Download as pdf or txt
You might also like
- Module 1 (Database Management in Construction)Document42 pagesModule 1 (Database Management in Construction)MARTHIE JASELLYN LOPENANo ratings yet
- 05 LagrangianDynamics 3Document36 pages05 LagrangianDynamics 3Music NonstopNo ratings yet
- Dynamic Model of Robots:: Robotics 2Document30 pagesDynamic Model of Robots:: Robotics 2kevinNo ratings yet
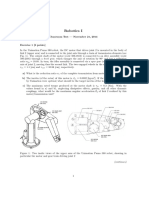
- Robotics I: Jt2 Motor 506-1612Document8 pagesRobotics I: Jt2 Motor 506-1612asalifew belachewNo ratings yet
- Optimumengineeringdesign Day3aDocument34 pagesOptimumengineeringdesign Day3aSantiago Garrido BullónNo ratings yet
- Data AnalysisDocument8 pagesData AnalysisGunnar CalvertNo ratings yet
- Linear Algebra ExamDocument2 pagesLinear Algebra Exammaes.daan1No ratings yet
- 02Document7 pages02Arm FullNo ratings yet
- Exercises: Converting To Polar Form Multiplying and Dividing in Polar FormDocument1 pageExercises: Converting To Polar Form Multiplying and Dividing in Polar FormDavidSeguraNo ratings yet
- Chapter 2 - SolutionDocument27 pagesChapter 2 - SolutionJohnNo ratings yet
- DobutamineDocument2 pagesDobutaminerohamonanganNo ratings yet
- 2931 - Acetatos - Mecanica Aplicada - Parte1Document18 pages2931 - Acetatos - Mecanica Aplicada - Parte1ruipescamouraNo ratings yet
- CaratulaDocument2 pagesCaratulaKevin SanabriaNo ratings yet
- Dot Products and Angles Via MathematicaDocument12 pagesDot Products and Angles Via Mathematicaandrewzay_670173166No ratings yet
- NIMCET Actual 2021Document7 pagesNIMCET Actual 2021Sweety MukatiNo ratings yet
- Bab 2 Dasar KriptografiDocument14 pagesBab 2 Dasar Kriptografidinda ayusmaNo ratings yet
- Paper 1 On Ansys - StaticDocument5 pagesPaper 1 On Ansys - StaticHarshit SNo ratings yet
- Sum and Difference Identities Practie 7.3 PDFDocument1 pageSum and Difference Identities Practie 7.3 PDFAriesNo ratings yet
- BRZ Electrical Wiring DiagramDocument404 pagesBRZ Electrical Wiring DiagramBagas Hanadi YudoNo ratings yet
- Liberi Liberi: Vasco Rossi ! 64Document2 pagesLiberi Liberi: Vasco Rossi ! 64Francesco MazzeraNo ratings yet
- Curvefitting PDFDocument6 pagesCurvefitting PDFRanju Marma RmsNo ratings yet
- Capital Marque ConsommateurDocument34 pagesCapital Marque Consommateurdaliaotmani5No ratings yet
- Delsph PDFDocument5 pagesDelsph PDFLuigiBanaNo ratings yet
- CH 10 - Photosynthesis Practice QuizDocument3 pagesCH 10 - Photosynthesis Practice QuizLoiz Gebrielle OlorNo ratings yet
- Half Range Fourier SeriesDocument18 pagesHalf Range Fourier SeriesVictor DoyoganNo ratings yet
- ARCA 2 Instruction REV 7Document159 pagesARCA 2 Instruction REV 7bosborn76No ratings yet
- Stata m9Document60 pagesStata m9ajayikayodeNo ratings yet
- ASCE795 SampleDocument30 pagesASCE795 Sampleghalib2014No ratings yet
- SOLUTIONS of Ytha Yu Charles Marut AssemDocument129 pagesSOLUTIONS of Ytha Yu Charles Marut AssemMohammad Anas BalochNo ratings yet
- E Cuac I Ones Funcional Es 1Document21 pagesE Cuac I Ones Funcional Es 1Chenfeng ChenNo ratings yet
- Ee 51 09 PDFDocument122 pagesEe 51 09 PDFXaiyalathpakse1 KeomanyxaiNo ratings yet
- IBC2000 SampleDocument31 pagesIBC2000 Sampleghalib2014No ratings yet
- CHAP 2 Sol-ManDocument27 pagesCHAP 2 Sol-ManAdriel BayNo ratings yet
- Corr PlotDocument2 pagesCorr PlotlavhackNo ratings yet
- Geometric Transformations in OpenGLDocument44 pagesGeometric Transformations in OpenGLWinnie TandaNo ratings yet
- Tiruppaavai New VersionDocument11 pagesTiruppaavai New Versionmarsulex2010No ratings yet
- Anchor Bolt & Base Plate DesignDocument2 pagesAnchor Bolt & Base Plate DesignPAWANNo ratings yet
- Jan. 25, 2010 Homework 1 Solutions 6.094: Introduction To MatlabDocument10 pagesJan. 25, 2010 Homework 1 Solutions 6.094: Introduction To MatlabAbelo AgarNo ratings yet
- 2.1 Distance Protection Testing - WYUDocument25 pages2.1 Distance Protection Testing - WYU劉簡No ratings yet
- Basics of CMOS Cell DesignDocument12 pagesBasics of CMOS Cell DesignDavid Villamarin RiveraNo ratings yet
- Relief Valves: SRVL SeriesDocument3 pagesRelief Valves: SRVL SeriesTuan TranNo ratings yet
- Semikron Datasheet Skhi 22 A B R l5012521Document12 pagesSemikron Datasheet Skhi 22 A B R l5012521Max DannyellNo ratings yet
- Impact of Artillery Fire On Tanks and Kazim Hussain Shahs Brave Stand As His Whole Squadron Fled The BattlefieldDocument25 pagesImpact of Artillery Fire On Tanks and Kazim Hussain Shahs Brave Stand As His Whole Squadron Fled The BattlefieldStrategicus Publications100% (1)
- 2010-SPE-139321-Multilateral Well Drilling Using Imaging Logs in Mature Field Near Tampico MexicoDocument6 pages2010-SPE-139321-Multilateral Well Drilling Using Imaging Logs in Mature Field Near Tampico MexicoGustavo EspinosaNo ratings yet
- Configuring and Deploying The ODI ConsoleDocument16 pagesConfiguring and Deploying The ODI ConsoleAmit Sharma100% (1)
- 10CalcSQLI 6upDocument9 pages10CalcSQLI 6upM UllerNo ratings yet
- Casco V-Gard MsaDocument2 pagesCasco V-Gard MsaLiz EncisoNo ratings yet
- PRV Audio D3240Ti DatasheetDocument1 pagePRV Audio D3240Ti DatasheetMary Trini VerasNo ratings yet
- PART 3: How To Create A Compelling Future Using The Awesome Power of Timelines..Document5 pagesPART 3: How To Create A Compelling Future Using The Awesome Power of Timelines..TygasNo ratings yet
- Historia Alta Edad Moderna Universal Parte IDocument52 pagesHistoria Alta Edad Moderna Universal Parte IJose BermudezNo ratings yet
- Informatica Creating Type 2Document7 pagesInformatica Creating Type 2Bala MuruganNo ratings yet
- BB 7750hd PartsDocument56 pagesBB 7750hd PartsDenis VieiraNo ratings yet
- Habilitation ElectriqueDocument6 pagesHabilitation ElectriqueMed GraineNo ratings yet
- 10 Rules of Engineered QualityDocument22 pages10 Rules of Engineered Qualitykrpradeep2007No ratings yet
- Linear Processing: Spring 2023 16-725 (Cmu Ri) : Bioe 2630 (Pitt) Dr. John GaleottiDocument20 pagesLinear Processing: Spring 2023 16-725 (Cmu Ri) : Bioe 2630 (Pitt) Dr. John GaleottiJavaid AakhoonNo ratings yet
- Curves RUDocument24 pagesCurves RUemilio antonio arteta romanNo ratings yet
- Theoretical and Empirical Researches inDocument9 pagesTheoretical and Empirical Researches incristiana florentina neagoieNo ratings yet
- Overhidrasi Dan DehidrasiDocument14 pagesOverhidrasi Dan DehidrasiMaftuhatulln 12No ratings yet
- Practica de Laboratorio N 1Document11 pagesPractica de Laboratorio N 1JOSENo ratings yet
- Bembli 2019Document8 pagesBembli 2019kevinNo ratings yet
- Robust Time Delay Estimation Based Intelligent PID Control of A 6DOF Exoskeleton RobotDocument4 pagesRobust Time Delay Estimation Based Intelligent PID Control of A 6DOF Exoskeleton RobotkevinNo ratings yet
- 2019 DilucaDocument10 pages2019 DilucakevinNo ratings yet
- Control Design of A De-Weighting Upper Limb Exoskeleton: 1 Siti Khadijah Ali 2 M. Osman TokhiDocument6 pagesControl Design of A De-Weighting Upper Limb Exoskeleton: 1 Siti Khadijah Ali 2 M. Osman TokhikevinNo ratings yet
- Integrated Task Sequencing and Path Planning For Robotic Remote Laser WeldingDocument16 pagesIntegrated Task Sequencing and Path Planning For Robotic Remote Laser WeldingkevinNo ratings yet
- Dynamic Model of Robots:: Robotics 2Document30 pagesDynamic Model of Robots:: Robotics 2kevinNo ratings yet
- Dynamic Model of Robots: Lagrangian Approach: Robotics 2Document28 pagesDynamic Model of Robots: Lagrangian Approach: Robotics 2kevinNo ratings yet
- Ejemplo 2 de Otro Quemador Diferente ModeloDocument36 pagesEjemplo 2 de Otro Quemador Diferente ModelokevinNo ratings yet
- Path Planning Oriented ObjectsDocument254 pagesPath Planning Oriented ObjectskevinNo ratings yet
- Study Plan M.Sc. Mechatronics Specialization: Photonic EngineeringDocument2 pagesStudy Plan M.Sc. Mechatronics Specialization: Photonic EngineeringkevinNo ratings yet
- Siemens Building Technologies: HVAC ProductsDocument10 pagesSiemens Building Technologies: HVAC ProductskevinNo ratings yet
- Study Plan M.Sc. Robotics: Faculty of Power and Aeronautical EngineeringDocument4 pagesStudy Plan M.Sc. Robotics: Faculty of Power and Aeronautical EngineeringkevinNo ratings yet
- Gopura2016 PDFDocument23 pagesGopura2016 PDFkevinNo ratings yet
- FULL TEXT - President Duterte's 2018 State of The Nation Address PDFDocument37 pagesFULL TEXT - President Duterte's 2018 State of The Nation Address PDFDarlene VenturaNo ratings yet
- Nature and Scope of Section 8 of Arbitration and Conciliation, Act, 1996Document15 pagesNature and Scope of Section 8 of Arbitration and Conciliation, Act, 1996sushmitaNo ratings yet
- CreditSuisse EuropeanSoftLuxuryGoodsStandingontheshouldersof (Soft) GiantsLVMH Kering Hermes Nov 07 2022Document151 pagesCreditSuisse EuropeanSoftLuxuryGoodsStandingontheshouldersof (Soft) GiantsLVMH Kering Hermes Nov 07 2022elvis laiNo ratings yet
- 2021 10 YR SWM PLAN With Guideliness Drop OffDocument160 pages2021 10 YR SWM PLAN With Guideliness Drop OffALMA BELLA M. PRADONo ratings yet
- OCPDDocument61 pagesOCPDyankurokuNo ratings yet
- BAC Resolution NoDocument3 pagesBAC Resolution NoAnnie Gracia G Estrella100% (1)
- Alyssa Locken Resume Jan 2021Document3 pagesAlyssa Locken Resume Jan 2021api-544203584No ratings yet
- Operation Manual: User's GuideDocument173 pagesOperation Manual: User's GuideBobby AldNo ratings yet
- University of Cagayan Valley: College Freshmen Program (CFP)Document13 pagesUniversity of Cagayan Valley: College Freshmen Program (CFP)Turingan, Ranz Gabriel, D.No ratings yet
- Sample Balance ScorecardDocument1 pageSample Balance ScorecardRex Jamen100% (1)
- Nyepi Packages I RevisedDocument10 pagesNyepi Packages I Revisedreservation.rumahkitatravelNo ratings yet
- Practice Development Guide and Evaluation Rubric - Unit 3 - Phase 4 - Practical Component - Simulated PracticesDocument7 pagesPractice Development Guide and Evaluation Rubric - Unit 3 - Phase 4 - Practical Component - Simulated PracticesMaria Jose Ramos BarcoNo ratings yet
- Assessment ProcedureDocument8 pagesAssessment ProcedureAbhishek SharmaNo ratings yet
- Chapter 5 Health Information SystemDocument36 pagesChapter 5 Health Information SystemAirishNo ratings yet
- Akbayan Vs Thomas G. AquinoDocument14 pagesAkbayan Vs Thomas G. AquinoNicole IbayNo ratings yet
- B-RAM5 New FeaturesDocument13 pagesB-RAM5 New FeaturesGru SmithNo ratings yet
- Derivative SecuritiesDocument3 pagesDerivative SecuritiesWataru TeradaNo ratings yet
- Manual SunStarMPPTDocument53 pagesManual SunStarMPPTmikenrNo ratings yet
- DELA PENA V CaDocument1 pageDELA PENA V Caabakada_kayeNo ratings yet
- Weekly Journal 1 - MahbubaDocument3 pagesWeekly Journal 1 - MahbubaasfaqoveeNo ratings yet
- Ome44850k VR7000 7000SDocument60 pagesOme44850k VR7000 7000SJorge OrsNo ratings yet
- Variflex RVCF PodrobnyDocument132 pagesVariflex RVCF PodrobnyAntonio B GuzamanNo ratings yet
- Iwc DumpDocument28 pagesIwc DumpSendy Rubio bonilla96No ratings yet
- Technical Datasheet: Engineering SteelDocument1 pageTechnical Datasheet: Engineering SteelSunil Kumar GoudaNo ratings yet
- Digital Media Project Proposal: Submitted To: DR Sawera ShamiDocument3 pagesDigital Media Project Proposal: Submitted To: DR Sawera ShamiJaveria JanNo ratings yet
- Agco Sisu Power enDocument12 pagesAgco Sisu Power enMihajlo Valka100% (1)
- Literature Review On Motivation TheoriesDocument9 pagesLiterature Review On Motivation Theoriesafdtslawm100% (1)
- Clean Public Areas 1Document10 pagesClean Public Areas 1Lara Melissa TabamoNo ratings yet
- WDG4 El PS 11 R3Document6 pagesWDG4 El PS 11 R3Rahul MauryaNo ratings yet