Download as pdf or txt
You might also like
- Lab Sheet: Faculty of Engineering & TechnologyDocument12 pagesLab Sheet: Faculty of Engineering & TechnologyMun Kit ChokNo ratings yet
- Design and Development of Single Axis Solar Tracking System Using C8051F120 (CYGNAL) MicrocontrollerDocument8 pagesDesign and Development of Single Axis Solar Tracking System Using C8051F120 (CYGNAL) MicrocontrollerarcherselevatorsNo ratings yet
- PLC Lab TasksDocument10 pagesPLC Lab TasksMahesh ArjunNo ratings yet
- C++ Revision Tour Long QuestionsDocument17 pagesC++ Revision Tour Long Questionsmehak2106No ratings yet
- Chapter 4Document46 pagesChapter 4CerealkillerNo ratings yet
- Chapter 3 - Choppers - PDFDocument75 pagesChapter 3 - Choppers - PDFZahidullah100% (1)
- Techno-Environmental Feature-Based Sun Tracking Model Fabrication & Optimal Analyses by Precise Position AlgorithmDocument9 pagesTechno-Environmental Feature-Based Sun Tracking Model Fabrication & Optimal Analyses by Precise Position AlgorithmInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- How Does A PID Controller Work - Structure & Tuning MethodsDocument12 pagesHow Does A PID Controller Work - Structure & Tuning Methodsmurugan1984No ratings yet
- Chapter 2 - FIR Filters - Digital Filter DesignDocument100 pagesChapter 2 - FIR Filters - Digital Filter DesignSanjay BalwaniNo ratings yet
- Chapter 6Document38 pagesChapter 6Deivasigamani SubramaniyanNo ratings yet
- Lab 9 TransistorDocument8 pagesLab 9 TransistorChing Wai YongNo ratings yet
- LED Flasher Circuit ExplanationDocument5 pagesLED Flasher Circuit ExplanationBharathNo ratings yet
- FIR Using Window MethodDocument24 pagesFIR Using Window MethodModyKing99No ratings yet
- Monitoring and Control of Solar Power System Using Reliance SCADADocument4 pagesMonitoring and Control of Solar Power System Using Reliance SCADAEditor IJTSRDNo ratings yet
- Chapter No. Description Page No.: 1.1 Block Diagram 3Document69 pagesChapter No. Description Page No.: 1.1 Block Diagram 3Deekshith Ram50% (2)
- Electric Vehicle V.S Combustion VehicleDocument13 pagesElectric Vehicle V.S Combustion VehicleManas AmbekarNo ratings yet
- Window Function ComparisonsDocument7 pagesWindow Function ComparisonsHaripriya RadhakrishnanNo ratings yet
- Digital Signal Processing Lab - DR - R KumaraswamyDocument56 pagesDigital Signal Processing Lab - DR - R Kumaraswamysiap scribdNo ratings yet
- Universiti Teknologi Mara Final Examination: Confidential EM/JAN 2012/MEM561/KJP516/470Document4 pagesUniversiti Teknologi Mara Final Examination: Confidential EM/JAN 2012/MEM561/KJP516/470Nasri JamaludinNo ratings yet
- 16 Unit15Document45 pages16 Unit15ZULUNo ratings yet
- Solar Powered Mobile Operated Smart Multifunction Agriculture RobotDocument4 pagesSolar Powered Mobile Operated Smart Multifunction Agriculture RobotVIVA-TECH IJRINo ratings yet
- EE658A Assignment 6Document14 pagesEE658A Assignment 6sai kNo ratings yet
- Dee3071 Electronic Computer Aided Design (Ecad) - SDocument6 pagesDee3071 Electronic Computer Aided Design (Ecad) - Skshika meganathanNo ratings yet
- Arduino Solar Tracker Using LDR and Servo MotorDocument9 pagesArduino Solar Tracker Using LDR and Servo MotorAvnish SharmaNo ratings yet
- Bank Token Display SystemDocument22 pagesBank Token Display Systemsandy_18_sn5879No ratings yet
- Industrial Electronics 1st ExamDocument34 pagesIndustrial Electronics 1st ExamJomar Bonje100% (1)
- Real-Time Monitoring Security System Integrated With Raspberry Pi and E-Mail Communication LinkDocument12 pagesReal-Time Monitoring Security System Integrated With Raspberry Pi and E-Mail Communication LinkIJRASETPublicationsNo ratings yet
- Assignment 2Document5 pagesAssignment 2aiao90No ratings yet
- Adaptive Lighting For AutomobileDocument18 pagesAdaptive Lighting For Automobilekavitha mNo ratings yet
- Addressing The Causes That Hinder Effective English Language Teaching in Saudi Universities: A Case StudyDocument36 pagesAddressing The Causes That Hinder Effective English Language Teaching in Saudi Universities: A Case StudyChoudhary Zahid JavidNo ratings yet
- C Programming Lab ManualDocument45 pagesC Programming Lab ManualSiva Kiran100% (3)
- Practical FIR Filter Design - Part 1 - Design With Octave or MatlabDocument9 pagesPractical FIR Filter Design - Part 1 - Design With Octave or MatlabNorozKhanNo ratings yet
- Design & Implementation of Mamdani Fuzzy Inference System On An Automatic Train Braking SystemDocument5 pagesDesign & Implementation of Mamdani Fuzzy Inference System On An Automatic Train Braking SystemijsretNo ratings yet
- 4b Digital System - Logic Gates & Boolean ExpressionDocument52 pages4b Digital System - Logic Gates & Boolean ExpressionAhmad IzzuddinNo ratings yet
- (Experiment 3) BJT - Common Emiter Amplifier PDFDocument9 pages(Experiment 3) BJT - Common Emiter Amplifier PDFArik JuniarNo ratings yet
- Applications of 8051 MicrocontrollersDocument23 pagesApplications of 8051 MicrocontrollersUsama Spiffy100% (1)
- Mamdani Sugeno Fuzzy MethodDocument53 pagesMamdani Sugeno Fuzzy MethodRahayu WindasariNo ratings yet
- Design FIR FilterDocument22 pagesDesign FIR Filtersaran52_eceNo ratings yet
- Malvino 6,7,8,9Document3 pagesMalvino 6,7,8,9Dante CruzNo ratings yet
- 15 Electronics in Renewable Energy SystemsDocument25 pages15 Electronics in Renewable Energy SystemsHmaedNo ratings yet
- Mathematical Modelling of Linear Induction MotorDocument4 pagesMathematical Modelling of Linear Induction MotorNasser100% (1)
- Scilab ProgramsDocument47 pagesScilab ProgramsNatraj Anita Prabhurao Hulsure100% (1)
- Design of Fully Differential Operational Amplifier With High Gain, Large Bandwidth and Large Dynamic RangeDocument93 pagesDesign of Fully Differential Operational Amplifier With High Gain, Large Bandwidth and Large Dynamic RangeAhmed EdrisNo ratings yet
- EMG 2505 - Measurement and Instrumentation PDFDocument159 pagesEMG 2505 - Measurement and Instrumentation PDFVasda VinciNo ratings yet
- ENME503 Assignments Solutions 02Document10 pagesENME503 Assignments Solutions 02Seifeldin T. AbdelghanyNo ratings yet
- Power Electronics 05 60XXDocument58 pagesPower Electronics 05 60XXwhiteelephant93No ratings yet
- EE6504 Electrical Machines-II PDFDocument233 pagesEE6504 Electrical Machines-II PDFkumar m100% (1)
- Varistor IntroductionDocument7 pagesVaristor IntroductionRadhakrishnan100% (1)
- Mid Term Question Paper AI Soln v2Document6 pagesMid Term Question Paper AI Soln v2haris razaNo ratings yet
- Microcontroller Based Automatic Solar Power Tracking SystemDocument6 pagesMicrocontroller Based Automatic Solar Power Tracking SystemIAEME Publication50% (2)
- Time Response AnalysisDocument43 pagesTime Response AnalysisAkmal IsnaeniNo ratings yet
- Lab Report: Experiment-3Document6 pagesLab Report: Experiment-3ayash mohantyNo ratings yet
- Integrated Mobile Surveillance and Wireless Sensor SystemDocument10 pagesIntegrated Mobile Surveillance and Wireless Sensor SystemARVIND100% (1)
- MECH-151 TEXT BOOK TEVTA - 3 DesktopDocument244 pagesMECH-151 TEXT BOOK TEVTA - 3 DesktopWasif Ali Sindhu100% (1)
- Intelligent Solar Tracker System Implemented On 8051 MicrocontrollerDocument5 pagesIntelligent Solar Tracker System Implemented On 8051 MicrocontrollerseventhsensegroupNo ratings yet
- Dual Axis Solar Tracking SystemDocument22 pagesDual Axis Solar Tracking SystemReshma DurgasriNo ratings yet
- Design and Fabrication of Stair Climbing Hand Cart: Government Engineering CollegeDocument28 pagesDesign and Fabrication of Stair Climbing Hand Cart: Government Engineering CollegeFayyaz NadeemNo ratings yet
- Lab 5 Transistor Characteristic 1Document14 pagesLab 5 Transistor Characteristic 1Ratnadewi SerbiniNo ratings yet
- Automatic Control - Lecture 4Document15 pagesAutomatic Control - Lecture 4MO 2004No ratings yet
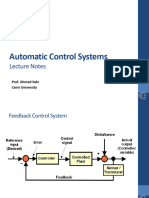
- Lecture No. 4 - Dr. SakrDocument12 pagesLecture No. 4 - Dr. SakrMohamed Essam HusseinNo ratings yet
- Load Sharing Regulation of A Grid-Connected Solar Photovoltaic PV System in Karbala CityDocument15 pagesLoad Sharing Regulation of A Grid-Connected Solar Photovoltaic PV System in Karbala CityChetan KotwalNo ratings yet
- Energies 10 00523 PDFDocument22 pagesEnergies 10 00523 PDFChetan KotwalNo ratings yet
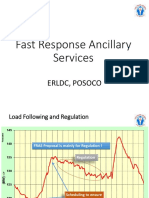
- Fast Response Ancillary Services: Erldc, PosocoDocument18 pagesFast Response Ancillary Services: Erldc, PosocoChetan KotwalNo ratings yet
- Research On Steady State Voltage Stability of Power System With Distributed Static Series CompensatorDocument5 pagesResearch On Steady State Voltage Stability of Power System With Distributed Static Series CompensatorChetan KotwalNo ratings yet
- Yadav 2019Document27 pagesYadav 2019Chetan KotwalNo ratings yet
- nfs13 PDFDocument21 pagesnfs13 PDFChetan KotwalNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument21 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsChetan KotwalNo ratings yet
- Classifiers PDFDocument18 pagesClassifiers PDFChetan KotwalNo ratings yet
- AC Power Quality and StandardsDocument13 pagesAC Power Quality and StandardsChetan KotwalNo ratings yet
- Transmission Network Reduction Method Using Nonlinear OptimizationDocument7 pagesTransmission Network Reduction Method Using Nonlinear OptimizationChetan KotwalNo ratings yet
- Power Market Power Trading Power Exchange PDFDocument65 pagesPower Market Power Trading Power Exchange PDFChetan KotwalNo ratings yet
- ObjectivesDocument15 pagesObjectivesChetan KotwalNo ratings yet
- Design of The Pv-Upqc System For Long Voltage Interruption CompensationDocument17 pagesDesign of The Pv-Upqc System For Long Voltage Interruption CompensationChetan KotwalNo ratings yet
- Ashraf 2014Document6 pagesAshraf 2014Chetan KotwalNo ratings yet
- Application of REI Equivalent in Reactive Power Optimization Control in Regional Power GridDocument4 pagesApplication of REI Equivalent in Reactive Power Optimization Control in Regional Power GridChetan KotwalNo ratings yet
- Flow: A For Stabilify: Continuation Power Tool Parametric Voltage Security AnalysisDocument6 pagesFlow: A For Stabilify: Continuation Power Tool Parametric Voltage Security AnalysisChetan KotwalNo ratings yet
- Sub Synchronous Resonance: Facts ControllersDocument17 pagesSub Synchronous Resonance: Facts ControllersChetan KotwalNo ratings yet
- SVC Applications: Increase in Steady-State Power-Transfer CapacityDocument21 pagesSVC Applications: Increase in Steady-State Power-Transfer CapacityChetan KotwalNo ratings yet
- 11 Major Power Grid BlackoutsDocument32 pages11 Major Power Grid BlackoutsChetan KotwalNo ratings yet
- 1.1 Proposal of Smart GridDocument6 pages1.1 Proposal of Smart GridChetan KotwalNo ratings yet
- Intelligent Power Distribution Network Feeder Realization Using Simulation & PLC Based Hardware ModelDocument6 pagesIntelligent Power Distribution Network Feeder Realization Using Simulation & PLC Based Hardware ModelChetan KotwalNo ratings yet
- Etap 18 New Features BrochureDocument12 pagesEtap 18 New Features BrochureChetan KotwalNo ratings yet
- Distribution Automation Summary Report - 09!29!16Document115 pagesDistribution Automation Summary Report - 09!29!16Chetan KotwalNo ratings yet
- Energies: A Novel Ground Fault Non-Directional Selective Protection Method For Ungrounded Distribution NetworksDocument26 pagesEnergies: A Novel Ground Fault Non-Directional Selective Protection Method For Ungrounded Distribution NetworksChetan KotwalNo ratings yet
- Brochure GIAN FebDocument2 pagesBrochure GIAN FebChetan KotwalNo ratings yet
- WalveDocument34 pagesWalveChetan KotwalNo ratings yet
- Information Systems Analysis and Design: Lesson PlanDocument10 pagesInformation Systems Analysis and Design: Lesson PlanEduardo AlapiscoNo ratings yet
- Next Generation Prognostics and Health Management For Unmanned AircraftDocument14 pagesNext Generation Prognostics and Health Management For Unmanned AircraftjusufjNo ratings yet
- Automation of Software Application Engineering Using Machine Learning and ReasoningDocument32 pagesAutomation of Software Application Engineering Using Machine Learning and Reasoningrock starNo ratings yet
- Unit 2 Tester AssignmentsDocument3 pagesUnit 2 Tester Assignmentsroyhamlinjr7No ratings yet
- Seminar ReportDocument43 pagesSeminar ReportMohammed YaseenNo ratings yet
- Natural Language Processing (NLP) - Module 4 Part 2Document50 pagesNatural Language Processing (NLP) - Module 4 Part 2ENG19CS0357 Vedha Murthy N LNo ratings yet
- Manual Testing - Common Interview QuestionsDocument31 pagesManual Testing - Common Interview QuestionsSravanthi AylaNo ratings yet
- Ix - Ai - Pre Midterm (2021-22) - MSDocument4 pagesIx - Ai - Pre Midterm (2021-22) - MSnaveenbabu19No ratings yet
- IE405 System DynamicsDocument2 pagesIE405 System DynamicsloshidhNo ratings yet
- Instant Download Control Systems Engineering 7th Edition Ebook PDF PDF ScribdDocument41 pagesInstant Download Control Systems Engineering 7th Edition Ebook PDF PDF Scribdlydia.hawkins29398% (53)
- 2.ObjectDetection Two StageDocument66 pages2.ObjectDetection Two StageUyên VươngNo ratings yet
- FAA System Safety Handbook, Chapter 8 - Safety Analysis - Hazard Analysis TasksDocument36 pagesFAA System Safety Handbook, Chapter 8 - Safety Analysis - Hazard Analysis TasksPina Korbacs100% (1)
- CRP1 Will IncludeDocument2 pagesCRP1 Will IncludeMuhammad ImtiazNo ratings yet
- Ipc PPT 7thDocument25 pagesIpc PPT 7thChemical engrNo ratings yet
- Lesson: CC13 - Systems Analysis and Design Introduction To Systems Analysis and DesignDocument9 pagesLesson: CC13 - Systems Analysis and Design Introduction To Systems Analysis and DesignRuss MayosNo ratings yet
- QN: What Is Difference Between Symbolic AI and ML? AnsDocument2 pagesQN: What Is Difference Between Symbolic AI and ML? AnsRajesh RanjanNo ratings yet
- The Basics of Machine Learning - Element14Document16 pagesThe Basics of Machine Learning - Element14Technical NoviceNo ratings yet
- Production Operations Management Iba Mba Program 59cc45231723dd7d77a51157Document8 pagesProduction Operations Management Iba Mba Program 59cc45231723dd7d77a51157Ahsan IqbalNo ratings yet
- Aircraft Pitch - G1 ReportDocument79 pagesAircraft Pitch - G1 ReportTrabajo AviaciónNo ratings yet
- Software Testing Is An Investigation Conducted To ProvideDocument17 pagesSoftware Testing Is An Investigation Conducted To ProvideSathiya ShanmugamNo ratings yet
- Historyof Artificial IntelligenceDocument7 pagesHistoryof Artificial IntelligenceFarah Issa00No ratings yet
- Introduction To Artificial Intelligence: Dr. Humera FarooqDocument38 pagesIntroduction To Artificial Intelligence: Dr. Humera FarooqMaleeha MasoodNo ratings yet
- Agile - TOFDocument3 pagesAgile - TOFwanmrafiqNo ratings yet
- 058 - GE8077 Total Quality Management - Anna University 2017 Regulation SylDocument2 pages058 - GE8077 Total Quality Management - Anna University 2017 Regulation Sylvijay cvijayNo ratings yet
- Sargent, R. W. H. Bibcode Doi Bryson, A. E. DoiDocument8 pagesSargent, R. W. H. Bibcode Doi Bryson, A. E. DoiKaleem Ullah Research AssociateNo ratings yet
- Swt540 Software-metrics-And-reliability TH 1.10 Ac26Document2 pagesSwt540 Software-metrics-And-reliability TH 1.10 Ac26netgalaxy2010No ratings yet
- Ai, ML, DL PDFDocument2 pagesAi, ML, DL PDFsetiawan.hadiNo ratings yet
- Requirements Analysis TemplateDocument4 pagesRequirements Analysis TemplateHussain RahibNo ratings yet
- Systems Approach To Management: - Presenter: Rebat Kumar DhakalDocument51 pagesSystems Approach To Management: - Presenter: Rebat Kumar DhakalNirvana NircisNo ratings yet
- Project Scheduling by CPM & PertDocument51 pagesProject Scheduling by CPM & PertMd. Mizanur RahamanNo ratings yet