Download as pdf or txt
You might also like
- Encyclopedia of Korean Folk BeliefsDocument167 pagesEncyclopedia of Korean Folk BeliefsAria7No ratings yet
- VITO 762 Installation GuideDocument36 pagesVITO 762 Installation GuideThái Ngọc0% (1)
- Theory and Technology To ControlDocument10 pagesTheory and Technology To ControlJose LuisNo ratings yet
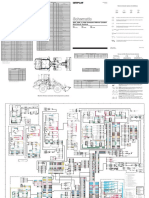
- 902, 906, & 908 Compact Wheel Loader Electrical System: Machine Harness Connector and Component LocationsDocument2 pages902, 906, & 908 Compact Wheel Loader Electrical System: Machine Harness Connector and Component Locationsait mimouneNo ratings yet
- Pull Up EbookDocument12 pagesPull Up EbookDanko Kovačević100% (2)
- Design Guide 7 Pinned Base Plate Connections For Columns Contents and Preface Bk745Document7 pagesDesign Guide 7 Pinned Base Plate Connections For Columns Contents and Preface Bk745Hebert Rodriguez0% (8)
- Msma PDFDocument100 pagesMsma PDFMimi Aireen Harmira HassimNo ratings yet
- Nutrient Film Technique NFT Hydroponic Nutrition CDocument11 pagesNutrient Film Technique NFT Hydroponic Nutrition Cmegalanrajendiran18No ratings yet
- Nutrient Film Technique (NFT) Hydroponic Monitoring System: Helmy, Arif Nursyahid, Thomas Agung Setyawan, Abu HasanDocument6 pagesNutrient Film Technique (NFT) Hydroponic Monitoring System: Helmy, Arif Nursyahid, Thomas Agung Setyawan, Abu HasaniqbalNo ratings yet
- Automated PH Controller System For HydroponicDocument5 pagesAutomated PH Controller System For HydroponicChaitanya Sunkara50% (2)
- Article - Crisnapati - 2017-Hydroponic Management and Monitoring System For An IOT Based NFT Farm Using Web TechnologyDocument6 pagesArticle - Crisnapati - 2017-Hydroponic Management and Monitoring System For An IOT Based NFT Farm Using Web TechnologyRoberto VelazquezNo ratings yet
- Development of Automated Monitoring System For HydroponicsDocument9 pagesDevelopment of Automated Monitoring System For HydroponicsChristine FloresNo ratings yet
- Designing and Implementing The Arduino-Based Nutrition Feeding Automation System of A Prototype Scaled Nutrient Film Technique (NFT) Hydroponics Using Total Dissolved Solids (TDS) ..Document7 pagesDesigning and Implementing The Arduino-Based Nutrition Feeding Automation System of A Prototype Scaled Nutrient Film Technique (NFT) Hydroponics Using Total Dissolved Solids (TDS) ..jenixson tamondongNo ratings yet
- Hydroponics Automated System Using Machine LearningDocument5 pagesHydroponics Automated System Using Machine LearningAmithNo ratings yet
- The Control System For The Nutrition ConcentrationDocument10 pagesThe Control System For The Nutrition ConcentrationSeptian Andi GunawanNo ratings yet
- ProposalDocument17 pagesProposalKhairul AkmalNo ratings yet
- Sample Project ReportDocument25 pagesSample Project ReportFelinus MtajwahaNo ratings yet
- 5787-Article Text-17080-1-10-20210311Document7 pages5787-Article Text-17080-1-10-20210311encengNo ratings yet
- Development of Fish Pond Monitoring and Automation SystemDocument5 pagesDevelopment of Fish Pond Monitoring and Automation SystemBayeNo ratings yet
- 344-Article Text-1295-1-10-20190630Document22 pages344-Article Text-1295-1-10-20190630NewRiverXNo ratings yet
- Automation and Monitoring For Aquaponic System BasDocument11 pagesAutomation and Monitoring For Aquaponic System BaslaurestadryxNo ratings yet
- Weather Prediction Based On Fuzzy Logic AlgorithmDocument6 pagesWeather Prediction Based On Fuzzy Logic AlgorithmHadi JameelNo ratings yet
- 8c38 PDFDocument9 pages8c38 PDFprashant7819No ratings yet
- Automated Hydroponics Nutrition Plants Systems Using Arduino Uno Microcontroller Based On AndroidDocument7 pagesAutomated Hydroponics Nutrition Plants Systems Using Arduino Uno Microcontroller Based On Androidsalvatore raffaNo ratings yet
- Ec Sawi Pakcoy BaruDocument4 pagesEc Sawi Pakcoy BaruNurul KhotimhNo ratings yet
- A Monitoring and Control SystemDocument21 pagesA Monitoring and Control SystemBayeNo ratings yet
- Hydroponic System PDFDocument9 pagesHydroponic System PDFAnand Prakash DwivediNo ratings yet
- NFT Hydroponic Control Using Mamdani Fuzzy InferenDocument10 pagesNFT Hydroponic Control Using Mamdani Fuzzy Inferenluis anthony bocanegra uturuncoNo ratings yet
- Hydroponic FarmDocument12 pagesHydroponic FarmAbdullahi AwwalNo ratings yet
- Acid Insoluble Ash As A Marker To Estimate Feed WastageDocument3 pagesAcid Insoluble Ash As A Marker To Estimate Feed WastageBrix SabsNo ratings yet
- Design of A Hydroponic Monitoring System With Deep Flow Technique (DFT)Document8 pagesDesign of A Hydroponic Monitoring System With Deep Flow Technique (DFT)DzawinNo ratings yet
- Aplikasi PLC Untuk Mengendalikan Lingkungan Pertumbuhan Tanaman Krisan Pada Sistem Ebb and FlowDocument6 pagesAplikasi PLC Untuk Mengendalikan Lingkungan Pertumbuhan Tanaman Krisan Pada Sistem Ebb and FlowArif Al-mukminNo ratings yet
- Development of Fish Pond Monitoring and Control System: M. J. Atta and J. TsadoDocument1 pageDevelopment of Fish Pond Monitoring and Control System: M. J. Atta and J. TsadoBayeNo ratings yet
- Journal of Agricultural Engineering and Biotechnology Vol. 2 (3), PP. 36-48 August, 2014 PDFDocument13 pagesJournal of Agricultural Engineering and Biotechnology Vol. 2 (3), PP. 36-48 August, 2014 PDFAssociate Professor Dr. Said Elshahat AbdallahNo ratings yet
- Aqua Ponic SDocument6 pagesAqua Ponic SWilson Roberto Sanchez SolanoNo ratings yet
- 248Document12 pages248NunNo ratings yet
- Solar Powered Automated Fertigation Control SystemDocument10 pagesSolar Powered Automated Fertigation Control SystemHuy Vũ GiaNo ratings yet
- Hydro-21-Chapter 1Document26 pagesHydro-21-Chapter 1Paulechelle Iligan100% (1)
- 827 24.automated Hydroponic SystemDocument4 pages827 24.automated Hydroponic Systemazeemahmar901No ratings yet
- Automated PH Monitoring and Controlling System For Hydroponics Under Greenhouse ConditionDocument12 pagesAutomated PH Monitoring and Controlling System For Hydroponics Under Greenhouse Conditionamy lizbeth ricoNo ratings yet
- E-Nose System To Detect E-Coli in Drinking Water of Udupi DistrictDocument7 pagesE-Nose System To Detect E-Coli in Drinking Water of Udupi DistrictIJERDNo ratings yet
- Smart Green House'S Hydroponic With Arduiono UnoDocument4 pagesSmart Green House'S Hydroponic With Arduiono Unozulkarnaen panggabeanNo ratings yet
- Automated Aquaponics Maintenance SystemDocument7 pagesAutomated Aquaponics Maintenance SystemTejas MayekarNo ratings yet
- Ehac24 PDFDocument7 pagesEhac24 PDFAnonymous BSNjp4No ratings yet
- PLC Chicken House ModelDocument4 pagesPLC Chicken House ModelAnonymous zPITtGkrNo ratings yet
- Automation of Hydroponic SystemDocument3 pagesAutomation of Hydroponic SystemIJSTENo ratings yet
- Design of Ebb and Flow Automatic Hydroponic System For Chilli Pepper CultivationDocument8 pagesDesign of Ebb and Flow Automatic Hydroponic System For Chilli Pepper CultivationmujibNo ratings yet
- Measurement of NPK From PH ValueDocument6 pagesMeasurement of NPK From PH ValueDishant SonawaneNo ratings yet
- Slide PresentationDocument13 pagesSlide PresentationNafisah RealaNo ratings yet
- Iii. U: Analisis Tingkat Error Sistem Pengaturan Salinitas Air Pembenihan Budidaya Udang GalahDocument8 pagesIii. U: Analisis Tingkat Error Sistem Pengaturan Salinitas Air Pembenihan Budidaya Udang GalahDifa LaudzaNo ratings yet
- Design of A Portable Urine Glucose Monitoring System For Health CareDocument12 pagesDesign of A Portable Urine Glucose Monitoring System For Health CareaksssudhakarNo ratings yet
- Establishment of A Gaseous PH Control Concept in MicrobioreactorsDocument7 pagesEstablishment of A Gaseous PH Control Concept in MicrobioreactorsMancamiaicuruNo ratings yet
- Chapters 7copiesDocument52 pagesChapters 7copiesAnvitha RNo ratings yet
- A Study On Dairy Wastewater Using Fixed-Film Fixed Bed Anaerobic Diphasic DigesterDocument4 pagesA Study On Dairy Wastewater Using Fixed-Film Fixed Bed Anaerobic Diphasic DigesterSisay Derso MengeshaNo ratings yet
- AH ProposalDocument5 pagesAH ProposalAfifah YusufNo ratings yet
- IoT Based Automatic Monitoring System For Water Nutrition On Aquaponics SystemDocument11 pagesIoT Based Automatic Monitoring System For Water Nutrition On Aquaponics SystemMike CNo ratings yet
- Chapter OneDocument47 pagesChapter Onewako safayiNo ratings yet
- Sensors 15 22941Document15 pagesSensors 15 22941guiburNo ratings yet
- Engenharia Agrícola: Low-Cost Automation of Fertigation With Programmable Logic Controller and Gas-Filled SensorsDocument15 pagesEngenharia Agrícola: Low-Cost Automation of Fertigation With Programmable Logic Controller and Gas-Filled SensorsMuhammad MajdiNo ratings yet
- 6005-Article Text-17638-1-10-20211221Document10 pages6005-Article Text-17638-1-10-20211221GEAN CARLO ANGELES CHAVESTANo ratings yet
- On Fuzzy Logic Based Model For Irrigation Controller UsingDocument4 pagesOn Fuzzy Logic Based Model For Irrigation Controller UsingChrisNo ratings yet
- 2013-File Utama Naskah-5006-2-10-20210408Document7 pages2013-File Utama Naskah-5006-2-10-20210408Frengki SimatupangNo ratings yet
- Sensors 18 01333 CompressedDocument16 pagesSensors 18 01333 CompressedJorge Ivan Soto SernaNo ratings yet
- Mass Spectrometry and Stable Isotopes in Nutritional and Pediatric ResearchFrom EverandMass Spectrometry and Stable Isotopes in Nutritional and Pediatric ResearchHenk SchierbeekNo ratings yet
- Advances in Dairy ProductsFrom EverandAdvances in Dairy ProductsFrancesco ContoNo ratings yet
- Advanced Techniques and Methods in Aquaculture EngineeringFrom EverandAdvanced Techniques and Methods in Aquaculture EngineeringNo ratings yet
- LIFESTYLE INTERNATIONAL Private Limited - My Colourful Kitchen 2021-22Document49 pagesLIFESTYLE INTERNATIONAL Private Limited - My Colourful Kitchen 2021-22chaitanya.maisaNo ratings yet
- Product Range: Trelleborg Se Aling SolutionsDocument39 pagesProduct Range: Trelleborg Se Aling SolutionssandeepNo ratings yet
- 3b Domestic Water Meter Installation in Meter Room GuidelinesDocument10 pages3b Domestic Water Meter Installation in Meter Room GuidelinesVinish HARIDAS NAIRNo ratings yet
- Antares Eng Rev02Document2 pagesAntares Eng Rev02Steven BrownNo ratings yet
- ME542 4thDocument28 pagesME542 4thAhmed SalemNo ratings yet
- RABE - Sexual Imagery On The Phantasmagorical Castles at KhajurahoDocument30 pagesRABE - Sexual Imagery On The Phantasmagorical Castles at KhajurahoMarco PassavantiNo ratings yet
- Chapters: 10 Date: Total Marks: 30 TimeDocument2 pagesChapters: 10 Date: Total Marks: 30 TimeseakanugaNo ratings yet
- Italian P-38Document10 pagesItalian P-38pacueroNo ratings yet
- Lucas Generator and Control Box TestsDocument28 pagesLucas Generator and Control Box TestssunhuynhNo ratings yet
- Chemistry Practical Procedure Systematic Analysis of Salt STD: Xi & XiiDocument9 pagesChemistry Practical Procedure Systematic Analysis of Salt STD: Xi & XiivarshiniNo ratings yet
- Singer 291U1, U3Document46 pagesSinger 291U1, U3Datum VivelacriqueNo ratings yet
- Honeywell Vesda VEP Engineering Specification Document 0219Document18 pagesHoneywell Vesda VEP Engineering Specification Document 0219Shekhar AmbreNo ratings yet
- Carlos Xuma - Dating Dynamics - Getting Men More Success With Women (2005)Document47 pagesCarlos Xuma - Dating Dynamics - Getting Men More Success With Women (2005)Retaliator StrikesbackNo ratings yet
- GEA Chapter6 Economy HiresDocument37 pagesGEA Chapter6 Economy HiresMike LassaNo ratings yet
- Mulcher TSS: User Maintenance Manual - Spare PartsDocument35 pagesMulcher TSS: User Maintenance Manual - Spare PartsSerdar FildisNo ratings yet
- Rate of Burning And/or Extent and Time of Burning of Plastics in A Horizontal PositionDocument8 pagesRate of Burning And/or Extent and Time of Burning of Plastics in A Horizontal PositionjoseNo ratings yet
- Tech Mahindra Antonyms and QuestionsDocument27 pagesTech Mahindra Antonyms and QuestionsNehaNo ratings yet
- Content Expectations: Quick Response PDCA Assignment / Breakdown Factor Tree Analysis 5 Why Analysis PDCADocument31 pagesContent Expectations: Quick Response PDCA Assignment / Breakdown Factor Tree Analysis 5 Why Analysis PDCAdysonNo ratings yet
- Differential Equations MSC MathematicsDocument2 pagesDifferential Equations MSC MathematicsSamadNo ratings yet
- XV NATCOSEB First CircularDocument2 pagesXV NATCOSEB First CircularMn HbkNo ratings yet
- 193 Series - Hammond ChokeDocument2 pages193 Series - Hammond ChokeMario RossiNo ratings yet
- GR8313 GrenergyDocument9 pagesGR8313 GrenergyAngel Luis Aquino GonzalezNo ratings yet
- Introduction To Privatisation and Liberalisation in India: by Anmol SharmaDocument10 pagesIntroduction To Privatisation and Liberalisation in India: by Anmol SharmaAnmol SharmaNo ratings yet
- Push Pull (Cascade) DespieceDocument20 pagesPush Pull (Cascade) DespieceAntonio Vargas ZarateNo ratings yet