Download as pdf or txt
You might also like
- Introduction To Robotics Craig Solution ManualDocument154 pagesIntroduction To Robotics Craig Solution ManualChoe Jungwoo100% (1)
- Stress Strain TensorDocument13 pagesStress Strain TensorLight HouseNo ratings yet
- FEA Best Pract 19.0 M02 Element TheoryDocument58 pagesFEA Best Pract 19.0 M02 Element TheoryRama BaruvaNo ratings yet
- Stress Application ExampleDocument5 pagesStress Application Exampletemestruc71No ratings yet
- MESB333 Lab Manual (Uniten)Document73 pagesMESB333 Lab Manual (Uniten)Natalie Ninachuu0% (1)
- SolidWORKS (FEA) Simulation Theory ManualDocument115 pagesSolidWORKS (FEA) Simulation Theory ManualSusan Davis100% (2)
- Students ME2112 - A (Stress-Strain)Document14 pagesStudents ME2112 - A (Stress-Strain)dinodanoNo ratings yet
- Chapter 1 - 2Document19 pagesChapter 1 - 2AftabAli100% (1)
- ME 603: Applied Elasticity and Plasticity: Differential Equation and CompatibilityDocument33 pagesME 603: Applied Elasticity and Plasticity: Differential Equation and Compatibilityanon_999896239No ratings yet
- Mecánica de Los Fluidos II.: Integración de Ecuaciones de Navier Stokes (Clase 2)Document50 pagesMecánica de Los Fluidos II.: Integración de Ecuaciones de Navier Stokes (Clase 2)josedevianaNo ratings yet
- BME18R311: Biofluids and DynamicsDocument32 pagesBME18R311: Biofluids and DynamicsEbe Nezer GNo ratings yet
- Chapter 1Document42 pagesChapter 1jiminNo ratings yet
- Lecture 3 Theory of Elasticity and PlasticityDocument10 pagesLecture 3 Theory of Elasticity and PlasticityVinayak UntwaleNo ratings yet
- Pete 211 Hydrostatics: Hizmete OzelDocument43 pagesPete 211 Hydrostatics: Hizmete OzelrestofficalNo ratings yet
- CE 595 Section 1Document25 pagesCE 595 Section 1alberto_uniNo ratings yet
- Chapter 1Document19 pagesChapter 1Avy RAjNo ratings yet
- MANE 4240 & CIVL 4240 Introduction To Finite ElementsDocument40 pagesMANE 4240 & CIVL 4240 Introduction To Finite ElementsEr VenkatNo ratings yet
- Basic Equation of Theory of ElasticityDocument25 pagesBasic Equation of Theory of ElasticityAnnamalai VaidyanathanNo ratings yet
- Topic 3BDocument75 pagesTopic 3BMuhammad Hamza Bin TahirNo ratings yet
- CE 595: Finite Elements in Elasticity: Instructors: Amit Varma, Ph.D. Timothy M. Whalen, PH.DDocument25 pagesCE 595: Finite Elements in Elasticity: Instructors: Amit Varma, Ph.D. Timothy M. Whalen, PH.DSuresh Babu ANo ratings yet
- MANE 4240 & CIVL 4240 Introduction To Finite ElementsDocument40 pagesMANE 4240 & CIVL 4240 Introduction To Finite ElementsnihalNo ratings yet
- CE 595 Section 1Document25 pagesCE 595 Section 1Lucy BelleNo ratings yet
- 3D - 2D Elasticity and FEA (13) - ADocument43 pages3D - 2D Elasticity and FEA (13) - AAhmad NaeemNo ratings yet
- MANE 4240 & CIVL 4240 Introduction To Finite ElementsDocument40 pagesMANE 4240 & CIVL 4240 Introduction To Finite ElementsMarvinEboraNo ratings yet
- Chap 1 Stress-Strain Analysis: Finite Element Analysis and Design Nam-Ho KimDocument44 pagesChap 1 Stress-Strain Analysis: Finite Element Analysis and Design Nam-Ho KimPhan Lương Việt AnhNo ratings yet
- 03 - Torsion of Thin Walled Sections V3Document15 pages03 - Torsion of Thin Walled Sections V3Pythonraptor100% (1)
- Lectuer 1 Complex Stresses PDFDocument20 pagesLectuer 1 Complex Stresses PDFadel swar100% (1)
- Aircraft Design Day5Document35 pagesAircraft Design Day5arun_sanga1233515No ratings yet
- Slide Chpt02Document49 pagesSlide Chpt02yasinfanus149No ratings yet
- 02 Strain and Stress-Strain RelationsDocument74 pages02 Strain and Stress-Strain Relationsvân NamNo ratings yet
- Stress AnalysisDocument125 pagesStress Analysisrorosoto1No ratings yet
- Mechanics of Materials - : F M F F F M M MDocument36 pagesMechanics of Materials - : F M F F F M M MSathyaNo ratings yet
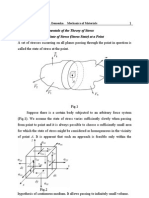
- LECTURE 7. Fundamentals of The Theory of Stress: 1. State of Stress (Stress State) at A PointDocument6 pagesLECTURE 7. Fundamentals of The Theory of Stress: 1. State of Stress (Stress State) at A Pointwinowich5813No ratings yet
- Chapter 7 - Strain EnergyDocument35 pagesChapter 7 - Strain EnergyWee Soon Chai100% (1)
- ModeladoDocument30 pagesModeladoSalvador Chairez GarciaNo ratings yet
- Lecture 2 Load and Stress Analysis Principal Stresses Principal StressesDocument16 pagesLecture 2 Load and Stress Analysis Principal Stresses Principal StressesAbdallah AL-AbbadiNo ratings yet
- Fluid FlowDocument9 pagesFluid FlowshanuNo ratings yet
- Stess Transformation EquationsDocument32 pagesStess Transformation EquationsM Shoaib AkramNo ratings yet
- MEng6302 Lecture 1 Fundamental Concepts ASM 2021Document17 pagesMEng6302 Lecture 1 Fundamental Concepts ASM 2021KKDhNo ratings yet
- Von-Mises Stress: ZX Yz Xy X Z Z y y X VDocument38 pagesVon-Mises Stress: ZX Yz Xy X Z Z y y X VFaryal BatoolNo ratings yet
- Structure: Chapter 1 - Plane Stress TransformationDocument18 pagesStructure: Chapter 1 - Plane Stress Transformationhasan bishNo ratings yet
- 122 Seismology and The Internal Structure of The EarthDocument2 pages122 Seismology and The Internal Structure of The EarthJustin HerneyNo ratings yet
- Continuum Mechanics-Lecture-2-20sept16 PDFDocument63 pagesContinuum Mechanics-Lecture-2-20sept16 PDFGirish DeshmukhNo ratings yet
- ME2112 - (Part 1) - 2D Stress and StrainDocument46 pagesME2112 - (Part 1) - 2D Stress and StraindinodanoNo ratings yet
- 12 - 3DElasticity 2 StuDocument41 pages12 - 3DElasticity 2 StuVaibhavNo ratings yet
- Gusset DrawingsDocument59 pagesGusset DrawingssivaNo ratings yet
- Aircraft Design Day6Document39 pagesAircraft Design Day6arun_sanga1233515100% (2)
- An Introduction TO Mechanics of Piping Stress Analysis (Part-II)Document16 pagesAn Introduction TO Mechanics of Piping Stress Analysis (Part-II)Jaydev ChakrabortyNo ratings yet
- ME2112 - (Part 1) - 2D Stress and Strain-L1Document6 pagesME2112 - (Part 1) - 2D Stress and Strain-L1lalalalaNo ratings yet
- MMK Bab 5Document96 pagesMMK Bab 5MaulitaNo ratings yet
- Lecture 1. Material Properties: Example 1. A Bottle of Watson's Water ( HK$6)Document15 pagesLecture 1. Material Properties: Example 1. A Bottle of Watson's Water ( HK$6)Fa HedaiatNo ratings yet
- Lecture Notes On MechanicsDocument129 pagesLecture Notes On MechanicsthanassarasNo ratings yet
- Intermediate Mechanics of Materials - Chapter 1Document22 pagesIntermediate Mechanics of Materials - Chapter 1Noble ChibudoNo ratings yet
- Force Stress Equilibrium Coveruing Multiaxial Strain and Multiaxial Stress S PDFDocument4 pagesForce Stress Equilibrium Coveruing Multiaxial Strain and Multiaxial Stress S PDFWaquar TaiyebNo ratings yet
- Cap1-DifferentialEquations 01 Eqns of MotionDocument6 pagesCap1-DifferentialEquations 01 Eqns of MotionLucas MarquesNo ratings yet
- Chapter 1+2: Mechanical Properties of MaterialsDocument60 pagesChapter 1+2: Mechanical Properties of MaterialsOmar AlzoubiNo ratings yet
- 12 FemDocument84 pages12 FemLohit BattuNo ratings yet
- Basic Theory of Elasticity: Problem Solvability: AE221 Flight Vehicle Structures / L3-4 / DRMDocument31 pagesBasic Theory of Elasticity: Problem Solvability: AE221 Flight Vehicle Structures / L3-4 / DRMAnmol KumarNo ratings yet
- Chapter 3-Soil 1Document135 pagesChapter 3-Soil 1Ruth Sangalang-GabrilloNo ratings yet
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64From EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- 재료의기계쩍물성 Chap3Document101 pages재료의기계쩍물성 Chap3Choe JungwooNo ratings yet
- TH Fdil Ti Theory of Dislocation: 2.1 Introduction To DislocationsDocument222 pagesTH Fdil Ti Theory of Dislocation: 2.1 Introduction To DislocationsChoe JungwooNo ratings yet
- CH Strengthening Strengthening Mechanisms Mechanisms: by Jae-Il JangDocument240 pagesCH Strengthening Strengthening Mechanisms Mechanisms: by Jae-Il JangChoe JungwooNo ratings yet
- Static FailureDocument62 pagesStatic FailureChoe JungwooNo ratings yet
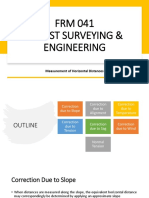
- Measurement of Horizontal Distances - CorrectionsDocument27 pagesMeasurement of Horizontal Distances - CorrectionsRicmar Magarin100% (1)
- Structural Design Sample Exams-95-96-97-98Document73 pagesStructural Design Sample Exams-95-96-97-98Arnel FreoNo ratings yet
- Analysis of Various Structural Members Considering Geometric NonlinearityDocument105 pagesAnalysis of Various Structural Members Considering Geometric Nonlinearityrehanmaaz100% (1)
- Section Modulus & Stress Calculation of Rail SectionDocument13 pagesSection Modulus & Stress Calculation of Rail SectionfiemsabyasachiNo ratings yet
- Em - 1110 1 1904 PDFDocument205 pagesEm - 1110 1 1904 PDFjoseeduardo31No ratings yet
- 2nd Year Physics Extra Short Question Punjab Board Chapter 12 To 17Document51 pages2nd Year Physics Extra Short Question Punjab Board Chapter 12 To 17qureshi0% (4)
- Engineering Data Users GuideDocument70 pagesEngineering Data Users GuideXinwei LiNo ratings yet
- Lecture32 PDFDocument32 pagesLecture32 PDFShubham BansalNo ratings yet
- Measuring The Rheology of Polymer SolutionsDocument13 pagesMeasuring The Rheology of Polymer Solutionsmushtaq521No ratings yet
- KULIAH3 EC3 UNRESTRAINED BEAM-kl PDFDocument66 pagesKULIAH3 EC3 UNRESTRAINED BEAM-kl PDFZazliana Izatti100% (1)
- Elmer TutorialsDocument81 pagesElmer TutorialsPutri Nur CahyantiNo ratings yet
- 1 - Introduction To UPV - Dave CorbettDocument42 pages1 - Introduction To UPV - Dave Corbettdimitrios25100% (3)
- Lab QuestionsDocument5 pagesLab QuestionsMohamed Salah0% (1)
- Theory of Elasticity - Timoshenko PDFDocument263 pagesTheory of Elasticity - Timoshenko PDFAndré Ferrari83% (6)
- 5 - New Developments in Elastic Fibers by JINLIANDocument28 pages5 - New Developments in Elastic Fibers by JINLIANnumichemNo ratings yet
- PEMA 2021 RP3 Polymers Diversity Adaptability Tbprinted (053-117)Document65 pagesPEMA 2021 RP3 Polymers Diversity Adaptability Tbprinted (053-117)Kevin AlfariziNo ratings yet
- Nonlinear Analysis of Reinforced Concrete Slabs at Elevated TemperatureDocument10 pagesNonlinear Analysis of Reinforced Concrete Slabs at Elevated TemperatureHuda JawadNo ratings yet
- Chapter 2: Mechanical Properties: Issues To Address or "Why Does This Matter?"Document40 pagesChapter 2: Mechanical Properties: Issues To Address or "Why Does This Matter?"Ryan MaxwellNo ratings yet
- Short Course Short Course: Modeling of Infill Frame Structures Modeling of Infill Frame StructuresDocument33 pagesShort Course Short Course: Modeling of Infill Frame Structures Modeling of Infill Frame StructuresMohit KohliNo ratings yet
- AbaqusExplicit Honeycomb Material ModelDocument6 pagesAbaqusExplicit Honeycomb Material Modeladiraju07100% (1)
- Spiros Zinelis, William A. Brantley Auth., Theodore Eliades Eds. Research Methods in Orthodontics A Guide To Understanding Orthodontic ResearchDocument224 pagesSpiros Zinelis, William A. Brantley Auth., Theodore Eliades Eds. Research Methods in Orthodontics A Guide To Understanding Orthodontic Researchgriffone1No ratings yet
- Axis: G Storey: 1: Bending (Top Edge) ..Document38 pagesAxis: G Storey: 1: Bending (Top Edge) ..ariesibaraniNo ratings yet
- Selección de MaterialesDocument39 pagesSelección de MaterialesRaulNo ratings yet
- Seismic Design of Reinforced Concrete and Masonry Buildings - T.paulay, M.priestley (1992) - +Document764 pagesSeismic Design of Reinforced Concrete and Masonry Buildings - T.paulay, M.priestley (1992) - +Freddy Mauricio Lucay88% (8)
- Computational Materials ScienceDocument402 pagesComputational Materials Sciencepeyman100% (1)
- Ctopher Matls 070508 sw2008Document56 pagesCtopher Matls 070508 sw2008d_menetNo ratings yet
- Compression ManualDocument23 pagesCompression Manualxxazninvasionxx2697No ratings yet
- ATENA-Engineering Example Manual PDFDocument90 pagesATENA-Engineering Example Manual PDFHugo Kstelblanco RNo ratings yet