
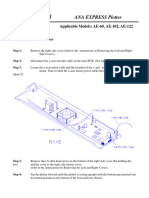
ESLe Y-Axis
ESLe Y-Axis
You might also like
- Mesa Quirurgica Opt 70 Ec 02 PDFDocument36 pagesMesa Quirurgica Opt 70 Ec 02 PDFTEYLER BARBOZANo ratings yet
- Printbar RemovalDocument21 pagesPrintbar RemovalTaur1968100% (1)
- Kearney and Trecker Installation ManualDocument12 pagesKearney and Trecker Installation Manualaa987100% (1)
- Report On Four Bar Mechanism of Sewing MachineDocument8 pagesReport On Four Bar Mechanism of Sewing MachineshazedislamNo ratings yet
- RepymotDocument4 pagesRepymotEngin UzunNo ratings yet
- Qauntum FRU Y Trayrobot Scalar I40 I80 RevADocument26 pagesQauntum FRU Y Trayrobot Scalar I40 I80 RevAScramble 69No ratings yet
- Ex 4650Document16 pagesEx 4650Ulzii AltansukhNo ratings yet
- Inverter Mid Power Assembly ReplacementDocument13 pagesInverter Mid Power Assembly ReplacementRubén Cadima BarrientosNo ratings yet
- HP p3015 50.3 ErrorDocument4 pagesHP p3015 50.3 Errorwinner mediaNo ratings yet
- Surgical C-Arm Tables: Service ManualDocument80 pagesSurgical C-Arm Tables: Service ManualArt Messick100% (1)
- Aste-6z8l9t r0 enDocument3 pagesAste-6z8l9t r0 enfilip_kecNo ratings yet
- Exp 9 Introduction To MachinesDocument11 pagesExp 9 Introduction To MachinesMuhammad AwaisNo ratings yet
- Eaton CM-52 Remote Racking IL02400003EDocument16 pagesEaton CM-52 Remote Racking IL02400003EadvancedmotorNo ratings yet
- WheelHorse Electric Lift Accessory For Long Frame Tractors 8-4221Document4 pagesWheelHorse Electric Lift Accessory For Long Frame Tractors 8-4221Kevins Small Engine and Tractor ServiceNo ratings yet
- Planmed Sophie Part2 - ServicemanualDocument99 pagesPlanmed Sophie Part2 - ServicemanualOscar Orea100% (1)
- Manual de Servicio Inogen One - g3Document134 pagesManual de Servicio Inogen One - g3carlos andres hoyos perdomoNo ratings yet
- 7 Frame and WheelDocument12 pages7 Frame and Wheelalsief1951No ratings yet
- Chapter H - Parts Replacement & Repair Replacing Sensors & SwitchesDocument99 pagesChapter H - Parts Replacement & Repair Replacing Sensors & SwitchesolegNo ratings yet
- Maintenance Manual For BBS-V800 202109Document15 pagesMaintenance Manual For BBS-V800 202109thaungmtNo ratings yet
- Electrical Wireline Spooler User ManualDocument14 pagesElectrical Wireline Spooler User ManualJohn SimancaNo ratings yet
- B-3801 IOM - Rev - 2011-09-02 (1) MidlandDocument23 pagesB-3801 IOM - Rev - 2011-09-02 (1) MidlandLucas MonteNo ratings yet
- Xserve Raid Left or Right Light PipeDocument11 pagesXserve Raid Left or Right Light PipeRoberto BruniNo ratings yet
- Rack Installation Instructions: GuidelinesDocument16 pagesRack Installation Instructions: Guidelinesovidiu981No ratings yet
- Mini X Motor Replacement With Fan UpgradeDocument7 pagesMini X Motor Replacement With Fan UpgradeLucian ComanNo ratings yet
- UH-60A EH60A: RemovalDocument2 pagesUH-60A EH60A: RemovalaugustinhodjNo ratings yet
- RepheadDocument4 pagesRepheadEngin UzunNo ratings yet
- Quick Start Ex4600Document10 pagesQuick Start Ex4600Елена ШевчукNo ratings yet
- Balança 4182-A (Mecanica) - Revisão 02.08.2007 PDFDocument12 pagesBalança 4182-A (Mecanica) - Revisão 02.08.2007 PDFKadson AmaralNo ratings yet
- AA06058 Modificacion de La Caja de Resistencia Camion 129 y 130Document7 pagesAA06058 Modificacion de La Caja de Resistencia Camion 129 y 130Jose A. Basanta H.No ratings yet
- Dokumen - Tips - Planmed Sophie Part2 ServicemanualDocument37 pagesDokumen - Tips - Planmed Sophie Part2 ServicemanualMohammed BenzaidiNo ratings yet
- Rack Installation Guide-DA240Document8 pagesRack Installation Guide-DA240Fabricio RiverNo ratings yet
- Instrument Panel Systems: Removal and Installation Headlamp Leveling SwitchDocument2 pagesInstrument Panel Systems: Removal and Installation Headlamp Leveling SwitchCarlos Gabriel EstergaardNo ratings yet
- Roboitic Transfer All Actions of IntegraDocument19 pagesRoboitic Transfer All Actions of Integrapranshu126545No ratings yet
- Challenger 24012 IOMDocument19 pagesChallenger 24012 IOMgmsapiensNo ratings yet
- Minivator 1000 Series Installation Manual PDFDocument36 pagesMinivator 1000 Series Installation Manual PDFSergio PNo ratings yet
- Service Manual FOR Medical Diagnostic X-Ray Radiograph TableDocument6 pagesService Manual FOR Medical Diagnostic X-Ray Radiograph TableWael Fuad AL-MaktariNo ratings yet
- Rail Kit II Installation InstructionsDocument4 pagesRail Kit II Installation InstructionsSaurabhNo ratings yet
- 93ZJ Secc 8J Turn Signals and Hazard Warning FlashesDocument4 pages93ZJ Secc 8J Turn Signals and Hazard Warning Flasheshelgith74No ratings yet
- DrivetrainDocument43 pagesDrivetrainfuckoffalreadyNo ratings yet
- Sinowon Vertical Profile Projector Operation Manual enDocument16 pagesSinowon Vertical Profile Projector Operation Manual enJohnny DaiNo ratings yet
- F2O Feed Take UpAdjustmentDocument6 pagesF2O Feed Take UpAdjustmentdeniNo ratings yet
- Rotating Beam Fatigue Test MachineDocument13 pagesRotating Beam Fatigue Test MachineReNo ratings yet
- Rotary TablesDocument30 pagesRotary TablesCarlos MendozaNo ratings yet
- Cetac Z Drive AssemblyDocument13 pagesCetac Z Drive AssemblyYanine Aranda MosqueraNo ratings yet
- Wingspan ManualDocument9 pagesWingspan ManualalirioNo ratings yet
- E S S O S M: Lectric Lideout Ystem Peration AND Ervice AnualDocument21 pagesE S S O S M: Lectric Lideout Ystem Peration AND Ervice AnualJuan ContrerasNo ratings yet
- Alternator 130a.xmlDocument16 pagesAlternator 130a.xmlAnjaliNo ratings yet
- Training With HazloDocument17 pagesTraining With HazloChris ChromikNo ratings yet
- 06 E85 Chassis DynamicsDocument24 pages06 E85 Chassis DynamicsCristianNo ratings yet
- Isri Repair ManualDocument8 pagesIsri Repair ManualPaweł B100% (1)
- Djj10033 Chapter 3Document50 pagesDjj10033 Chapter 3YogenNo ratings yet
- BS 160 Selected PagesDocument52 pagesBS 160 Selected Pagesramesh suvvadaNo ratings yet
- Section 5 - Repair/Replacement Procedures: Part Number/ Nomenclature DescriptionDocument4 pagesSection 5 - Repair/Replacement Procedures: Part Number/ Nomenclature DescriptionGregorio1927No ratings yet
- 7chapter 9.1 Rotary TablesDocument26 pages7chapter 9.1 Rotary TablesRogerNo ratings yet
- How To Fine Tune Your 3D Printer ENDER 3Document87 pagesHow To Fine Tune Your 3D Printer ENDER 3Michaël Memeteau100% (5)
- User Instructions For R1100S Gear Switch IndicatorDocument17 pagesUser Instructions For R1100S Gear Switch Indicatorbuzzz57No ratings yet
- How to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheFrom EverandHow to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheRating: 4.5 out of 5 stars4.5/5 (2)
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- Gun Digest American Arms ATI GSG-5 Assembly/Disassembly InstructionsFrom EverandGun Digest American Arms ATI GSG-5 Assembly/Disassembly InstructionsNo ratings yet
- Legazpi Certificate of Non-Availability of Stocks: Product Code Product Description UOM PriceDocument6 pagesLegazpi Certificate of Non-Availability of Stocks: Product Code Product Description UOM PriceCharina Balunso-BasiloniaNo ratings yet
- Cardboard Geodesic DomeDocument5 pagesCardboard Geodesic DomeJuan BurgayaNo ratings yet
- PBM350Document110 pagesPBM350okz119No ratings yet
- Stanley BSL Catalogue 2013Document40 pagesStanley BSL Catalogue 2013Jonathan Alejandro Gutierrez CoronadoNo ratings yet
- The Institute of Chartered Accountants of IndiaDocument10 pagesThe Institute of Chartered Accountants of IndiaArun SNo ratings yet
- Pricing Office CatalogueDocument130 pagesPricing Office CatalogueSheikh GeeNo ratings yet
- Annual Implementation Plan: Masicampo - Es@deped - Gov.phDocument10 pagesAnnual Implementation Plan: Masicampo - Es@deped - Gov.phDonnalyn Tagpuno VilladoresNo ratings yet
- App PPMPDocument187 pagesApp PPMPNived Lrac Pdll SgnNo ratings yet
- Travel JournalDocument6 pagesTravel JournalLalaine JuanNo ratings yet
- Tyvek Installation Guide - Residential-WRB-Install PDFDocument24 pagesTyvek Installation Guide - Residential-WRB-Install PDFDavid TorskeNo ratings yet
- BaseLok GeoCell Installation GuideDocument4 pagesBaseLok GeoCell Installation GuideThameem SharaafNo ratings yet
- Gastrointestinal SurgDocument217 pagesGastrointestinal Surgagung permanaNo ratings yet
- User GuideDocument190 pagesUser GuideSaiful GhoziNo ratings yet
- Model 26-26D Manual-1008Document46 pagesModel 26-26D Manual-1008Anonymous 2MRGC0w1No ratings yet
- RS Alligator Staple Ab FastenersDocument4 pagesRS Alligator Staple Ab FastenersAdelia RachmanNo ratings yet
- RICOH Pro C5300s-C5310s Final Brochure v2 - HR - tcm100-39832Document12 pagesRICOH Pro C5300s-C5310s Final Brochure v2 - HR - tcm100-39832Pascu DanNo ratings yet
- A641 PDFDocument5 pagesA641 PDFandresNo ratings yet
- Ricoh Pro8100 Detailed DescriptionDocument514 pagesRicoh Pro8100 Detailed DescriptionMaria FedaltoNo ratings yet
- HARGADocument15 pagesHARGAgalihrahman51No ratings yet
- EB Electric Furnace Install InstructionsDocument20 pagesEB Electric Furnace Install InstructionsABHISHEK THAKURNo ratings yet
- Stores Items For Mv. Ceylon Princess DelivDocument98 pagesStores Items For Mv. Ceylon Princess DelivTharinSiriwardanaNo ratings yet
- Duplo System 2000Document2 pagesDuplo System 2000Георгий ПрокофьевNo ratings yet
- Module 2 Assignment: Hint - Double-Click So That Format Painter Remains Active. Member DiscountDocument10 pagesModule 2 Assignment: Hint - Double-Click So That Format Painter Remains Active. Member DiscountsnehaNo ratings yet
- Bostitch D62ADCDocument28 pagesBostitch D62ADCGus PeixotoNo ratings yet
- EPSON WF-C20590 Service Manual Page501-550Document50 pagesEPSON WF-C20590 Service Manual Page501-550ion ionNo ratings yet
- Catalogo Sistema Grapas Alligator para Aplicaciones Ligeras A PesadasDocument20 pagesCatalogo Sistema Grapas Alligator para Aplicaciones Ligeras A Pesadasluis carlos martin contrerasNo ratings yet
- POPR2 Oct 20222Document34 pagesPOPR2 Oct 20222MARJORIE LANORIONo ratings yet
- Ticket: CruiseDocument4 pagesTicket: CruisejuniorrachelNo ratings yet
- Paper Cone Wreath (12") : This Tutorial Provides Instructions For A 12" WreathDocument12 pagesPaper Cone Wreath (12") : This Tutorial Provides Instructions For A 12" WreathmariaNo ratings yet
- Scope of WorkDocument69 pagesScope of WorkRashad MallakNo ratings yet























































































Download as pdf or txt
You might also like
- Mesa Quirurgica Opt 70 Ec 02 PDFDocument36 pagesMesa Quirurgica Opt 70 Ec 02 PDFTEYLER BARBOZANo ratings yet
- Printbar RemovalDocument21 pagesPrintbar RemovalTaur1968100% (1)
- Kearney and Trecker Installation ManualDocument12 pagesKearney and Trecker Installation Manualaa987100% (1)
- Report On Four Bar Mechanism of Sewing MachineDocument8 pagesReport On Four Bar Mechanism of Sewing MachineshazedislamNo ratings yet
- RepymotDocument4 pagesRepymotEngin UzunNo ratings yet
- Qauntum FRU Y Trayrobot Scalar I40 I80 RevADocument26 pagesQauntum FRU Y Trayrobot Scalar I40 I80 RevAScramble 69No ratings yet
- Ex 4650Document16 pagesEx 4650Ulzii AltansukhNo ratings yet
- Inverter Mid Power Assembly ReplacementDocument13 pagesInverter Mid Power Assembly ReplacementRubén Cadima BarrientosNo ratings yet
- HP p3015 50.3 ErrorDocument4 pagesHP p3015 50.3 Errorwinner mediaNo ratings yet
- Surgical C-Arm Tables: Service ManualDocument80 pagesSurgical C-Arm Tables: Service ManualArt Messick100% (1)
- Aste-6z8l9t r0 enDocument3 pagesAste-6z8l9t r0 enfilip_kecNo ratings yet
- Exp 9 Introduction To MachinesDocument11 pagesExp 9 Introduction To MachinesMuhammad AwaisNo ratings yet
- Eaton CM-52 Remote Racking IL02400003EDocument16 pagesEaton CM-52 Remote Racking IL02400003EadvancedmotorNo ratings yet
- WheelHorse Electric Lift Accessory For Long Frame Tractors 8-4221Document4 pagesWheelHorse Electric Lift Accessory For Long Frame Tractors 8-4221Kevins Small Engine and Tractor ServiceNo ratings yet
- Planmed Sophie Part2 - ServicemanualDocument99 pagesPlanmed Sophie Part2 - ServicemanualOscar Orea100% (1)
- Manual de Servicio Inogen One - g3Document134 pagesManual de Servicio Inogen One - g3carlos andres hoyos perdomoNo ratings yet
- 7 Frame and WheelDocument12 pages7 Frame and Wheelalsief1951No ratings yet
- Chapter H - Parts Replacement & Repair Replacing Sensors & SwitchesDocument99 pagesChapter H - Parts Replacement & Repair Replacing Sensors & SwitchesolegNo ratings yet
- Maintenance Manual For BBS-V800 202109Document15 pagesMaintenance Manual For BBS-V800 202109thaungmtNo ratings yet
- Electrical Wireline Spooler User ManualDocument14 pagesElectrical Wireline Spooler User ManualJohn SimancaNo ratings yet
- B-3801 IOM - Rev - 2011-09-02 (1) MidlandDocument23 pagesB-3801 IOM - Rev - 2011-09-02 (1) MidlandLucas MonteNo ratings yet
- Xserve Raid Left or Right Light PipeDocument11 pagesXserve Raid Left or Right Light PipeRoberto BruniNo ratings yet
- Rack Installation Instructions: GuidelinesDocument16 pagesRack Installation Instructions: Guidelinesovidiu981No ratings yet
- Mini X Motor Replacement With Fan UpgradeDocument7 pagesMini X Motor Replacement With Fan UpgradeLucian ComanNo ratings yet
- UH-60A EH60A: RemovalDocument2 pagesUH-60A EH60A: RemovalaugustinhodjNo ratings yet
- RepheadDocument4 pagesRepheadEngin UzunNo ratings yet
- Quick Start Ex4600Document10 pagesQuick Start Ex4600Елена ШевчукNo ratings yet
- Balança 4182-A (Mecanica) - Revisão 02.08.2007 PDFDocument12 pagesBalança 4182-A (Mecanica) - Revisão 02.08.2007 PDFKadson AmaralNo ratings yet
- AA06058 Modificacion de La Caja de Resistencia Camion 129 y 130Document7 pagesAA06058 Modificacion de La Caja de Resistencia Camion 129 y 130Jose A. Basanta H.No ratings yet
- Dokumen - Tips - Planmed Sophie Part2 ServicemanualDocument37 pagesDokumen - Tips - Planmed Sophie Part2 ServicemanualMohammed BenzaidiNo ratings yet
- Rack Installation Guide-DA240Document8 pagesRack Installation Guide-DA240Fabricio RiverNo ratings yet
- Instrument Panel Systems: Removal and Installation Headlamp Leveling SwitchDocument2 pagesInstrument Panel Systems: Removal and Installation Headlamp Leveling SwitchCarlos Gabriel EstergaardNo ratings yet
- Roboitic Transfer All Actions of IntegraDocument19 pagesRoboitic Transfer All Actions of Integrapranshu126545No ratings yet
- Challenger 24012 IOMDocument19 pagesChallenger 24012 IOMgmsapiensNo ratings yet
- Minivator 1000 Series Installation Manual PDFDocument36 pagesMinivator 1000 Series Installation Manual PDFSergio PNo ratings yet
- Service Manual FOR Medical Diagnostic X-Ray Radiograph TableDocument6 pagesService Manual FOR Medical Diagnostic X-Ray Radiograph TableWael Fuad AL-MaktariNo ratings yet
- Rail Kit II Installation InstructionsDocument4 pagesRail Kit II Installation InstructionsSaurabhNo ratings yet
- 93ZJ Secc 8J Turn Signals and Hazard Warning FlashesDocument4 pages93ZJ Secc 8J Turn Signals and Hazard Warning Flasheshelgith74No ratings yet
- DrivetrainDocument43 pagesDrivetrainfuckoffalreadyNo ratings yet
- Sinowon Vertical Profile Projector Operation Manual enDocument16 pagesSinowon Vertical Profile Projector Operation Manual enJohnny DaiNo ratings yet
- F2O Feed Take UpAdjustmentDocument6 pagesF2O Feed Take UpAdjustmentdeniNo ratings yet
- Rotating Beam Fatigue Test MachineDocument13 pagesRotating Beam Fatigue Test MachineReNo ratings yet
- Rotary TablesDocument30 pagesRotary TablesCarlos MendozaNo ratings yet
- Cetac Z Drive AssemblyDocument13 pagesCetac Z Drive AssemblyYanine Aranda MosqueraNo ratings yet
- Wingspan ManualDocument9 pagesWingspan ManualalirioNo ratings yet
- E S S O S M: Lectric Lideout Ystem Peration AND Ervice AnualDocument21 pagesE S S O S M: Lectric Lideout Ystem Peration AND Ervice AnualJuan ContrerasNo ratings yet
- Alternator 130a.xmlDocument16 pagesAlternator 130a.xmlAnjaliNo ratings yet
- Training With HazloDocument17 pagesTraining With HazloChris ChromikNo ratings yet
- 06 E85 Chassis DynamicsDocument24 pages06 E85 Chassis DynamicsCristianNo ratings yet
- Isri Repair ManualDocument8 pagesIsri Repair ManualPaweł B100% (1)
- Djj10033 Chapter 3Document50 pagesDjj10033 Chapter 3YogenNo ratings yet
- BS 160 Selected PagesDocument52 pagesBS 160 Selected Pagesramesh suvvadaNo ratings yet
- Section 5 - Repair/Replacement Procedures: Part Number/ Nomenclature DescriptionDocument4 pagesSection 5 - Repair/Replacement Procedures: Part Number/ Nomenclature DescriptionGregorio1927No ratings yet
- 7chapter 9.1 Rotary TablesDocument26 pages7chapter 9.1 Rotary TablesRogerNo ratings yet
- How To Fine Tune Your 3D Printer ENDER 3Document87 pagesHow To Fine Tune Your 3D Printer ENDER 3Michaël Memeteau100% (5)
- User Instructions For R1100S Gear Switch IndicatorDocument17 pagesUser Instructions For R1100S Gear Switch Indicatorbuzzz57No ratings yet
- How to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheFrom EverandHow to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheRating: 4.5 out of 5 stars4.5/5 (2)
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- Gun Digest American Arms ATI GSG-5 Assembly/Disassembly InstructionsFrom EverandGun Digest American Arms ATI GSG-5 Assembly/Disassembly InstructionsNo ratings yet
- Legazpi Certificate of Non-Availability of Stocks: Product Code Product Description UOM PriceDocument6 pagesLegazpi Certificate of Non-Availability of Stocks: Product Code Product Description UOM PriceCharina Balunso-BasiloniaNo ratings yet
- Cardboard Geodesic DomeDocument5 pagesCardboard Geodesic DomeJuan BurgayaNo ratings yet
- PBM350Document110 pagesPBM350okz119No ratings yet
- Stanley BSL Catalogue 2013Document40 pagesStanley BSL Catalogue 2013Jonathan Alejandro Gutierrez CoronadoNo ratings yet
- The Institute of Chartered Accountants of IndiaDocument10 pagesThe Institute of Chartered Accountants of IndiaArun SNo ratings yet
- Pricing Office CatalogueDocument130 pagesPricing Office CatalogueSheikh GeeNo ratings yet
- Annual Implementation Plan: Masicampo - Es@deped - Gov.phDocument10 pagesAnnual Implementation Plan: Masicampo - Es@deped - Gov.phDonnalyn Tagpuno VilladoresNo ratings yet
- App PPMPDocument187 pagesApp PPMPNived Lrac Pdll SgnNo ratings yet
- Travel JournalDocument6 pagesTravel JournalLalaine JuanNo ratings yet
- Tyvek Installation Guide - Residential-WRB-Install PDFDocument24 pagesTyvek Installation Guide - Residential-WRB-Install PDFDavid TorskeNo ratings yet
- BaseLok GeoCell Installation GuideDocument4 pagesBaseLok GeoCell Installation GuideThameem SharaafNo ratings yet
- Gastrointestinal SurgDocument217 pagesGastrointestinal Surgagung permanaNo ratings yet
- User GuideDocument190 pagesUser GuideSaiful GhoziNo ratings yet
- Model 26-26D Manual-1008Document46 pagesModel 26-26D Manual-1008Anonymous 2MRGC0w1No ratings yet
- RS Alligator Staple Ab FastenersDocument4 pagesRS Alligator Staple Ab FastenersAdelia RachmanNo ratings yet
- RICOH Pro C5300s-C5310s Final Brochure v2 - HR - tcm100-39832Document12 pagesRICOH Pro C5300s-C5310s Final Brochure v2 - HR - tcm100-39832Pascu DanNo ratings yet
- A641 PDFDocument5 pagesA641 PDFandresNo ratings yet
- Ricoh Pro8100 Detailed DescriptionDocument514 pagesRicoh Pro8100 Detailed DescriptionMaria FedaltoNo ratings yet
- HARGADocument15 pagesHARGAgalihrahman51No ratings yet
- EB Electric Furnace Install InstructionsDocument20 pagesEB Electric Furnace Install InstructionsABHISHEK THAKURNo ratings yet
- Stores Items For Mv. Ceylon Princess DelivDocument98 pagesStores Items For Mv. Ceylon Princess DelivTharinSiriwardanaNo ratings yet
- Duplo System 2000Document2 pagesDuplo System 2000Георгий ПрокофьевNo ratings yet
- Module 2 Assignment: Hint - Double-Click So That Format Painter Remains Active. Member DiscountDocument10 pagesModule 2 Assignment: Hint - Double-Click So That Format Painter Remains Active. Member DiscountsnehaNo ratings yet
- Bostitch D62ADCDocument28 pagesBostitch D62ADCGus PeixotoNo ratings yet
- EPSON WF-C20590 Service Manual Page501-550Document50 pagesEPSON WF-C20590 Service Manual Page501-550ion ionNo ratings yet
- Catalogo Sistema Grapas Alligator para Aplicaciones Ligeras A PesadasDocument20 pagesCatalogo Sistema Grapas Alligator para Aplicaciones Ligeras A Pesadasluis carlos martin contrerasNo ratings yet
- POPR2 Oct 20222Document34 pagesPOPR2 Oct 20222MARJORIE LANORIONo ratings yet
- Ticket: CruiseDocument4 pagesTicket: CruisejuniorrachelNo ratings yet
- Paper Cone Wreath (12") : This Tutorial Provides Instructions For A 12" WreathDocument12 pagesPaper Cone Wreath (12") : This Tutorial Provides Instructions For A 12" WreathmariaNo ratings yet
- Scope of WorkDocument69 pagesScope of WorkRashad MallakNo ratings yet