aktham RashedNo ratings yet
- 信號期中大抄Document2 pages信號期中大抄林昱呈No ratings yet
- Complexity and CriticalityDocument25 pagesComplexity and CriticalityAntonio SanchezNo ratings yet
- A Review On Particle and Rigid Body Dynamics: Prof. Lapo GoriDocument27 pagesA Review On Particle and Rigid Body Dynamics: Prof. Lapo GoriMaterial UFMGNo ratings yet
- SDOFDocument30 pagesSDOFb ramachandraNo ratings yet
- Lecture 03Document18 pagesLecture 03Bogdan NeamtuNo ratings yet
- Undamped Free Vibrations: Free Vibration or Natural VibrationDocument81 pagesUndamped Free Vibrations: Free Vibration or Natural Vibrationpiravi66No ratings yet
- Wave Motion - Short Notes - Arjuna NEET 2025Document2 pagesWave Motion - Short Notes - Arjuna NEET 2025ashabisht5047No ratings yet
- Solution of Free Undamped Vibration For A SDOF System Support Movement of StructuresDocument1 pageSolution of Free Undamped Vibration For A SDOF System Support Movement of StructuresAhmed KhalilNo ratings yet
- Simple Harmonic MotionDocument23 pagesSimple Harmonic MotionAdeeba JunaidiNo ratings yet
- PH107 QM 1-6 PDFDocument165 pagesPH107 QM 1-6 PDFHimanshu SinghNo ratings yet
- Bariscrotone (Jennyfer) PDFDocument23 pagesBariscrotone (Jennyfer) PDFJulian David Henao EscobarNo ratings yet
- UNIT-6 MechatronicDocument10 pagesUNIT-6 MechatronicbhagavanNo ratings yet
- L1 ProjectileMotionDocument86 pagesL1 ProjectileMotionArafat AnikNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Lessons Learned From Board Members of ColorDocument12 pagesLessons Learned From Board Members of Color3BL Media StaffNo ratings yet
- FRM Registration Step 2Document2 pagesFRM Registration Step 2Anonymous YN7Qw6pH3No ratings yet
- LTO Circular Order - RA 4136 - JAO No. 2014-01 (Applicable Laws Consti Assignment)Document4 pagesLTO Circular Order - RA 4136 - JAO No. 2014-01 (Applicable Laws Consti Assignment)Adoniz Tabucal100% (2)
- Q1. Patson Corp: Journal EntriesDocument2 pagesQ1. Patson Corp: Journal EntriesPrince-SimonJohnMwanzaNo ratings yet
- Warren Buffet CaseDocument4 pagesWarren Buffet Casetania shaheenNo ratings yet
- Dokumen - Tips Joint Dti Da Administrative Order No 10 02 S 2010Document4 pagesDokumen - Tips Joint Dti Da Administrative Order No 10 02 S 2010crazzy foryouNo ratings yet
- Astm A794-97Document3 pagesAstm A794-97FeteneNo ratings yet
- Extinguishment of ObligationsDocument89 pagesExtinguishment of ObligationsTori PeigeNo ratings yet
- Property Law IDocument10 pagesProperty Law IDhruv Thakur0% (1)
- Extension in PaymentDocument3 pagesExtension in PaymentAbhishek VermaNo ratings yet
- Khushwant Singh (Born Khushal Singh, 15 August 1915Document5 pagesKhushwant Singh (Born Khushal Singh, 15 August 1915LipikaNo ratings yet
- PlanningDocument59 pagesPlanningJudy100% (3)
- Spy System in Ancient India From Vedic Period To Gupta PeriodDocument114 pagesSpy System in Ancient India From Vedic Period To Gupta Periodarunsarda6969No ratings yet
- CH 1 - Introduction To Financial ManagementDocument18 pagesCH 1 - Introduction To Financial Managementmaheshbendigeri5945No ratings yet
- Examination On International Money MarketsDocument5 pagesExamination On International Money MarketsRandy ManzanoNo ratings yet
- 7CRRYDDocument1 page7CRRYDShoutook JohnNo ratings yet
- Internship Report Based On InsuranceDocument26 pagesInternship Report Based On InsuranceTesnimNo ratings yet
- 2014-07-21 Monthly Attendance Report Template Format OptionsDocument3 pages2014-07-21 Monthly Attendance Report Template Format OptionsAhmed El AmraniNo ratings yet
- HBL Chip and PIN PDFDocument4 pagesHBL Chip and PIN PDFNomanNo ratings yet
- HR Generalist Course ContentDocument5 pagesHR Generalist Course ContentswayamNo ratings yet
- Con Law Simulation Elonis VDocument15 pagesCon Law Simulation Elonis Vapi-353466722No ratings yet
- BBC Code of ConductDocument28 pagesBBC Code of Conductapi-396156073No ratings yet
- Rosa Parks 100th Birthday QuestionsDocument5 pagesRosa Parks 100th Birthday Questionsapi-310709379No ratings yet
- FACTS:Morada, A Filipina Flight Stewardess For SAUDIA, Was A Attempted Raped by Saudia Arabian NationalDocument39 pagesFACTS:Morada, A Filipina Flight Stewardess For SAUDIA, Was A Attempted Raped by Saudia Arabian NationalVaness MendezNo ratings yet
- 2924-A300-13C67-DWG-0004 - R0.1 - Electrical Cable Routing and Tray Routing Layout Admin BuildingDocument8 pages2924-A300-13C67-DWG-0004 - R0.1 - Electrical Cable Routing and Tray Routing Layout Admin BuildingRonti ChanyangNo ratings yet
- CognizanceDocument15 pagesCognizanceKanishka SihareNo ratings yet
- FxView FAQDocument9 pagesFxView FAQCarlaLopesNo ratings yet
- Work & Wages + SolutionsDocument10 pagesWork & Wages + SolutionsHello100% (1)