Download as pdf or txt
You might also like
- Lesson Plan in SwotDocument7 pagesLesson Plan in SwotFlorentina Visto100% (2)
- Hamann - Sewage Treatment Plants - HL Cont CompactDocument5 pagesHamann - Sewage Treatment Plants - HL Cont CompactAbrham B. GMNo ratings yet
- InstrManual SCO1-1Document29 pagesInstrManual SCO1-1Juan Felipe AlvarezNo ratings yet
- Aviation Aircraft Reliability Study PDFDocument113 pagesAviation Aircraft Reliability Study PDFAsad QadriNo ratings yet
- Stirling Convertor Control For A Concept Rover at NASA Glenn Research CenterDocument20 pagesStirling Convertor Control For A Concept Rover at NASA Glenn Research Center강태욱No ratings yet
- Evaluation of An Outer Loop Retrofit Architecture For Intelligent Turbofan Engine Thrust ControlDocument34 pagesEvaluation of An Outer Loop Retrofit Architecture For Intelligent Turbofan Engine Thrust ControlwilliamNo ratings yet
- NASA-TM-2012-217252 Full-Scale Turbofan-Engine Turbine-Transfer Function Determination Using Three Internal SensorsDocument20 pagesNASA-TM-2012-217252 Full-Scale Turbofan-Engine Turbine-Transfer Function Determination Using Three Internal SensorsMarek CelNo ratings yet
- Intelligent Engine Systems: Adaptive ControlDocument85 pagesIntelligent Engine Systems: Adaptive ControlLee JamesNo ratings yet
- Nasa - TVTDocument32 pagesNasa - TVTluisNo ratings yet
- Reentry Vehicle Flight Controls Design Guidelines: Dynamic InversionDocument118 pagesReentry Vehicle Flight Controls Design Guidelines: Dynamic InversionramesheieNo ratings yet
- NASA-CR-2014-218537 Supersonic Wing Optimization Using SpaRibs - 2014Document31 pagesNASA-CR-2014-218537 Supersonic Wing Optimization Using SpaRibs - 2014Konstantin PredachenkoNo ratings yet
- Shape Changing Airfoil: NASA/CR-2005-213971Document52 pagesShape Changing Airfoil: NASA/CR-2005-213971Abdullah Al-HelowNo ratings yet
- The GE-NASA RTA Hyperburner Design and DevelopmentDocument22 pagesThe GE-NASA RTA Hyperburner Design and DevelopmentSadewo YaktiNo ratings yet
- Enhanced Fan Noise Modeling For Turbofan EnginesDocument92 pagesEnhanced Fan Noise Modeling For Turbofan EnginesLi LiNo ratings yet
- HPT Clearance Control: Intelligent Engine Systems-Phase 1Document16 pagesHPT Clearance Control: Intelligent Engine Systems-Phase 1ANTONIONo ratings yet
- Parametric (On-Design) Cycle Analysis For A Separate-Exhaust Turbofan Engine With Interstage Turbine BurnerDocument54 pagesParametric (On-Design) Cycle Analysis For A Separate-Exhaust Turbofan Engine With Interstage Turbine Burnerİlker ÇirkinNo ratings yet
- Revolutionary Propulsion Systems For 21st Century (Sehra Arun K., Shin J.)Document13 pagesRevolutionary Propulsion Systems For 21st Century (Sehra Arun K., Shin J.)tahir sadikovicNo ratings yet
- Modeling Aircraft Wing Loads From Flight Data Using Neural NetworksDocument20 pagesModeling Aircraft Wing Loads From Flight Data Using Neural NetworksPrasath PandianNo ratings yet
- CR 2020 220368Document98 pagesCR 2020 220368anthony colozzaNo ratings yet
- Active Combustion Control For Aircraft Gas-Turbine Engines-Experimental Results For An Advanced, Low-Emissions Combustor PrototypeDocument25 pagesActive Combustion Control For Aircraft Gas-Turbine Engines-Experimental Results For An Advanced, Low-Emissions Combustor PrototypeLuca BozziNo ratings yet
- Hale Uav PDFDocument111 pagesHale Uav PDFhelloyvnNo ratings yet
- Paper 01 - Control DesignDocument20 pagesPaper 01 - Control Designnafayzaman03No ratings yet
- Evaluation of The Oxygen Concentrator Prototypes: Pressure Swing Adsorption Prototype and Electrochemical PrototypeDocument42 pagesEvaluation of The Oxygen Concentrator Prototypes: Pressure Swing Adsorption Prototype and Electrochemical PrototypeAla Ibrahim JalladNo ratings yet
- Nasa CR 2014 218244Document203 pagesNasa CR 2014 218244juan HECTORNo ratings yet
- Ignitor Lox Methane-2.PDF Very GoodDocument28 pagesIgnitor Lox Methane-2.PDF Very GoodGirish UtageNo ratings yet
- Formal Methods Case Studies For DO-333: NASA/CR-2014-218244Document203 pagesFormal Methods Case Studies For DO-333: NASA/CR-2014-218244Jack58No ratings yet
- GRC Supporting Technology For NASA's Advanced Stirling Radioisotope Generator (ASRG)Document19 pagesGRC Supporting Technology For NASA's Advanced Stirling Radioisotope Generator (ASRG)rasoolNo ratings yet
- SkyshipDocument22 pagesSkyshipTasko SadikovicNo ratings yet
- Trace Contaminant Control For The International Space Station's Node 1Document90 pagesTrace Contaminant Control For The International Space Station's Node 1Jin-Su AhnNo ratings yet
- NASA CR-2005-213584 - Vol - 1 PDFDocument330 pagesNASA CR-2005-213584 - Vol - 1 PDFmaurizio.desio4992No ratings yet
- Experimental Performance Evaluation of A High Speed Permanent Magnet Synchronous Motor and Drive For A Flywheel Application at Different FrequenciesDocument13 pagesExperimental Performance Evaluation of A High Speed Permanent Magnet Synchronous Motor and Drive For A Flywheel Application at Different FrequenciesrasoolNo ratings yet
- NASAS CR2 Flywheel Generator - 20060028492Document20 pagesNASAS CR2 Flywheel Generator - 20060028492olim owletNo ratings yet
- Nasa CC3Document332 pagesNasa CC3esra kadriye akgülNo ratings yet
- REview of CFD Methods NASADocument28 pagesREview of CFD Methods NASAaliNo ratings yet
- Axial and Centrifugal Compressor Mean Line Flow Analysis MethodDocument38 pagesAxial and Centrifugal Compressor Mean Line Flow Analysis Methodtadele10No ratings yet
- A Model To Assess The Risk of Ice Accretion Due ToDocument1,666 pagesA Model To Assess The Risk of Ice Accretion Due ToTudorache BogdanNo ratings yet
- Component-Level Electronic-Assembly Repair (CLEAR) Spacecraft Circuit Diagnostics by Analog and Complex Signature AnalysisDocument37 pagesComponent-Level Electronic-Assembly Repair (CLEAR) Spacecraft Circuit Diagnostics by Analog and Complex Signature AnalysisasmonovNo ratings yet
- Mounir A Microfabricated Segmented InvolDocument181 pagesMounir A Microfabricated Segmented InvolDanut StanciuNo ratings yet
- Effects of A Rotating Aerodynamic Probe On The Flow Field of A Compressor RotorDocument27 pagesEffects of A Rotating Aerodynamic Probe On The Flow Field of A Compressor RotorUmair MunirNo ratings yet
- Numerical Study of Outlet Boundary Conditions For Unsteady Turbulent Internal Flows Using The NCCDocument56 pagesNumerical Study of Outlet Boundary Conditions For Unsteady Turbulent Internal Flows Using The NCCAntonio Martín AlcántaraNo ratings yet
- X 43nasa EmaDocument89 pagesX 43nasa EmaFabián AcevedoNo ratings yet
- Final Results For The GRC Supporting Technology Development Project For The 110-Watt Stirling Radioisotope Generator (SRG110)Document24 pagesFinal Results For The GRC Supporting Technology Development Project For The 110-Watt Stirling Radioisotope Generator (SRG110)rasoolNo ratings yet
- Sequential Combustion ModelingDocument24 pagesSequential Combustion ModelingAnu ParthaNo ratings yet
- ADA378073Document10 pagesADA378073leeNo ratings yet
- Application of NiTi in Jet EngineDocument17 pagesApplication of NiTi in Jet Engineswaminathan G.No ratings yet
- Combined Experimental and Numerical Simulations of Thermal Barrier Coated Turbine Blades ErosionDocument28 pagesCombined Experimental and Numerical Simulations of Thermal Barrier Coated Turbine Blades ErosionmoussaouiNo ratings yet
- AD1043317Document22 pagesAD1043317Thakur B PNo ratings yet
- An Alternative Method of Specifying Shock Test Criteria: George C. Marshall Space Flight CenterDocument48 pagesAn Alternative Method of Specifying Shock Test Criteria: George C. Marshall Space Flight Centerqtie87No ratings yet
- System-Level Control Concepts N210026284Document22 pagesSystem-Level Control Concepts N210026284skr2010No ratings yet
- Control of Jet Noise Through Mixing Enhancement: NASA/TM-2003-212335Document15 pagesControl of Jet Noise Through Mixing Enhancement: NASA/TM-2003-212335Maneet KaurNo ratings yet
- The General Aviation Propulsion (GAP) Program: NASA/CR-2008-215266Document65 pagesThe General Aviation Propulsion (GAP) Program: NASA/CR-2008-215266rajeevlochanamNo ratings yet
- Supersonic Free-Jet Combustion in A Ramjet Burner: NASA/TM-2010-216932 AIAA-2010-6643Document32 pagesSupersonic Free-Jet Combustion in A Ramjet Burner: NASA/TM-2010-216932 AIAA-2010-6643AS WI NNo ratings yet
- Materials Selection For Aerospace SystemsDocument75 pagesMaterials Selection For Aerospace SystemsLuis Fernando Roland RicciardiNo ratings yet
- Aerodynamic Characteristics of SC1095 and SC1094 R8 AirfoilsDocument50 pagesAerodynamic Characteristics of SC1095 and SC1094 R8 AirfoilsBuican GeorgeNo ratings yet
- NASA Oxygen Gas Service MaterialDocument26 pagesNASA Oxygen Gas Service MaterialEric VandelindeNo ratings yet
- Investigation of Exoskeletal Engine Propulsion System ConceptDocument93 pagesInvestigation of Exoskeletal Engine Propulsion System ConceptMir yahyaNo ratings yet
- Development of A Thermal Management System For Electrifi Ed AircraftDocument36 pagesDevelopment of A Thermal Management System For Electrifi Ed AircraftCiro Pascarella PrimoNo ratings yet
- Gear and Bearing Fatigue DamageDocument18 pagesGear and Bearing Fatigue DamagemkpqNo ratings yet
- Development of A Turbofan Engine Simulation in A Graphical Simulation EnvironmentDocument19 pagesDevelopment of A Turbofan Engine Simulation in A Graphical Simulation EnvironmentsergukesikNo ratings yet
- LINFLUX-AE: A Turbomachinery Aeroelastic Code Based On A 3-D Linearized Euler SolverDocument42 pagesLINFLUX-AE: A Turbomachinery Aeroelastic Code Based On A 3-D Linearized Euler Solvercerden1998No ratings yet
- Centaur Test Bed (CTB) For Cryogenic Fluid Management: NASA/CR-2006-214410 AIAA-2006-4603Document13 pagesCentaur Test Bed (CTB) For Cryogenic Fluid Management: NASA/CR-2006-214410 AIAA-2006-4603AliNo ratings yet
- Formulation for Observed and Computed Values of Deep Space Network Data Types for NavigationFrom EverandFormulation for Observed and Computed Values of Deep Space Network Data Types for NavigationNo ratings yet
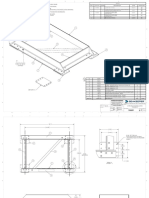
- T-Series JCU Mounting Template 87126-1 WEBDocument2 pagesT-Series JCU Mounting Template 87126-1 WEBAbrham B. GMNo ratings yet
- Manual Mab 206 CentrifugeDocument190 pagesManual Mab 206 CentrifugeAbrham B. GMNo ratings yet
- 10 Seakeeper 26 Bond in Saddle Kit 28jan2021Document1 page10 Seakeeper 26 Bond in Saddle Kit 28jan2021Abrham B. GMNo ratings yet
- GEA Marine Purifiers For Motor Yachts - tcm11-83673Document6 pagesGEA Marine Purifiers For Motor Yachts - tcm11-83673Abrham B. GMNo ratings yet
- TOTALRUBBER - Marine Industry ProductsDocument24 pagesTOTALRUBBER - Marine Industry ProductsAbrham B. GMNo ratings yet
- Manual Mab 104 CentrifugeDocument175 pagesManual Mab 104 CentrifugeAbrham B. GMNo ratings yet
- 4 Seakeeper 26 Hardware Scope of Supply 21aug2020Document1 page4 Seakeeper 26 Hardware Scope of Supply 21aug2020Abrham B. GMNo ratings yet
- Stabilizers: The Ideal Solution To Reduce Rolling MovementDocument4 pagesStabilizers: The Ideal Solution To Reduce Rolling MovementAbrham B. GMNo ratings yet
- Seakeeper 26 Bond in Saddle Kit 28jan2021Document1 pageSeakeeper 26 Bond in Saddle Kit 28jan2021Abrham B. GMNo ratings yet
- Seakeeper 35 26 Installation Fixture Kit Bolt in 24apr2019Document2 pagesSeakeeper 35 26 Installation Fixture Kit Bolt in 24apr2019Abrham B. GMNo ratings yet
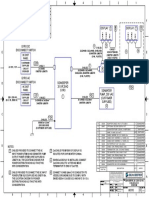
- Rev 6 SEAKEEPER 26 20HD Gyro Cable Block Diagram 08JUL20Document1 pageRev 6 SEAKEEPER 26 20HD Gyro Cable Block Diagram 08JUL20Abrham B. GMNo ratings yet
- A0-A15 Single Hinged Firedoors - SwedenDocument16 pagesA0-A15 Single Hinged Firedoors - SwedenAbrham B. GMNo ratings yet
- Processing of Natural Gas Sweeting DehydDocument142 pagesProcessing of Natural Gas Sweeting DehydAbrham B. GMNo ratings yet
- Electric Vehicles - Modelling and SimulationsDocument478 pagesElectric Vehicles - Modelling and SimulationsJosé Ramírez100% (5)
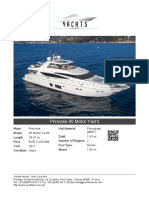
- 29.41m Princess 95 Motor YachtDocument17 pages29.41m Princess 95 Motor YachtAbrham B. GMNo ratings yet
- Power To Get Your Yacht Up To Speed.: MAN Nutzfahrzeuge GroupDocument4 pagesPower To Get Your Yacht Up To Speed.: MAN Nutzfahrzeuge GroupAbrham B. GMNo ratings yet
- Press Brake Productivity Catalog: Order Our Tooling Online!Document116 pagesPress Brake Productivity Catalog: Order Our Tooling Online!Abrham B. GMNo ratings yet
- City of Vancouver: Garbage and Recycling Storage Amenity Design SupplementDocument21 pagesCity of Vancouver: Garbage and Recycling Storage Amenity Design SupplementAbrham B. GMNo ratings yet
- S5-1-2 - Typical Steel Beam DetailsDocument1 pageS5-1-2 - Typical Steel Beam DetailsTony PedaNo ratings yet
- WINCC View SOLAR INVERTERDocument9 pagesWINCC View SOLAR INVERTERKhaled BellegdyNo ratings yet
- Overview of The Real Estate Industry - Evolution and Trends - SAP Flexible Real Estate Management - InglesDocument5 pagesOverview of The Real Estate Industry - Evolution and Trends - SAP Flexible Real Estate Management - InglesAdriano MesadriNo ratings yet
- 253-Article Text-1257-1-10-20210925Document10 pages253-Article Text-1257-1-10-20210925Farhan SyamsuNo ratings yet
- Use Case ModelingDocument10 pagesUse Case ModelingrealsutanNo ratings yet
- ACP Employability WorkshopDocument12 pagesACP Employability Workshoplalit saraswatNo ratings yet
- Technological Institute of The Philippines Course Syllabus: ENGL 253 / 313/293 Technical WritingDocument4 pagesTechnological Institute of The Philippines Course Syllabus: ENGL 253 / 313/293 Technical WritingtipqccagssdNo ratings yet
- Eligion and Edia: Elissa OnroyDocument3 pagesEligion and Edia: Elissa OnroyAltaibaatar JargalNo ratings yet
- Crowding Risk in Smart Beta StrategiesDocument32 pagesCrowding Risk in Smart Beta StrategiesRogerio Monaco SimõesNo ratings yet
- WF Chapt1Document12 pagesWF Chapt1Shinmei KyoshiNo ratings yet
- Mechanical Systems and Signal ProcessingDocument18 pagesMechanical Systems and Signal ProcessingsamueleNo ratings yet
- Done Module Handbook ASIIN - Praktik PlambingDocument3 pagesDone Module Handbook ASIIN - Praktik PlambingM Reza Hasrul, ST, MT FTNo ratings yet
- Book Order FormDocument2 pagesBook Order Formbinaya BehuraNo ratings yet
- 4.25 BLISC Syllabus For CBGSDocument21 pages4.25 BLISC Syllabus For CBGSsubhash.bansode1790No ratings yet
- Treatment of Real Printing Wastewater Using Electrocoagulation Process With Titanium and Zinc ElectrodesDocument9 pagesTreatment of Real Printing Wastewater Using Electrocoagulation Process With Titanium and Zinc ElectrodesCUEVA VASQUEZ BRYAN ALBERTONo ratings yet
- Camera DesignDocument12 pagesCamera DesignSahil TiwariNo ratings yet
- AIM R16 WS02 Rear SpoilerDocument30 pagesAIM R16 WS02 Rear SpoilerAnonymous PJP78mSxNo ratings yet
- Square Footage Facts: 10 Simple References About Home SizeDocument12 pagesSquare Footage Facts: 10 Simple References About Home SizeSteven Randel100% (1)
- H12 211-2Document24 pagesH12 211-2fraesser90% (10)
- Mgtowsolution PDFDocument78 pagesMgtowsolution PDFsmit suman100% (2)
- Buku Keamanan InformasiDocument156 pagesBuku Keamanan InformasiBadruzZamanNo ratings yet
- Should A Person Who Is Brain Dead Be Kept AliveDocument3 pagesShould A Person Who Is Brain Dead Be Kept AliveHaziel PavonNo ratings yet
- Astm F467MDocument9 pagesAstm F467Mhouk sukNo ratings yet
- A Study On Marketing Strategies of LIC Agents With Special Reference To Branches in Madurai DivisionDocument14 pagesA Study On Marketing Strategies of LIC Agents With Special Reference To Branches in Madurai DivisionAjanta BearingNo ratings yet
- David J. A. Clines The Theme of The Pentateuch Jsot Supplement Series, 10 1997 PDFDocument177 pagesDavid J. A. Clines The Theme of The Pentateuch Jsot Supplement Series, 10 1997 PDFVeteris Testamenti Lector100% (14)
- BS 410Document22 pagesBS 410RajaKuppan100% (2)
- Croon's Bias-Corrected Factor Score Path Analysis For Small-To Moderate - Sample Multilevel Structural Equation ModelsDocument23 pagesCroon's Bias-Corrected Factor Score Path Analysis For Small-To Moderate - Sample Multilevel Structural Equation ModelsPhuoc NguyenNo ratings yet
- English Language Lab: Sir C R Reddy College of EngineeringDocument76 pagesEnglish Language Lab: Sir C R Reddy College of EngineeringAbhishek BhanNo ratings yet