
E Gsineering: Synthesis of Schematic Descriptions in Mechanical Design
E Gsineering: Synthesis of Schematic Descriptions in Mechanical Design
You might also like
- Moments of Inertia of Built Up SectionsDocument7 pagesMoments of Inertia of Built Up SectionsKrizelle Manalo0% (1)
- Math 25 Course GuideDocument5 pagesMath 25 Course GuideLyka Jane De Guzman100% (2)
- Artificial Evolution and ElectronicsDocument12 pagesArtificial Evolution and ElectronicsretonNo ratings yet
- Cyclic Symmetry TopicsDocument73 pagesCyclic Symmetry TopicsMoisés MachadoNo ratings yet
- Theory and Ap : Printed in U. 8. ADocument8 pagesTheory and Ap : Printed in U. 8. AromalfioNo ratings yet
- A Novel Method For Analysing The Fractal Fractional Integrator CircuitDocument9 pagesA Novel Method For Analysing The Fractal Fractional Integrator CircuitM. PriyaNo ratings yet
- 2742060.2742063-Non Restoring DividerDocument6 pages2742060.2742063-Non Restoring DividerKAVIYA DIASNo ratings yet
- Use of Test Structures For Characterization and Modeling of Inter-And Intra-Layer Capacitances in A CMOS ProcessDocument9 pagesUse of Test Structures For Characterization and Modeling of Inter-And Intra-Layer Capacitances in A CMOS ProcessAlex WongNo ratings yet
- The Sizing Rules Method For Analog Integrated Circuit Design - Computer Aided Design, 2001. ICCAD 2001. IEEE - ACM International Conference OnDocument7 pagesThe Sizing Rules Method For Analog Integrated Circuit Design - Computer Aided Design, 2001. ICCAD 2001. IEEE - ACM International Conference Onfayazbaba1236No ratings yet
- Assembly Line BalancingDocument11 pagesAssembly Line BalancingArkady Hafizh RamadhanNo ratings yet
- Kinematic Analysis MethodDocument14 pagesKinematic Analysis Method김동은No ratings yet
- A Novel Approach For Automatic Common-Centroid Pattern GenerationDocument5 pagesA Novel Approach For Automatic Common-Centroid Pattern GenerationsatyajitNo ratings yet
- Applying Continuum Design Sensitivity AnalysisDocument4 pagesApplying Continuum Design Sensitivity Analysismarcin.ziolkowski.55No ratings yet
- Once, 6: Inotor A-Connected, 6Document8 pagesOnce, 6: Inotor A-Connected, 6Amit sahaNo ratings yet
- GM Vs Id Design FlowDocument5 pagesGM Vs Id Design Flowapi-19755952No ratings yet
- 34-High-Speed Power System Stability Simulation Using Analog Computation Systematic Error AnalysisDocument5 pages34-High-Speed Power System Stability Simulation Using Analog Computation Systematic Error AnalysisZyad GhaziNo ratings yet
- Afrocon 04 KerenDocument6 pagesAfrocon 04 KerenJuanLojaObregonNo ratings yet
- Dynamic Power and Signal Integrity Analysis For Chip-Package-Board Co-Design and Co-SimulationDocument4 pagesDynamic Power and Signal Integrity Analysis For Chip-Package-Board Co-Design and Co-SimulationApikShafieeNo ratings yet
- Power Transmissions DesignDocument18 pagesPower Transmissions DesignFabián AcevedoNo ratings yet
- Degrees of FreedomDocument9 pagesDegrees of FreedomAsheesh SharmaNo ratings yet
- Kitamura1999. An Approach To The Emergent Design Theory and Applications PDFDocument4 pagesKitamura1999. An Approach To The Emergent Design Theory and Applications PDFAmilcar MagaçoNo ratings yet
- Power Constrained Design Optimization of Analog Circuits Based On Physical Gm/i CharacteristicsDocument7 pagesPower Constrained Design Optimization of Analog Circuits Based On Physical Gm/i CharacteristicsNanda KumarNo ratings yet
- Final Exam Review: This Is A List of The Topic Covered in The CourseDocument2 pagesFinal Exam Review: This Is A List of The Topic Covered in The CoursejkmaroNo ratings yet
- Proceedings of The Institution of Electrical Engineers Volume 117 Issue 7 1970 (Doi 10.1049 - Piee.1970.0244) Chalmers, B.JDocument7 pagesProceedings of The Institution of Electrical Engineers Volume 117 Issue 7 1970 (Doi 10.1049 - Piee.1970.0244) Chalmers, B.JcontenteeeNo ratings yet
- Vibration Characteristic Analysis of Axial Fan Shell Based On ANSYS WorkbenchDocument5 pagesVibration Characteristic Analysis of Axial Fan Shell Based On ANSYS WorkbenchSeran KrishnamoorthyNo ratings yet
- PSS Lab Manual2019Document107 pagesPSS Lab Manual2019Mohammed sabeelNo ratings yet
- Educational UEDUCATIONAL USE OF PSCAD/EMTDC MODELS FOR EVALUATING DIGITAL PROTECTIVE RELAYSseDocument7 pagesEducational UEDUCATIONAL USE OF PSCAD/EMTDC MODELS FOR EVALUATING DIGITAL PROTECTIVE RELAYSseIASCNo ratings yet
- Assignment 1 Computer-Aided Design of Analog Circuits: InstructionsDocument4 pagesAssignment 1 Computer-Aided Design of Analog Circuits: Instructionsabhishek raoNo ratings yet
- Orthogonal 20 Distance 20 Fitting 20 of 20 Implicit 20 Curves 20 and 20 SurfacesDocument20 pagesOrthogonal 20 Distance 20 Fitting 20 of 20 Implicit 20 Curves 20 and 20 SurfacesjoseramirezNo ratings yet
- 15 - Analytical Loss Model of Power Mosfet PDFDocument10 pages15 - Analytical Loss Model of Power Mosfet PDFWesley de PaulaNo ratings yet
- Dynamic Harmonic Evolution Using The Extended Harmonic DomainDocument9 pagesDynamic Harmonic Evolution Using The Extended Harmonic DomainRyan John RiveraNo ratings yet
- Modeling and Simulation of Insulated-Gate Field-Effect Transistors - Shichman1968 PDFDocument5 pagesModeling and Simulation of Insulated-Gate Field-Effect Transistors - Shichman1968 PDFWilliam ccorquiNo ratings yet
- 用于计算机辅助设计和优化的通用 Active-RC 滤波器模型Document12 pages用于计算机辅助设计和优化的通用 Active-RC 滤波器模型4671 WenNo ratings yet
- Dstatcom ThesisDocument8 pagesDstatcom Thesisbnjkstgig100% (3)
- A4 Vovos Amathematicalmodelfordynamic....Document10 pagesA4 Vovos Amathematicalmodelfordynamic....Tharun KumarNo ratings yet
- Lecture 1 3Document62 pagesLecture 1 3Sivakumar PothirajNo ratings yet
- Winter - 18 Examination Subject Name: Mechatronics Model Answer Subject CodeDocument39 pagesWinter - 18 Examination Subject Name: Mechatronics Model Answer Subject CodeManisha SuryawanshiNo ratings yet
- Simulation of Six Phase Permanent Magnet Synchronous Generator in MATLABDocument5 pagesSimulation of Six Phase Permanent Magnet Synchronous Generator in MATLABجمال ضيفيNo ratings yet
- Simulation in Mobile Hydraulics: CostsDocument13 pagesSimulation in Mobile Hydraulics: CostsxxshNo ratings yet
- Analyses of Static and Dynamic Random Offset Voltages in Dynamic ComparatorsDocument10 pagesAnalyses of Static and Dynamic Random Offset Voltages in Dynamic Comparatorsleileilei65No ratings yet
- Integration of Saber Simulation Results Into The Cadence Framework Database by Using The Cell Property FeatureDocument4 pagesIntegration of Saber Simulation Results Into The Cadence Framework Database by Using The Cell Property FeatureDung TranNo ratings yet
- Power System Dynamic Response Calculations: in M Each Involves in PerhapsDocument23 pagesPower System Dynamic Response Calculations: in M Each Involves in Perhapsjuan LuisNo ratings yet
- ABB Review NR 3 2013Document84 pagesABB Review NR 3 2013sorin1gunnerNo ratings yet
- CAF 1241 Corrections FinalDocument16 pagesCAF 1241 Corrections Finalbinny21dream5978No ratings yet
- Cliszkay,+production+editor,+09 PPTR 12908 PDocument5 pagesCliszkay,+production+editor,+09 PPTR 12908 Pamezianegoulmane200No ratings yet
- Pertusa 1995Document5 pagesPertusa 1995Jose Fernando Bastos ZayasNo ratings yet
- A 4-Ghz 130-Nm Address Generation Unit With 32-Bit Sparse-Tree Adder CoreDocument7 pagesA 4-Ghz 130-Nm Address Generation Unit With 32-Bit Sparse-Tree Adder CoreSubodh SinghalNo ratings yet
- Alternative SPICE Implementation of Circuit Uncertainties Based On Orthogonal PolynomialsDocument4 pagesAlternative SPICE Implementation of Circuit Uncertainties Based On Orthogonal Polynomialsxenaman17No ratings yet
- Reliability of Euler-Bernoulli Model For Multilayer Composite Piezoelectric BeamsDocument7 pagesReliability of Euler-Bernoulli Model For Multilayer Composite Piezoelectric Beamseren onatNo ratings yet
- Development of Dynamic Test Cases in OPAL-RT Real-Time Power System SimulatorDocument6 pagesDevelopment of Dynamic Test Cases in OPAL-RT Real-Time Power System SimulatortabendaaarzuNo ratings yet
- Introduction To Behavioral ModelingDocument5 pagesIntroduction To Behavioral ModelingRakotomalala Mamy TianaNo ratings yet
- X X X X X X X X X X X V: Necdet Sinan Özbek Engineering Science and Technology, An International Journal 35 (2022) 101212Document1 pageX X X X X X X X X X X V: Necdet Sinan Özbek Engineering Science and Technology, An International Journal 35 (2022) 101212paxesicrado-3649No ratings yet
- Ecp 15118117Document9 pagesEcp 15118117sudhansu samalNo ratings yet
- 5.g 94 - ANN Based Modeling, Testing, and Diagnosis of MEMSDocument7 pages5.g 94 - ANN Based Modeling, Testing, and Diagnosis of MEMSVančo LitovskiNo ratings yet
- Design Analysis of Industrial Gear Box Casing.: International Research Journal of Engineering and Technology (IRJET)Document5 pagesDesign Analysis of Industrial Gear Box Casing.: International Research Journal of Engineering and Technology (IRJET)Akash NandargiNo ratings yet
- Multi-Machine Signal Stability Analysis For Power System: January 2018Document6 pagesMulti-Machine Signal Stability Analysis For Power System: January 2018Mohd Mohsin KhanNo ratings yet
- Multi-Machine Signal Stability Analysis For Power System: January 2018Document6 pagesMulti-Machine Signal Stability Analysis For Power System: January 2018Mohd Mohsin KhanNo ratings yet
- Power Constrained Design Optimization of Analog Circuits Based On Physical Gm/i CharacteristicsDocument7 pagesPower Constrained Design Optimization of Analog Circuits Based On Physical Gm/i CharacteristicsAn HoaNo ratings yet
- Local Search Methods For Design in AeronauticsDocument47 pagesLocal Search Methods For Design in AeronauticsReyMysterioNo ratings yet
- FE Simulation of HoneycombDocument5 pagesFE Simulation of HoneycombManoj KumarNo ratings yet
- Finite Elements for Truss and Frame Structures: An Introduction Based on the Computer Algebra System MaximaFrom EverandFinite Elements for Truss and Frame Structures: An Introduction Based on the Computer Algebra System MaximaNo ratings yet
- Vasin2020 Article StructureAndPhaseFormationMechDocument6 pagesVasin2020 Article StructureAndPhaseFormationMechNeeleshNo ratings yet
- Instructions To The Candidate: Examination Centre: Centre Code: 5023 ID Number: Photo IDDocument1 pageInstructions To The Candidate: Examination Centre: Centre Code: 5023 ID Number: Photo IDNeeleshNo ratings yet
- Call Up Letter Sce Allahabad For SSC Tech 56 CourseDocument21 pagesCall Up Letter Sce Allahabad For SSC Tech 56 CourseNeeleshNo ratings yet
- Eligibility For Admission PGDM 2021-23Document2 pagesEligibility For Admission PGDM 2021-23NeeleshNo ratings yet
- Hydraulic Machines Turbines and Pumps 2ed G I Krivchenko IsBN 1566700019 Lewis PublishersDocument406 pagesHydraulic Machines Turbines and Pumps 2ed G I Krivchenko IsBN 1566700019 Lewis PublishersNeeleshNo ratings yet
- Business Rules For Admission 2021-2022 (All Degree and Diploma Programmes Other Than JRF Programmes)Document8 pagesBusiness Rules For Admission 2021-2022 (All Degree and Diploma Programmes Other Than JRF Programmes)NeeleshNo ratings yet
- Qualification, No of Posts & Stipend:: EligibilityDocument3 pagesQualification, No of Posts & Stipend:: EligibilityNeeleshNo ratings yet
- 26782MT (T) 2020 Results - ExternalDocument18 pages26782MT (T) 2020 Results - ExternalNeeleshNo ratings yet
- To Be Read in Conjunction With The Notification ForDocument19 pagesTo Be Read in Conjunction With The Notification ForNeeleshNo ratings yet
- Blajer 1997Document19 pagesBlajer 1997NeeleshNo ratings yet
- Government of India, Ministry of Defence: Advertisement No. - ADE-GTRE/Aprntc/2019Document2 pagesGovernment of India, Ministry of Defence: Advertisement No. - ADE-GTRE/Aprntc/2019NeeleshNo ratings yet
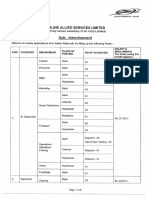
- Airline Allied Services Limited: Sub: AdvertisementDocument9 pagesAirline Allied Services Limited: Sub: AdvertisementNeeleshNo ratings yet
- Miniature Free-Piston Homogeneous Charge Compression Ignition Engine-Compressor Concept-Part I: Performance Estimation and Design Considerations Unique To Small DimensionsDocument11 pagesMiniature Free-Piston Homogeneous Charge Compression Ignition Engine-Compressor Concept-Part I: Performance Estimation and Design Considerations Unique To Small DimensionsNeeleshNo ratings yet
- National Apprenticeship Training Scheme (NATS) PDFDocument2 pagesNational Apprenticeship Training Scheme (NATS) PDFNeeleshNo ratings yet
- 0069 SelectProcedure PDFDocument1 page0069 SelectProcedure PDFNeeleshNo ratings yet
- National Apprenticeship Training Scheme (NATS) PDFDocument2 pagesNational Apprenticeship Training Scheme (NATS) PDFNeeleshNo ratings yet
- National Apprenticeship Training Scheme (NATS)Document2 pagesNational Apprenticeship Training Scheme (NATS)NeeleshNo ratings yet
- II.4.b DensityLabDocument4 pagesII.4.b DensityLababby tafesseNo ratings yet
- Name: Intan Cahya Putri Lestari Class: XI Ipa 1Document6 pagesName: Intan Cahya Putri Lestari Class: XI Ipa 1Intancahya PutrilestariNo ratings yet
- Technical Datasheet - Solumer 871 - EngDocument1 pageTechnical Datasheet - Solumer 871 - EngCristhian Villegas OrtizNo ratings yet
- Jim Baggott - The Quantum Cookbook - Mathematical Recipes For The Foundations of Quantum Mechanics (2020, Oxford University Press)Document314 pagesJim Baggott - The Quantum Cookbook - Mathematical Recipes For The Foundations of Quantum Mechanics (2020, Oxford University Press)Michael LaugierNo ratings yet
- Lesson Plan in Earth and Life Science 12Document2 pagesLesson Plan in Earth and Life Science 12Ryl MitchNo ratings yet
- OTIS ExcerptsDocument265 pagesOTIS ExcerptsMuhammad TaufanNo ratings yet
- 2 - Macarthur - Levins 1967 The Limiting Similarity, ConvergenceDocument9 pages2 - Macarthur - Levins 1967 The Limiting Similarity, ConvergenceAnna de Oliveira SilvaNo ratings yet
- Reinforcing Steel Passivation in Mortar and Pore SolutionDocument7 pagesReinforcing Steel Passivation in Mortar and Pore SolutionMaura Arroyo OlveraNo ratings yet
- DPP - 01 - ElectrostaticsDocument4 pagesDPP - 01 - ElectrostaticsPubg prakhar PrakharNo ratings yet
- Maths PP1 Kcse Cluster PredDocument34 pagesMaths PP1 Kcse Cluster PredBonface Kenani100% (1)
- SEM Pure Sno2 ImageDocument5 pagesSEM Pure Sno2 Images khatakNo ratings yet
- Agril - Engg.syllbus DetailsDocument55 pagesAgril - Engg.syllbus DetailsVikas VikkiNo ratings yet
- Thermal Analysis ReportDocument17 pagesThermal Analysis ReportGaurav GayakeNo ratings yet
- 6 Shallow FoundationDocument55 pages6 Shallow FoundationFenil ShuklaNo ratings yet
- 5D RegularizationDocument8 pages5D Regularizationmustaphadz76No ratings yet
- Fit Tolerance For Plastic PartsDocument16 pagesFit Tolerance For Plastic PartsA_JANNESNo ratings yet
- Prediction and Analysis of Gear Rattle: Development TransmissionsDocument5 pagesPrediction and Analysis of Gear Rattle: Development TransmissionssmsnvhNo ratings yet
- Physics Notes Fbise FSC 2 CHAPTER - 18 THE ATOMIC SPECTRADocument5 pagesPhysics Notes Fbise FSC 2 CHAPTER - 18 THE ATOMIC SPECTRAflyfalconNo ratings yet
- Nominal Engineering Properties of Ryton R-4: Data SheetDocument4 pagesNominal Engineering Properties of Ryton R-4: Data SheetRakeshNo ratings yet
- Computer Experiments On Classical Fluids. I. Thermodynamical Properties of Lennard-Jones MoleculesDocument6 pagesComputer Experiments On Classical Fluids. I. Thermodynamical Properties of Lennard-Jones MoleculesLorem IpsumNo ratings yet
- Bitsat 2018ques PDFDocument34 pagesBitsat 2018ques PDFDilfonNo ratings yet
- Math 46 Sample MidtermDocument2 pagesMath 46 Sample MidtermMt RushNo ratings yet
- Mathematics: Daily Practice ProblemsDocument2 pagesMathematics: Daily Practice Problemsmanoj sharmaNo ratings yet
- Aggregate Crushing Value: IS: 2386 (Part IV) - 1963)Document1 pageAggregate Crushing Value: IS: 2386 (Part IV) - 1963)SANJAY KUMAR SINGHNo ratings yet
- GENESTAR™ GP2300S - KurarayDocument4 pagesGENESTAR™ GP2300S - KurarayRafael CastroNo ratings yet
- Earth Pressure Calculations 2Document7 pagesEarth Pressure Calculations 2RAJAT SHARMANo ratings yet
- Lab 2Document16 pagesLab 2KINGS entertainment KHANNo ratings yet








































































































Download as pdf or txt
You might also like
- Moments of Inertia of Built Up SectionsDocument7 pagesMoments of Inertia of Built Up SectionsKrizelle Manalo0% (1)
- Math 25 Course GuideDocument5 pagesMath 25 Course GuideLyka Jane De Guzman100% (2)
- Artificial Evolution and ElectronicsDocument12 pagesArtificial Evolution and ElectronicsretonNo ratings yet
- Cyclic Symmetry TopicsDocument73 pagesCyclic Symmetry TopicsMoisés MachadoNo ratings yet
- Theory and Ap : Printed in U. 8. ADocument8 pagesTheory and Ap : Printed in U. 8. AromalfioNo ratings yet
- A Novel Method For Analysing The Fractal Fractional Integrator CircuitDocument9 pagesA Novel Method For Analysing The Fractal Fractional Integrator CircuitM. PriyaNo ratings yet
- 2742060.2742063-Non Restoring DividerDocument6 pages2742060.2742063-Non Restoring DividerKAVIYA DIASNo ratings yet
- Use of Test Structures For Characterization and Modeling of Inter-And Intra-Layer Capacitances in A CMOS ProcessDocument9 pagesUse of Test Structures For Characterization and Modeling of Inter-And Intra-Layer Capacitances in A CMOS ProcessAlex WongNo ratings yet
- The Sizing Rules Method For Analog Integrated Circuit Design - Computer Aided Design, 2001. ICCAD 2001. IEEE - ACM International Conference OnDocument7 pagesThe Sizing Rules Method For Analog Integrated Circuit Design - Computer Aided Design, 2001. ICCAD 2001. IEEE - ACM International Conference Onfayazbaba1236No ratings yet
- Assembly Line BalancingDocument11 pagesAssembly Line BalancingArkady Hafizh RamadhanNo ratings yet
- Kinematic Analysis MethodDocument14 pagesKinematic Analysis Method김동은No ratings yet
- A Novel Approach For Automatic Common-Centroid Pattern GenerationDocument5 pagesA Novel Approach For Automatic Common-Centroid Pattern GenerationsatyajitNo ratings yet
- Applying Continuum Design Sensitivity AnalysisDocument4 pagesApplying Continuum Design Sensitivity Analysismarcin.ziolkowski.55No ratings yet
- Once, 6: Inotor A-Connected, 6Document8 pagesOnce, 6: Inotor A-Connected, 6Amit sahaNo ratings yet
- GM Vs Id Design FlowDocument5 pagesGM Vs Id Design Flowapi-19755952No ratings yet
- 34-High-Speed Power System Stability Simulation Using Analog Computation Systematic Error AnalysisDocument5 pages34-High-Speed Power System Stability Simulation Using Analog Computation Systematic Error AnalysisZyad GhaziNo ratings yet
- Afrocon 04 KerenDocument6 pagesAfrocon 04 KerenJuanLojaObregonNo ratings yet
- Dynamic Power and Signal Integrity Analysis For Chip-Package-Board Co-Design and Co-SimulationDocument4 pagesDynamic Power and Signal Integrity Analysis For Chip-Package-Board Co-Design and Co-SimulationApikShafieeNo ratings yet
- Power Transmissions DesignDocument18 pagesPower Transmissions DesignFabián AcevedoNo ratings yet
- Degrees of FreedomDocument9 pagesDegrees of FreedomAsheesh SharmaNo ratings yet
- Kitamura1999. An Approach To The Emergent Design Theory and Applications PDFDocument4 pagesKitamura1999. An Approach To The Emergent Design Theory and Applications PDFAmilcar MagaçoNo ratings yet
- Power Constrained Design Optimization of Analog Circuits Based On Physical Gm/i CharacteristicsDocument7 pagesPower Constrained Design Optimization of Analog Circuits Based On Physical Gm/i CharacteristicsNanda KumarNo ratings yet
- Final Exam Review: This Is A List of The Topic Covered in The CourseDocument2 pagesFinal Exam Review: This Is A List of The Topic Covered in The CoursejkmaroNo ratings yet
- Proceedings of The Institution of Electrical Engineers Volume 117 Issue 7 1970 (Doi 10.1049 - Piee.1970.0244) Chalmers, B.JDocument7 pagesProceedings of The Institution of Electrical Engineers Volume 117 Issue 7 1970 (Doi 10.1049 - Piee.1970.0244) Chalmers, B.JcontenteeeNo ratings yet
- Vibration Characteristic Analysis of Axial Fan Shell Based On ANSYS WorkbenchDocument5 pagesVibration Characteristic Analysis of Axial Fan Shell Based On ANSYS WorkbenchSeran KrishnamoorthyNo ratings yet
- PSS Lab Manual2019Document107 pagesPSS Lab Manual2019Mohammed sabeelNo ratings yet
- Educational UEDUCATIONAL USE OF PSCAD/EMTDC MODELS FOR EVALUATING DIGITAL PROTECTIVE RELAYSseDocument7 pagesEducational UEDUCATIONAL USE OF PSCAD/EMTDC MODELS FOR EVALUATING DIGITAL PROTECTIVE RELAYSseIASCNo ratings yet
- Assignment 1 Computer-Aided Design of Analog Circuits: InstructionsDocument4 pagesAssignment 1 Computer-Aided Design of Analog Circuits: Instructionsabhishek raoNo ratings yet
- Orthogonal 20 Distance 20 Fitting 20 of 20 Implicit 20 Curves 20 and 20 SurfacesDocument20 pagesOrthogonal 20 Distance 20 Fitting 20 of 20 Implicit 20 Curves 20 and 20 SurfacesjoseramirezNo ratings yet
- 15 - Analytical Loss Model of Power Mosfet PDFDocument10 pages15 - Analytical Loss Model of Power Mosfet PDFWesley de PaulaNo ratings yet
- Dynamic Harmonic Evolution Using The Extended Harmonic DomainDocument9 pagesDynamic Harmonic Evolution Using The Extended Harmonic DomainRyan John RiveraNo ratings yet
- Modeling and Simulation of Insulated-Gate Field-Effect Transistors - Shichman1968 PDFDocument5 pagesModeling and Simulation of Insulated-Gate Field-Effect Transistors - Shichman1968 PDFWilliam ccorquiNo ratings yet
- 用于计算机辅助设计和优化的通用 Active-RC 滤波器模型Document12 pages用于计算机辅助设计和优化的通用 Active-RC 滤波器模型4671 WenNo ratings yet
- Dstatcom ThesisDocument8 pagesDstatcom Thesisbnjkstgig100% (3)
- A4 Vovos Amathematicalmodelfordynamic....Document10 pagesA4 Vovos Amathematicalmodelfordynamic....Tharun KumarNo ratings yet
- Lecture 1 3Document62 pagesLecture 1 3Sivakumar PothirajNo ratings yet
- Winter - 18 Examination Subject Name: Mechatronics Model Answer Subject CodeDocument39 pagesWinter - 18 Examination Subject Name: Mechatronics Model Answer Subject CodeManisha SuryawanshiNo ratings yet
- Simulation of Six Phase Permanent Magnet Synchronous Generator in MATLABDocument5 pagesSimulation of Six Phase Permanent Magnet Synchronous Generator in MATLABجمال ضيفيNo ratings yet
- Simulation in Mobile Hydraulics: CostsDocument13 pagesSimulation in Mobile Hydraulics: CostsxxshNo ratings yet
- Analyses of Static and Dynamic Random Offset Voltages in Dynamic ComparatorsDocument10 pagesAnalyses of Static and Dynamic Random Offset Voltages in Dynamic Comparatorsleileilei65No ratings yet
- Integration of Saber Simulation Results Into The Cadence Framework Database by Using The Cell Property FeatureDocument4 pagesIntegration of Saber Simulation Results Into The Cadence Framework Database by Using The Cell Property FeatureDung TranNo ratings yet
- Power System Dynamic Response Calculations: in M Each Involves in PerhapsDocument23 pagesPower System Dynamic Response Calculations: in M Each Involves in Perhapsjuan LuisNo ratings yet
- ABB Review NR 3 2013Document84 pagesABB Review NR 3 2013sorin1gunnerNo ratings yet
- CAF 1241 Corrections FinalDocument16 pagesCAF 1241 Corrections Finalbinny21dream5978No ratings yet
- Cliszkay,+production+editor,+09 PPTR 12908 PDocument5 pagesCliszkay,+production+editor,+09 PPTR 12908 Pamezianegoulmane200No ratings yet
- Pertusa 1995Document5 pagesPertusa 1995Jose Fernando Bastos ZayasNo ratings yet
- A 4-Ghz 130-Nm Address Generation Unit With 32-Bit Sparse-Tree Adder CoreDocument7 pagesA 4-Ghz 130-Nm Address Generation Unit With 32-Bit Sparse-Tree Adder CoreSubodh SinghalNo ratings yet
- Alternative SPICE Implementation of Circuit Uncertainties Based On Orthogonal PolynomialsDocument4 pagesAlternative SPICE Implementation of Circuit Uncertainties Based On Orthogonal Polynomialsxenaman17No ratings yet
- Reliability of Euler-Bernoulli Model For Multilayer Composite Piezoelectric BeamsDocument7 pagesReliability of Euler-Bernoulli Model For Multilayer Composite Piezoelectric Beamseren onatNo ratings yet
- Development of Dynamic Test Cases in OPAL-RT Real-Time Power System SimulatorDocument6 pagesDevelopment of Dynamic Test Cases in OPAL-RT Real-Time Power System SimulatortabendaaarzuNo ratings yet
- Introduction To Behavioral ModelingDocument5 pagesIntroduction To Behavioral ModelingRakotomalala Mamy TianaNo ratings yet
- X X X X X X X X X X X V: Necdet Sinan Özbek Engineering Science and Technology, An International Journal 35 (2022) 101212Document1 pageX X X X X X X X X X X V: Necdet Sinan Özbek Engineering Science and Technology, An International Journal 35 (2022) 101212paxesicrado-3649No ratings yet
- Ecp 15118117Document9 pagesEcp 15118117sudhansu samalNo ratings yet
- 5.g 94 - ANN Based Modeling, Testing, and Diagnosis of MEMSDocument7 pages5.g 94 - ANN Based Modeling, Testing, and Diagnosis of MEMSVančo LitovskiNo ratings yet
- Design Analysis of Industrial Gear Box Casing.: International Research Journal of Engineering and Technology (IRJET)Document5 pagesDesign Analysis of Industrial Gear Box Casing.: International Research Journal of Engineering and Technology (IRJET)Akash NandargiNo ratings yet
- Multi-Machine Signal Stability Analysis For Power System: January 2018Document6 pagesMulti-Machine Signal Stability Analysis For Power System: January 2018Mohd Mohsin KhanNo ratings yet
- Multi-Machine Signal Stability Analysis For Power System: January 2018Document6 pagesMulti-Machine Signal Stability Analysis For Power System: January 2018Mohd Mohsin KhanNo ratings yet
- Power Constrained Design Optimization of Analog Circuits Based On Physical Gm/i CharacteristicsDocument7 pagesPower Constrained Design Optimization of Analog Circuits Based On Physical Gm/i CharacteristicsAn HoaNo ratings yet
- Local Search Methods For Design in AeronauticsDocument47 pagesLocal Search Methods For Design in AeronauticsReyMysterioNo ratings yet
- FE Simulation of HoneycombDocument5 pagesFE Simulation of HoneycombManoj KumarNo ratings yet
- Finite Elements for Truss and Frame Structures: An Introduction Based on the Computer Algebra System MaximaFrom EverandFinite Elements for Truss and Frame Structures: An Introduction Based on the Computer Algebra System MaximaNo ratings yet
- Vasin2020 Article StructureAndPhaseFormationMechDocument6 pagesVasin2020 Article StructureAndPhaseFormationMechNeeleshNo ratings yet
- Instructions To The Candidate: Examination Centre: Centre Code: 5023 ID Number: Photo IDDocument1 pageInstructions To The Candidate: Examination Centre: Centre Code: 5023 ID Number: Photo IDNeeleshNo ratings yet
- Call Up Letter Sce Allahabad For SSC Tech 56 CourseDocument21 pagesCall Up Letter Sce Allahabad For SSC Tech 56 CourseNeeleshNo ratings yet
- Eligibility For Admission PGDM 2021-23Document2 pagesEligibility For Admission PGDM 2021-23NeeleshNo ratings yet
- Hydraulic Machines Turbines and Pumps 2ed G I Krivchenko IsBN 1566700019 Lewis PublishersDocument406 pagesHydraulic Machines Turbines and Pumps 2ed G I Krivchenko IsBN 1566700019 Lewis PublishersNeeleshNo ratings yet
- Business Rules For Admission 2021-2022 (All Degree and Diploma Programmes Other Than JRF Programmes)Document8 pagesBusiness Rules For Admission 2021-2022 (All Degree and Diploma Programmes Other Than JRF Programmes)NeeleshNo ratings yet
- Qualification, No of Posts & Stipend:: EligibilityDocument3 pagesQualification, No of Posts & Stipend:: EligibilityNeeleshNo ratings yet
- 26782MT (T) 2020 Results - ExternalDocument18 pages26782MT (T) 2020 Results - ExternalNeeleshNo ratings yet
- To Be Read in Conjunction With The Notification ForDocument19 pagesTo Be Read in Conjunction With The Notification ForNeeleshNo ratings yet
- Blajer 1997Document19 pagesBlajer 1997NeeleshNo ratings yet
- Government of India, Ministry of Defence: Advertisement No. - ADE-GTRE/Aprntc/2019Document2 pagesGovernment of India, Ministry of Defence: Advertisement No. - ADE-GTRE/Aprntc/2019NeeleshNo ratings yet
- Airline Allied Services Limited: Sub: AdvertisementDocument9 pagesAirline Allied Services Limited: Sub: AdvertisementNeeleshNo ratings yet
- Miniature Free-Piston Homogeneous Charge Compression Ignition Engine-Compressor Concept-Part I: Performance Estimation and Design Considerations Unique To Small DimensionsDocument11 pagesMiniature Free-Piston Homogeneous Charge Compression Ignition Engine-Compressor Concept-Part I: Performance Estimation and Design Considerations Unique To Small DimensionsNeeleshNo ratings yet
- National Apprenticeship Training Scheme (NATS) PDFDocument2 pagesNational Apprenticeship Training Scheme (NATS) PDFNeeleshNo ratings yet
- 0069 SelectProcedure PDFDocument1 page0069 SelectProcedure PDFNeeleshNo ratings yet
- National Apprenticeship Training Scheme (NATS) PDFDocument2 pagesNational Apprenticeship Training Scheme (NATS) PDFNeeleshNo ratings yet
- National Apprenticeship Training Scheme (NATS)Document2 pagesNational Apprenticeship Training Scheme (NATS)NeeleshNo ratings yet
- II.4.b DensityLabDocument4 pagesII.4.b DensityLababby tafesseNo ratings yet
- Name: Intan Cahya Putri Lestari Class: XI Ipa 1Document6 pagesName: Intan Cahya Putri Lestari Class: XI Ipa 1Intancahya PutrilestariNo ratings yet
- Technical Datasheet - Solumer 871 - EngDocument1 pageTechnical Datasheet - Solumer 871 - EngCristhian Villegas OrtizNo ratings yet
- Jim Baggott - The Quantum Cookbook - Mathematical Recipes For The Foundations of Quantum Mechanics (2020, Oxford University Press)Document314 pagesJim Baggott - The Quantum Cookbook - Mathematical Recipes For The Foundations of Quantum Mechanics (2020, Oxford University Press)Michael LaugierNo ratings yet
- Lesson Plan in Earth and Life Science 12Document2 pagesLesson Plan in Earth and Life Science 12Ryl MitchNo ratings yet
- OTIS ExcerptsDocument265 pagesOTIS ExcerptsMuhammad TaufanNo ratings yet
- 2 - Macarthur - Levins 1967 The Limiting Similarity, ConvergenceDocument9 pages2 - Macarthur - Levins 1967 The Limiting Similarity, ConvergenceAnna de Oliveira SilvaNo ratings yet
- Reinforcing Steel Passivation in Mortar and Pore SolutionDocument7 pagesReinforcing Steel Passivation in Mortar and Pore SolutionMaura Arroyo OlveraNo ratings yet
- DPP - 01 - ElectrostaticsDocument4 pagesDPP - 01 - ElectrostaticsPubg prakhar PrakharNo ratings yet
- Maths PP1 Kcse Cluster PredDocument34 pagesMaths PP1 Kcse Cluster PredBonface Kenani100% (1)
- SEM Pure Sno2 ImageDocument5 pagesSEM Pure Sno2 Images khatakNo ratings yet
- Agril - Engg.syllbus DetailsDocument55 pagesAgril - Engg.syllbus DetailsVikas VikkiNo ratings yet
- Thermal Analysis ReportDocument17 pagesThermal Analysis ReportGaurav GayakeNo ratings yet
- 6 Shallow FoundationDocument55 pages6 Shallow FoundationFenil ShuklaNo ratings yet
- 5D RegularizationDocument8 pages5D Regularizationmustaphadz76No ratings yet
- Fit Tolerance For Plastic PartsDocument16 pagesFit Tolerance For Plastic PartsA_JANNESNo ratings yet
- Prediction and Analysis of Gear Rattle: Development TransmissionsDocument5 pagesPrediction and Analysis of Gear Rattle: Development TransmissionssmsnvhNo ratings yet
- Physics Notes Fbise FSC 2 CHAPTER - 18 THE ATOMIC SPECTRADocument5 pagesPhysics Notes Fbise FSC 2 CHAPTER - 18 THE ATOMIC SPECTRAflyfalconNo ratings yet
- Nominal Engineering Properties of Ryton R-4: Data SheetDocument4 pagesNominal Engineering Properties of Ryton R-4: Data SheetRakeshNo ratings yet
- Computer Experiments On Classical Fluids. I. Thermodynamical Properties of Lennard-Jones MoleculesDocument6 pagesComputer Experiments On Classical Fluids. I. Thermodynamical Properties of Lennard-Jones MoleculesLorem IpsumNo ratings yet
- Bitsat 2018ques PDFDocument34 pagesBitsat 2018ques PDFDilfonNo ratings yet
- Math 46 Sample MidtermDocument2 pagesMath 46 Sample MidtermMt RushNo ratings yet
- Mathematics: Daily Practice ProblemsDocument2 pagesMathematics: Daily Practice Problemsmanoj sharmaNo ratings yet
- Aggregate Crushing Value: IS: 2386 (Part IV) - 1963)Document1 pageAggregate Crushing Value: IS: 2386 (Part IV) - 1963)SANJAY KUMAR SINGHNo ratings yet
- GENESTAR™ GP2300S - KurarayDocument4 pagesGENESTAR™ GP2300S - KurarayRafael CastroNo ratings yet
- Earth Pressure Calculations 2Document7 pagesEarth Pressure Calculations 2RAJAT SHARMANo ratings yet
- Lab 2Document16 pagesLab 2KINGS entertainment KHANNo ratings yet