Download as pdf or txt
You might also like
- Young People Faces More Challenges TodayDocument2 pagesYoung People Faces More Challenges TodayThena78% (23)
- Annie Leibovitz Photography AnalysisDocument4 pagesAnnie Leibovitz Photography AnalysisSteffHolden100% (1)
- Eric Roman Coins PDFDocument2 pagesEric Roman Coins PDFBenNo ratings yet
- Fire Pump Idiot ProofingDocument52 pagesFire Pump Idiot ProofingKenneth100% (1)
- How To Use This Sheet:: Life Design List © Andrew Leedham 2019Document10 pagesHow To Use This Sheet:: Life Design List © Andrew Leedham 2019Dustin CampNo ratings yet
- Performance Analysis of The Periodogram-Based Energy Detector in Fading ChannelsDocument10 pagesPerformance Analysis of The Periodogram-Based Energy Detector in Fading ChannelsAbdul RahimNo ratings yet
- Adaptive Detection With Training Data in Partially HomogeneousDocument8 pagesAdaptive Detection With Training Data in Partially HomogeneousvasikasNo ratings yet
- Performance Amelioration of Adaptive Detection of Moderately-Fluctuating Radar Targets in Severe InterferenceDocument24 pagesPerformance Amelioration of Adaptive Detection of Moderately-Fluctuating Radar Targets in Severe Interferencealp_alpNo ratings yet
- Yan 2017Document6 pagesYan 2017Mohamed BaadecheNo ratings yet
- A Novel Method For Sea Clutter Suppression and Target Detection Via Deep Convolutional AutoencoderDocument6 pagesA Novel Method For Sea Clutter Suppression and Target Detection Via Deep Convolutional Autoencoderrendy anggaraNo ratings yet
- Power System Harmonics Estimation Using Linear Least Squares Method andDocument6 pagesPower System Harmonics Estimation Using Linear Least Squares Method andVladimir BecejacNo ratings yet
- Selection of Samples For Calibration in Near-Infrared Spectroscopy. Part Ih Selection Based On Spectral MeasurementsDocument7 pagesSelection of Samples For Calibration in Near-Infrared Spectroscopy. Part Ih Selection Based On Spectral MeasurementsAlejandro RomeroNo ratings yet
- Cramer Round RaoDocument8 pagesCramer Round RaoJj KumarNo ratings yet
- Performance Analysis of Cooperative Spectrum Sensing Using Double Dynamic ThresholdDocument10 pagesPerformance Analysis of Cooperative Spectrum Sensing Using Double Dynamic ThresholdIAES IJAINo ratings yet
- CFAR Detection guassian Background - Meng Xiangwei Qu - 省略 - ai 264001 ChinaDocument4 pagesCFAR Detection guassian Background - Meng Xiangwei Qu - 省略 - ai 264001 ChinaRolando BoltonNo ratings yet
- Electromagnetic Scattering Theory: Johns APL TechnicalDocument15 pagesElectromagnetic Scattering Theory: Johns APL TechnicalValerie LaneNo ratings yet
- 19 ParkDocument7 pages19 ParkhabbibrachmanNo ratings yet
- Iterative root-MUSIC Algorithm For DOA Estimation: (Invited Paper)Document4 pagesIterative root-MUSIC Algorithm For DOA Estimation: (Invited Paper)Lamiae SqualiNo ratings yet
- Constant False Alarm Rate Performance Prediction For Non-Independent and Non-Identically Distributed Gamma Fluctuating TargetsDocument9 pagesConstant False Alarm Rate Performance Prediction For Non-Independent and Non-Identically Distributed Gamma Fluctuating Targetshafid jouiniNo ratings yet
- Arctangent Demodulation With DC Offset Compensation in Quadrature Doppler Radar Receiver SystemsDocument7 pagesArctangent Demodulation With DC Offset Compensation in Quadrature Doppler Radar Receiver Systemssoham lakhoteNo ratings yet
- Energy Detection Using Estimated Noise Variance For Spectrum Sensing in Cognitive Radio NetworksDocument6 pagesEnergy Detection Using Estimated Noise Variance For Spectrum Sensing in Cognitive Radio Networkssuchi87No ratings yet
- Cross Freq Paper v6Document10 pagesCross Freq Paper v6Asinega AsinegadNo ratings yet
- Uncertainty Evaluation and Propagation For Spectral MeasurementsDocument11 pagesUncertainty Evaluation and Propagation For Spectral MeasurementsMiguelNo ratings yet
- QRS Detection in ECGDocument4 pagesQRS Detection in ECGIfrah AlamNo ratings yet
- Sparsity Estimation From Compressive Projections Via Sparse Random MatricesDocument18 pagesSparsity Estimation From Compressive Projections Via Sparse Random MatricesZorba ZorbaNo ratings yet
- Stellar Data Classification Using SVM With Wavelet TransformatioDocument6 pagesStellar Data Classification Using SVM With Wavelet TransformatioDRScienceNo ratings yet
- Particle FilterDocument6 pagesParticle FilterrainydaesNo ratings yet
- Tracking Separating Targets With A Monopulse Radar: Idealized ResolutionDocument7 pagesTracking Separating Targets With A Monopulse Radar: Idealized ResolutionthufulNo ratings yet
- Near Far Targets Using Antenna Arrays: Superresolution of or Field Coherent AperiodicDocument11 pagesNear Far Targets Using Antenna Arrays: Superresolution of or Field Coherent AperiodicBhargav BikkaniNo ratings yet
- Acoustic Source Localization and Beamforming: Theory and PracticeDocument13 pagesAcoustic Source Localization and Beamforming: Theory and PracticeKhalil HsaineNo ratings yet
- Sub Nyquist Radar Prototype Hardware andDocument14 pagesSub Nyquist Radar Prototype Hardware andVenkateswaran NNo ratings yet
- A Fast Strategy To Determine The Physical and Electrical Parameters of Photovoltaic Silicon CellDocument10 pagesA Fast Strategy To Determine The Physical and Electrical Parameters of Photovoltaic Silicon CellJohn DarrenNo ratings yet
- Radio Occultation Signal Analysis: ACE-Scientific Support StudyDocument38 pagesRadio Occultation Signal Analysis: ACE-Scientific Support StudySetyperNo ratings yet
- Performance of Space-Time Codes For A Large Number of AntennasDocument10 pagesPerformance of Space-Time Codes For A Large Number of Antennashendra lamNo ratings yet
- Crblin 20Document21 pagesCrblin 20khaledelwalid1645No ratings yet
- Improved Energy Detector Based Spectrum Sensing For Cognitive Radio: An Experimental StudyDocument5 pagesImproved Energy Detector Based Spectrum Sensing For Cognitive Radio: An Experimental Studysuchi87No ratings yet
- Topological Localization Via Signals of Opportunity: Michael Robinson, Member, IEEE, Robert GhristDocument12 pagesTopological Localization Via Signals of Opportunity: Michael Robinson, Member, IEEE, Robert GhristPihu JanNo ratings yet
- Estimating and Interpreting The Instantaneous Frequency of A Signal. II. Algorithms and ApplicationsDocument30 pagesEstimating and Interpreting The Instantaneous Frequency of A Signal. II. Algorithms and ApplicationsJYOTHISH KRISHNANo ratings yet
- Correlation Factor-BasedDocument5 pagesCorrelation Factor-BasedCesar Fernando Merlo AstudilloNo ratings yet
- Distributed Quantum Phase Estimation With Entangled PhotonsDocument8 pagesDistributed Quantum Phase Estimation With Entangled Photons박정우No ratings yet
- Analysis of CFAR Detection With Multiple Pulses Transmission Case in Pareto Distributed ClutterDocument6 pagesAnalysis of CFAR Detection With Multiple Pulses Transmission Case in Pareto Distributed ClutterZellagui EnergyNo ratings yet
- Quantum Monte CarloDocument6 pagesQuantum Monte Carlomar.sedanoortNo ratings yet
- An Efficient Estimator For TDOA-based Source Localization With Minimum Number of SensorsDocument4 pagesAn Efficient Estimator For TDOA-based Source Localization With Minimum Number of SensorswidyaNo ratings yet
- Paper 1Document29 pagesPaper 1khaledelwalid1645No ratings yet
- Muller 2020Document4 pagesMuller 2020AHMADNo ratings yet
- Research Article: On Calibration and Direction Finding With Uniform Circular ArraysDocument13 pagesResearch Article: On Calibration and Direction Finding With Uniform Circular Arraysfaruk tanNo ratings yet
- Squeezed Light and Entangled ImagesDocument11 pagesSqueezed Light and Entangled ImagesQiang WangNo ratings yet
- Sample Preparation For Evaluation of Detection Limits in X-Ray Fluorescence SpectrometryDocument5 pagesSample Preparation For Evaluation of Detection Limits in X-Ray Fluorescence SpectrometryEdson Batista De Oliveira JuniorNo ratings yet
- Stollenwerk JApplPhysB 105 163 2011Document17 pagesStollenwerk JApplPhysB 105 163 2011pedroNo ratings yet
- 11 - Influence Meth - ExperimDocument6 pages11 - Influence Meth - Experimbexy jassmyn martinez perezNo ratings yet
- Fast-Fourier-transform Based Numerical Integration Method For The RayleighSommerfeld Diffraction Formula, PDFDocument9 pagesFast-Fourier-transform Based Numerical Integration Method For The RayleighSommerfeld Diffraction Formula, PDFluo wangNo ratings yet
- Ekf-Jpda 2020 New Vs OthrDocument2 pagesEkf-Jpda 2020 New Vs OthrKhaireddine ZaraiNo ratings yet
- Wideband Array Processing Using A Two-Sided Correlation TransformationDocument13 pagesWideband Array Processing Using A Two-Sided Correlation TransformationSuyash SinghNo ratings yet
- Shannon-Theoretic Limits On Noisy Compressive SamplingDocument13 pagesShannon-Theoretic Limits On Noisy Compressive SamplingdefiNo ratings yet
- Ultra-Wideband Microwave Imaging Via Space-Time BeamformingDocument27 pagesUltra-Wideband Microwave Imaging Via Space-Time BeamformingRobin Nojibur RahmanNo ratings yet
- High Range Resolution Profile Automatic Target Recognition Using Sparse RepresentationDocument7 pagesHigh Range Resolution Profile Automatic Target Recognition Using Sparse RepresentationSunny GNo ratings yet
- The Step by Step Development of NRW MethodDocument5 pagesThe Step by Step Development of NRW MethodsouhailNo ratings yet
- 2152.pdf 45th Lunar and Planetary Science Conference (2014)Document2 pages2152.pdf 45th Lunar and Planetary Science Conference (2014)eurobeatpoi PoiNo ratings yet
- A Directionfinding Antenna System Using An Integrated Six-Port CircuitDocument5 pagesA Directionfinding Antenna System Using An Integrated Six-Port CircuitWalter Santiago Campos ArandaNo ratings yet
- Jae S SampleDocument24 pagesJae S Samplecarmen ruedaNo ratings yet
- A Comparative Study of Different Entropies For Spectrum Sensing TechniquesDocument15 pagesA Comparative Study of Different Entropies For Spectrum Sensing Techniquessuchi87No ratings yet
- Array Processing For Target DOA, Localization, and Classification Based On AML and SVM Algorithms in Sensor NetworksDocument17 pagesArray Processing For Target DOA, Localization, and Classification Based On AML and SVM Algorithms in Sensor NetworksTrilochan PanigrahiNo ratings yet
- Joint 2D-DOA and Carrier Frequency Estimation Technique Using Nonlinear Kalman Filters For Cognitive RadioDocument13 pagesJoint 2D-DOA and Carrier Frequency Estimation Technique Using Nonlinear Kalman Filters For Cognitive RadioAnghye PlataNo ratings yet
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsFrom EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsNo ratings yet
- Department of Electronic Engineering Ele2Emi Electronic Measurements & InstrumentationDocument7 pagesDepartment of Electronic Engineering Ele2Emi Electronic Measurements & InstrumentationMnshNo ratings yet
- A Discussion On Pellistor Gas Sensor Responses: CompensatorDocument5 pagesA Discussion On Pellistor Gas Sensor Responses: CompensatorMnshNo ratings yet
- FrostDocument8 pagesFrostMnshNo ratings yet
- ECE 308 Discrete-Time Signals and Systems: 1. Graphical RepresentationDocument8 pagesECE 308 Discrete-Time Signals and Systems: 1. Graphical RepresentationMnshNo ratings yet
- Chapter 3: Linear Difference EquationsDocument7 pagesChapter 3: Linear Difference EquationsMnshNo ratings yet
- Ece 457 Homework #1 Due January 24, 2003: KHZ WDocument2 pagesEce 457 Homework #1 Due January 24, 2003: KHZ WMnshNo ratings yet
- Lecture 3 - Time-Domain Analysis (Zero-Input Response)Document5 pagesLecture 3 - Time-Domain Analysis (Zero-Input Response)MnshNo ratings yet
- Unit 6 - Week 4: Assignment 4Document5 pagesUnit 6 - Week 4: Assignment 4MnshNo ratings yet
- Assessment of The Quality of Bottled Water Marketed in Addis Ababa, EthiopiaDocument21 pagesAssessment of The Quality of Bottled Water Marketed in Addis Ababa, EthiopiaMnshNo ratings yet
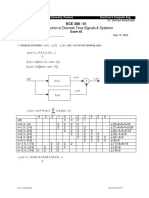
- Introduction To Discrete Time Signals & Systems: Exam #2 NameDocument4 pagesIntroduction To Discrete Time Signals & Systems: Exam #2 NameMnshNo ratings yet
- Controls Problems For Qualifying Exam - Spring 2014: Problem 1Document11 pagesControls Problems For Qualifying Exam - Spring 2014: Problem 1MnshNo ratings yet
- Von-Neumann Architecture Vs Harvard Architecture: February 2019Document6 pagesVon-Neumann Architecture Vs Harvard Architecture: February 2019MnshNo ratings yet
- Uploads 1Document29 pagesUploads 1MnshNo ratings yet
- Solution of Linear Constant-Coefficient Difference EquationsDocument4 pagesSolution of Linear Constant-Coefficient Difference EquationsMnshNo ratings yet
- 2cos 3sin (3), : EE 442 Homework #4Document6 pages2cos 3sin (3), : EE 442 Homework #4MnshNo ratings yet
- LTI Described by Difference Equations: Yn XK NDocument4 pagesLTI Described by Difference Equations: Yn XK NMnshNo ratings yet
- DSBSC Generation DSBSC Generation DSBSC Generation DSBSC GenerationDocument14 pagesDSBSC Generation DSBSC Generation DSBSC Generation DSBSC GenerationMnshNo ratings yet
- EC403 Analog CommunicationDocument53 pagesEC403 Analog CommunicationMnshNo ratings yet
- University of The Witwatersrand, Johannesburg: Hrs / /20 Exams Office Use OnlyDocument6 pagesUniversity of The Witwatersrand, Johannesburg: Hrs / /20 Exams Office Use OnlyMnshNo ratings yet
- Continuous Wave Modulation: Baseband Signal Message Modulated WaveformDocument18 pagesContinuous Wave Modulation: Baseband Signal Message Modulated WaveformMnshNo ratings yet
- Chapter 1 Accounting Information Systems: An OverviewDocument28 pagesChapter 1 Accounting Information Systems: An OverviewPeishi OngNo ratings yet
- W1A1Document2 pagesW1A1Arul PrasaadNo ratings yet
- Simplified Basic and Applied ResearchDocument2 pagesSimplified Basic and Applied ResearchMarwan ezz el dinNo ratings yet
- Textbook Probability On Graphs Random Processes On Graphs and Lattices Geoffrey Grimmett Ebook All Chapter PDFDocument45 pagesTextbook Probability On Graphs Random Processes On Graphs and Lattices Geoffrey Grimmett Ebook All Chapter PDFdennis.evans606100% (9)
- A Study On Customer Service Quality of Banks in IndiaDocument58 pagesA Study On Customer Service Quality of Banks in Indiasakib50% (2)
- Grade 5 - Math - Module 5Document314 pagesGrade 5 - Math - Module 5Folker sNo ratings yet
- Vogt Valves Post Weld Heat Treatment of Socket Weld WalvesDocument7 pagesVogt Valves Post Weld Heat Treatment of Socket Weld Walvesgm_revankarNo ratings yet
- Munting SanggolDocument4 pagesMunting SanggolChan RabutazoNo ratings yet
- MOE ISB Application Form Revised On 14 October 2022Document6 pagesMOE ISB Application Form Revised On 14 October 2022Abhimanyu GunalanNo ratings yet
- Chicago Metro History FairDocument2 pagesChicago Metro History Fairapi-308852006No ratings yet
- B Box Datasheet BYD BatteriesDocument6 pagesB Box Datasheet BYD BatteriesC WaiteNo ratings yet
- School Motivation and Learning Strategies and College Readiness of Senior High School Graduates in The PhilippinesDocument8 pagesSchool Motivation and Learning Strategies and College Readiness of Senior High School Graduates in The PhilippinesElla TablizoNo ratings yet
- 00 Perhitungan Alat Besar 1-DeSKTOP-NJGKKH8Document359 pages00 Perhitungan Alat Besar 1-DeSKTOP-NJGKKH8Muhammad FakhrizalNo ratings yet
- Martensite and The Control of Retained AusteniteDocument6 pagesMartensite and The Control of Retained AusteniteMarcoTulioFonsecaNo ratings yet
- Index - Theosophia - Boris de ZirkoffDocument22 pagesIndex - Theosophia - Boris de ZirkoffMark R. JaquaNo ratings yet
- Master Sheet: Android / iOS DeveloperDocument31 pagesMaster Sheet: Android / iOS DeveloperGuyton LoboNo ratings yet
- PicoStocks Business PlanDocument17 pagesPicoStocks Business PlanJignesh ChaudharyNo ratings yet
- "I'm Your Number One Fan" A CLINICAL LOOK VWWDocument5 pages"I'm Your Number One Fan" A CLINICAL LOOK VWWfarhani afifahNo ratings yet
- Information Kit Summer School 2023 - V3Document13 pagesInformation Kit Summer School 2023 - V3Ufairanisa IslamatasyaNo ratings yet
- Determination of Nitrosamine ImpuritiesDocument8 pagesDetermination of Nitrosamine ImpuritiesRANJANA KADECHKARNo ratings yet
- Ceramic Tiles and Sanitary Ware Development Strategy PDFDocument247 pagesCeramic Tiles and Sanitary Ware Development Strategy PDFAmina CHAHBOUNINo ratings yet
- Ebook PDF The Western Heritage Volume 2 11th Edition PDFDocument41 pagesEbook PDF The Western Heritage Volume 2 11th Edition PDFclyde.garner999100% (39)
- Interpreting Multielement Geochemical Data: Scott Halley July 2015Document40 pagesInterpreting Multielement Geochemical Data: Scott Halley July 2015boby dwi herguariyanto supomoNo ratings yet
- Adamsonian Prayer and Mission & VisionDocument6 pagesAdamsonian Prayer and Mission & VisionRosselleneParasNo ratings yet