Download as pdf or txt
You might also like
- Jet Frame 625 Move Tool - ENG PDFDocument94 pagesJet Frame 625 Move Tool - ENG PDFAndrés Echavarria CárdenasNo ratings yet
- Pozitioner Analogic AVIDDocument14 pagesPozitioner Analogic AVIDPop-Coman Simion100% (2)
- Pid-Applied Control Systems (Proportional Plus Integral Plus Derivative Control)Document28 pagesPid-Applied Control Systems (Proportional Plus Integral Plus Derivative Control)hiltoneng100% (1)
- Week 12 - Control SystemDocument30 pagesWeek 12 - Control SystemAzizan Anuar100% (1)
- Lecture 1 & 2 - 2Document37 pagesLecture 1 & 2 - 2Awais0040% (1)
- Week1 PDFDocument24 pagesWeek1 PDFatifhashmi92No ratings yet
- Control SystemDocument1 pageControl Systemvarathanps0% (2)
- Linear Programming SIMPLEX METHODDocument18 pagesLinear Programming SIMPLEX METHODNicole Vinarao100% (1)
- Radio Navigation Systems. (ECE358)Document3 pagesRadio Navigation Systems. (ECE358)scribNo ratings yet
- Proportional ControllersDocument18 pagesProportional ControllersUmair MajeedNo ratings yet
- Progress Report: Doctoral Programme in Biological and Environmental ScienceDocument4 pagesProgress Report: Doctoral Programme in Biological and Environmental Sciencegoitom01No ratings yet
- (Ebook) Tuning of Fuzzy Pid Controllers PDFDocument22 pages(Ebook) Tuning of Fuzzy Pid Controllers PDFJessica VélezNo ratings yet
- Chapter 6 PID ControlDocument56 pagesChapter 6 PID ControlHana Muhammad100% (1)
- Unit 3: Comparators (Net Research Oriented) (1 Day) Study of Comparator System, Types of ComparatorDocument2 pagesUnit 3: Comparators (Net Research Oriented) (1 Day) Study of Comparator System, Types of Comparatoratul96_aphNo ratings yet
- Automatic Control of Hydraulic Machine Using PLCDocument5 pagesAutomatic Control of Hydraulic Machine Using PLCIJSTENo ratings yet
- FAR3000 Operator's Manual PDFDocument463 pagesFAR3000 Operator's Manual PDFHerdian Trias SumadinataNo ratings yet
- GAS Sampling SG26404 Electrical DrawingsDocument17 pagesGAS Sampling SG26404 Electrical DrawingsSergei KurpishNo ratings yet
- IE6404 Production Planning and Control: Course MaterialsDocument15 pagesIE6404 Production Planning and Control: Course MaterialsJosé Manuel Slater CarrascoNo ratings yet
- What Do These Two Have in Common?: Why Do We Study Control Systems?Document7 pagesWhat Do These Two Have in Common?: Why Do We Study Control Systems?Gokul Raj100% (1)
- Introduction To Operations Research PDFDocument120 pagesIntroduction To Operations Research PDFchirag yadav100% (1)
- 271 Introduction To Process Control Course DescriptionDocument2 pages271 Introduction To Process Control Course DescriptionAdrian Reyes100% (1)
- Lecture 2 PDFDocument16 pagesLecture 2 PDFsatheeshsep24No ratings yet
- Week 1 - Intro To Control SystemsDocument45 pagesWeek 1 - Intro To Control SystemsArkie BajaNo ratings yet
- What Is PID - TutorialDocument5 pagesWhat Is PID - Tutorialsocrates19582405No ratings yet
- Proportional ControlDocument3 pagesProportional Controlyuj oNo ratings yet
- Simulator ManualDocument29 pagesSimulator Manualnubbler0% (1)
- Delomatic 400 Hydro Data SheetDocument14 pagesDelomatic 400 Hydro Data SheetFedilino P. FornollesNo ratings yet
- Introduction To Linear ProgrammingDocument34 pagesIntroduction To Linear ProgrammingDeepika Raj100% (1)
- Auto Tuning of Pid Controller Using Swarm IntelligenceDocument9 pagesAuto Tuning of Pid Controller Using Swarm IntelligenceWalid Mohamed AlyNo ratings yet
- P, PI and PID Controllers - A Comparative StudyDocument6 pagesP, PI and PID Controllers - A Comparative StudySushil NamoijamNo ratings yet
- Bently 3300 - 55 ManualDocument6 pagesBently 3300 - 55 Manualwagner machado de moraesNo ratings yet
- Process Control LessonDocument1 pageProcess Control LessonAnonymous JDXbBDBNo ratings yet
- Automatic Control Systems Lecture NotesDocument11 pagesAutomatic Control Systems Lecture NotesĐăng TrọngNo ratings yet
- Thinktop v50 v70 en ImDocument29 pagesThinktop v50 v70 en ImKwameOpareNo ratings yet
- Paper 59-Marine Engine Room Alarm Monitoring SystemDocument9 pagesPaper 59-Marine Engine Room Alarm Monitoring Systemthomas1313No ratings yet
- Introduction To The Fundamentals of Control System ECEDocument68 pagesIntroduction To The Fundamentals of Control System ECEEdward FernandezNo ratings yet
- Electronic Instrumentation & Control SystemsDocument76 pagesElectronic Instrumentation & Control SystemsshahnawazuddinNo ratings yet
- Service Brochure V1 - 0Document20 pagesService Brochure V1 - 0georgios giatroudakisNo ratings yet
- Instrumentation and ControlDocument25 pagesInstrumentation and ControlPTk Daryl Cabañero TayongNo ratings yet
- Modbus ManualDocument93 pagesModbus ManualjunsanaNo ratings yet
- TankMaster WinSetup - User's GuideDocument278 pagesTankMaster WinSetup - User's GuideSantiago OrtizNo ratings yet
- Communication InterfaceDocument45 pagesCommunication Interfaceprabhabathi devi100% (1)
- Or Lecture 1 Linear ProgrammingDocument51 pagesOr Lecture 1 Linear ProgrammingShatterheart06 Wattpad100% (1)
- P-Link Module PE-link Module: User'S ManualDocument61 pagesP-Link Module PE-link Module: User'S ManualNgọc Nguyễn ThanhNo ratings yet
- Control System EngineeringDocument2 pagesControl System EngineeringmaheshNo ratings yet
- Controller Design For Controlling Water Level Control MechanismDocument24 pagesController Design For Controlling Water Level Control MechanismKasehun Getinet KitilaNo ratings yet
- Servo Motor and Servo MechanismDocument11 pagesServo Motor and Servo MechanismkloirywbdNo ratings yet
- How To Repair Nakakita Temp ControllerDocument6 pagesHow To Repair Nakakita Temp ControllerMariusz OlejkoNo ratings yet
- 3bnm005401 - D109 Technical DataDocument9 pages3bnm005401 - D109 Technical DatafloreabanciuNo ratings yet
- 998-22735626 - Software Tools - GMA - BrochureDocument20 pages998-22735626 - Software Tools - GMA - Brochureabderraoufdob2No ratings yet
- Implementation of Condition Based Maintenance For MediumDocument4 pagesImplementation of Condition Based Maintenance For Medium__kami__No ratings yet
- Smart OdmeDocument2 pagesSmart Odmeေအာင္ ေက်ာ္ မုိးNo ratings yet
- PS2 Positioner Calibration ProcedureDocument6 pagesPS2 Positioner Calibration ProcedureSakthi Sekar Cbi100% (1)
- Mec2407: Electromechanics Fluid Power System - Pneumatic SystemDocument12 pagesMec2407: Electromechanics Fluid Power System - Pneumatic SystemEdwin Jesu DassNo ratings yet
- Swylite LST200 Instruction SheetDocument2 pagesSwylite LST200 Instruction Sheetgreen8019No ratings yet
- Compass AdjustorDocument6 pagesCompass Adjustormhegden100% (1)
- Qmi Em5 ManualDocument88 pagesQmi Em5 ManualBenja87No ratings yet
- Practical Process Control System Questions & Answers - 15 - NEWSDocument3 pagesPractical Process Control System Questions & Answers - 15 - NEWSebenazzouzNo ratings yet
- List Control System - Anti-HeelingDocument19 pagesList Control System - Anti-HeelingYao WeiNo ratings yet
- Chapter 2: Optimum Controller Chapter 2: Optimum Controller Settings Settings GGDocument5 pagesChapter 2: Optimum Controller Chapter 2: Optimum Controller Settings Settings GGLakshmiNo ratings yet
- Task2 1 Specific Training-EnDocument35 pagesTask2 1 Specific Training-EnSantiago LarrazNo ratings yet
- State Space Equation: Quiz 2-EDocument5 pagesState Space Equation: Quiz 2-Ejin kazamaNo ratings yet
- Adaptive Neuro-Fuzzy Inference System: Dr. Sadeq D. Al-MajidiDocument11 pagesAdaptive Neuro-Fuzzy Inference System: Dr. Sadeq D. Al-Majidijin kazamaNo ratings yet
- Particle Swarm Optimisation: Dr. Sadeq D. Al-MajidiDocument10 pagesParticle Swarm Optimisation: Dr. Sadeq D. Al-Majidijin kazamaNo ratings yet
- Pole Placement: Dr. Sadeq Al-MajidiDocument19 pagesPole Placement: Dr. Sadeq Al-Majidijin kazamaNo ratings yet
- Root Locus Analysis in Z Plane: Dr. Sadeq Al-MajidiDocument10 pagesRoot Locus Analysis in Z Plane: Dr. Sadeq Al-Majidijin kazamaNo ratings yet
- Stability in Z Plane: Dr. Sadeq Al-MajidiDocument11 pagesStability in Z Plane: Dr. Sadeq Al-Majidijin kazamaNo ratings yet
- Root Locus Analysis in Z Plane: ExampleDocument5 pagesRoot Locus Analysis in Z Plane: Examplejin kazamaNo ratings yet
- Digital Control Engineering: Dr. Sadeq Al-MajidiDocument13 pagesDigital Control Engineering: Dr. Sadeq Al-Majidijin kazamaNo ratings yet
- Tuning of PID Controller: Dr. Sadeq Al-MajidiDocument11 pagesTuning of PID Controller: Dr. Sadeq Al-Majidijin kazamaNo ratings yet
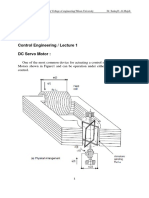
- Control Engineering / Lecture 1 DC Servo MotorDocument7 pagesControl Engineering / Lecture 1 DC Servo Motorjin kazamaNo ratings yet
- Digital Control Engineering: ExampleDocument7 pagesDigital Control Engineering: Examplejin kazamaNo ratings yet
- Example About PID Controller: Dr. Sadeq Al-MajidiDocument6 pagesExample About PID Controller: Dr. Sadeq Al-Majidijin kazamaNo ratings yet
- XP-Builder Programming BookDocument674 pagesXP-Builder Programming BookAyman Elsayed0% (1)
- Introduction To Programming The PIC32Document17 pagesIntroduction To Programming The PIC32Kim Breet100% (3)
- Interaction With The Physical World: Embedded SoftwareDocument12 pagesInteraction With The Physical World: Embedded Softwarevenkateshabc1234No ratings yet
- CC MCQDocument9 pagesCC MCQAtif Hameed MaharNo ratings yet
- Logcat 1618761333927Document14 pagesLogcat 1618761333927George DomusciuNo ratings yet
- Oracle Spatial DB - TutorialDocument51 pagesOracle Spatial DB - Tutorialnsladoje5415No ratings yet
- Ec2037 - Multimedia Compression and CommunicationDocument2 pagesEc2037 - Multimedia Compression and CommunicationdjarulrajNo ratings yet
- Oracle Essbase 11.1.2 Bootcamp (11.1.2.4) : Codice Durata Prezzo Lingua ModalitàDocument3 pagesOracle Essbase 11.1.2 Bootcamp (11.1.2.4) : Codice Durata Prezzo Lingua ModalitàSarwar GolamNo ratings yet
- Computer Worksheet (1.3, 1.4) G3Document8 pagesComputer Worksheet (1.3, 1.4) G3tinneNo ratings yet
- Résumés, Applications, and Cover Letters: by Olivia CrosbyDocument13 pagesRésumés, Applications, and Cover Letters: by Olivia Crosby407melville1596No ratings yet
- Group BDocument28 pagesGroup BRamon NemeñoNo ratings yet
- How To Recycle Unnecessary Catalog Tapes For Normal BackupsDocument4 pagesHow To Recycle Unnecessary Catalog Tapes For Normal BackupsamsreekuNo ratings yet
- L7 - Flip-Flops and Sequential Circuit DesignDocument41 pagesL7 - Flip-Flops and Sequential Circuit DesignSuresh Thallapelli100% (1)
- Creating Test PlanDocument16 pagesCreating Test PlantempnameNo ratings yet
- Enterprise Resource Planning - Erp: Muhammad AliDocument16 pagesEnterprise Resource Planning - Erp: Muhammad AliBenjamin adeelNo ratings yet
- Sample Permission LetterDocument2 pagesSample Permission LetterChimNo ratings yet
- MSI Motherboard Manual For B360M PRO-VD/ B360M PRO-VH/ B360M ICAFE/ B360M FIRE/ B360M WINDDocument150 pagesMSI Motherboard Manual For B360M PRO-VD/ B360M PRO-VH/ B360M ICAFE/ B360M FIRE/ B360M WINDgilipterotNo ratings yet
- COBIT 2019 Design Toolkit With Description - Group X.XLSX - CanvasDocument8 pagesCOBIT 2019 Design Toolkit With Description - Group X.XLSX - CanvasAulia NisaNo ratings yet
- User GuideDocument3 pagesUser GuideJosh GowardNo ratings yet
- Nischita Paudel N4 Week-6Document14 pagesNischita Paudel N4 Week-6Nissita PdlNo ratings yet
- Read Me First (TutFlix - Org)Document1 pageRead Me First (TutFlix - Org)Herr DirektorNo ratings yet
- Computer Fundamentals TutorialspointDocument54 pagesComputer Fundamentals TutorialspointGlomarie Torres DelfinNo ratings yet
- Python Unit 2Document145 pagesPython Unit 2Rupesh kumarNo ratings yet
- Purpose: Using NCPA For Passive ChecksDocument10 pagesPurpose: Using NCPA For Passive ChecksMarco ParodiNo ratings yet
- LogDocument2 pagesLog1000 SUBSCRIBERS WITHOUT ANY VIDEONo ratings yet
- Flipkart - Resume DeckDocument8 pagesFlipkart - Resume DeckAtharva2001No ratings yet
- Install Guide - Apple Shake 4Document5 pagesInstall Guide - Apple Shake 4shu2uNo ratings yet
- CM WDDBA Level 3Document41 pagesCM WDDBA Level 3moges tesfayeNo ratings yet
- PTZ4K12G FNDI X30 - WebrDocument4 pagesPTZ4K12G FNDI X30 - WebrMatiasPGNo ratings yet