Download as pdf or txt
You might also like
- Haha User Manual PDFDocument34 pagesHaha User Manual PDFDominicNo ratings yet
- Simulation - Thermal AssignmentDocument2 pagesSimulation - Thermal Assignmentsumardiono10No ratings yet
- I-Deas - Student Guide Cad Cam Cae enDocument466 pagesI-Deas - Student Guide Cad Cam Cae enJosé Johansson100% (1)
- Christopher MacLeod-An Introduction To Practical Neural Networks and Genetic Algorithms For Engineers and Scientists PDFDocument157 pagesChristopher MacLeod-An Introduction To Practical Neural Networks and Genetic Algorithms For Engineers and Scientists PDFAnaKarolinaMuniz100% (1)
- Autonomic Computing - Principles, Design and ImplementationDocument298 pagesAutonomic Computing - Principles, Design and ImplementationJack Naquib Echevarria Cisneros50% (2)
- OBJECT 187 QOP-82-03 (01) In-Process Inspections A 1Document4 pagesOBJECT 187 QOP-82-03 (01) In-Process Inspections A 1Andy RojasNo ratings yet
- Lab 1 - MyRIO Embedded DesignDocument8 pagesLab 1 - MyRIO Embedded DesignGhattas Akkad100% (1)
- Sliding Mode Control Tutorial PDFDocument7 pagesSliding Mode Control Tutorial PDFva3ttnNo ratings yet
- UL 1564 SUN Rev 8 25 2020 ED 8 25 2022Document3 pagesUL 1564 SUN Rev 8 25 2020 ED 8 25 2022Joshua JonesNo ratings yet
- Woldia University: A Non Ideal TransformerDocument24 pagesWoldia University: A Non Ideal TransformerKANDEGAMA H.R. (BET18077)No ratings yet
- ThesisDocument230 pagesThesisAbdelhalim Taieb BrahimNo ratings yet
- Introduction To Vision Systems in LabVIEWDocument27 pagesIntroduction To Vision Systems in LabVIEWvipula123No ratings yet
- Assignment 1Document2 pagesAssignment 1ramakrishnaprasad9080% (1)
- Brief 52202 57112 10820169518KNV.14000880 Part1 PDFDocument10 pagesBrief 52202 57112 10820169518KNV.14000880 Part1 PDFadarshNo ratings yet
- Group 2Document2 pagesGroup 2Zulqarnain KhanNo ratings yet
- Modeling and Simulation of Using Matlab/SimulinkDocument39 pagesModeling and Simulation of Using Matlab/Simulinksvp3761No ratings yet
- Ashok LeylandDocument8 pagesAshok LeylandNaveen KumarNo ratings yet
- Harman/Kardon HK-595 User's GuideDocument18 pagesHarman/Kardon HK-595 User's GuideWayne LundNo ratings yet
- Advanced Power ElectronicsDocument4 pagesAdvanced Power ElectronicsLinkan PriyadarsiniNo ratings yet
- Graphical User InterfaceDocument5 pagesGraphical User InterfaceKovács NikolettNo ratings yet
- Close Exam 1-ComDocument39 pagesClose Exam 1-ComJoel Morada BalanNo ratings yet
- Modeling and Simulation of Reluctance Motor Using Digital ComputerDocument5 pagesModeling and Simulation of Reluctance Motor Using Digital ComputerroyourboatNo ratings yet
- Datasheet: SF-CPV-205 High Efficiency Concentrator PV PanelDocument2 pagesDatasheet: SF-CPV-205 High Efficiency Concentrator PV PanelsaaskinsNo ratings yet
- PLCDocument5 pagesPLCkush ParmarNo ratings yet
- PMAC Whitepaper PDFDocument15 pagesPMAC Whitepaper PDFIFeLisTigrisNo ratings yet
- Autonomous Stair Climbing Robot Final Report: ArticleDocument74 pagesAutonomous Stair Climbing Robot Final Report: ArticleAbdullah Muhammad Sharifuzzaman SoykotNo ratings yet
- Home Assignment #6Document5 pagesHome Assignment #6Phạm Bùi Đình LộcNo ratings yet
- Maxon Formelsammlung - eDocument60 pagesMaxon Formelsammlung - eMega GamesNo ratings yet
- Intro2MatlabCh2 - Hadi Saadat PDFDocument12 pagesIntro2MatlabCh2 - Hadi Saadat PDF9290894No ratings yet
- Complex Variables: Question and AnswereDocument15 pagesComplex Variables: Question and AnswereveerendraNo ratings yet
- High Voltage PCDesignDocument36 pagesHigh Voltage PCDesignjagadees21No ratings yet
- Introduction To Robotics by Niku: Click Here To DownloadDocument3 pagesIntroduction To Robotics by Niku: Click Here To DownloadJAdekingNo ratings yet
- What Is A PLCDocument13 pagesWhat Is A PLCsushant_jhawer100% (1)
- Active Ethernet Micro Controller Users Manual v1Document220 pagesActive Ethernet Micro Controller Users Manual v1valuetechNo ratings yet
- Resistive Circuits: Chapter 3 in Dorf and SvobodaDocument47 pagesResistive Circuits: Chapter 3 in Dorf and Svobodaananzo3biNo ratings yet
- Pi Voltage Control Technique For 3 Phase Induuction Motor Using Simulink and ArduinoDocument37 pagesPi Voltage Control Technique For 3 Phase Induuction Motor Using Simulink and ArduinoPFANo ratings yet
- MATLAB Chapter 1: An Overview of MATLABDocument152 pagesMATLAB Chapter 1: An Overview of MATLABHusseinHazimeNo ratings yet
- Arduino Based Automatic Pneumatic SystemDocument31 pagesArduino Based Automatic Pneumatic Systemnklharish1No ratings yet
- Psimbook Exercises PreviewDocument28 pagesPsimbook Exercises PreviewLaura Garcia Mateo0% (1)
- Powering Electric Cars With DynamoDocument14 pagesPowering Electric Cars With DynamoBhaktiJadhavNo ratings yet
- Labview ExercisesDocument130 pagesLabview ExercisesMarcoags26No ratings yet
- Chapter 9 SensorsDocument48 pagesChapter 9 Sensorsامجد الغالبيNo ratings yet
- Creating An Altair Flux ProjectDocument33 pagesCreating An Altair Flux ProjectTusharNo ratings yet
- Dynamic Modelling of Differential-Drive Mobile RobotsDocument7 pagesDynamic Modelling of Differential-Drive Mobile RobotsMichael Mays100% (1)
- Smart Grids Section Course Outline-1Document3 pagesSmart Grids Section Course Outline-1Ab CNo ratings yet
- The Inventor MentorDocument271 pagesThe Inventor MentorΑρετή ΣταματούρουNo ratings yet
- Fundamentals of Lyapunov TheoryDocument9 pagesFundamentals of Lyapunov Theorygoitom01No ratings yet
- DC Machine SimulationDocument12 pagesDC Machine Simulationkiranch219No ratings yet
- Active Front End Topology Based Three Phase InverterDocument6 pagesActive Front End Topology Based Three Phase InverterPoornima SNo ratings yet
- Gopal Control Systems Principles and DesignDocument3 pagesGopal Control Systems Principles and DesignAngela0% (4)
- Development of A MATLAB & Simulink Model of A Single-Phase Grid-Connected Photovoltaic System PDFDocument8 pagesDevelopment of A MATLAB & Simulink Model of A Single-Phase Grid-Connected Photovoltaic System PDFAshwani GargNo ratings yet
- Proteus Tutorial - Light Emitting Diode (LED) and Bar Graph DisplayDocument7 pagesProteus Tutorial - Light Emitting Diode (LED) and Bar Graph DisplayGebBerheNo ratings yet
- LabVIEW Control Implementation TutorialDocument21 pagesLabVIEW Control Implementation TutorialDTNo ratings yet
- Flowcode Introductory Course PDFDocument12 pagesFlowcode Introductory Course PDFmawunyoNo ratings yet
- DC-DC Switching Boost ConverterDocument16 pagesDC-DC Switching Boost ConverterRaden Mas AgoenkNo ratings yet
- Solar Position Algorithm (SPA) : S7-1200 V4.x / TIAP V15.1 / TIAP Library & MATLAB ModelDocument19 pagesSolar Position Algorithm (SPA) : S7-1200 V4.x / TIAP V15.1 / TIAP Library & MATLAB ModelMauricio Parada ZuñigaNo ratings yet
- 05190505Document5 pages05190505deepak.stoicNo ratings yet
- Devices, Circuits, and Applications: Fourth EditionDocument34 pagesDevices, Circuits, and Applications: Fourth EditionAtiq Ur RehmanNo ratings yet
- Electrical Overstress (EOS): Devices, Circuits and SystemsFrom EverandElectrical Overstress (EOS): Devices, Circuits and SystemsNo ratings yet
- 07 UzDocument2 pages07 UzAum4Eng HelpNo ratings yet
- 001 205 Ea1026525 202209210923Document5 pages001 205 Ea1026525 202209210923Aum4Eng HelpNo ratings yet
- Safety Engineer: What Do They Do?Document1 pageSafety Engineer: What Do They Do?Aum4Eng HelpNo ratings yet
- Three-Phase Unbalanced System With PV SystemsDocument22 pagesThree-Phase Unbalanced System With PV SystemsAum4Eng HelpNo ratings yet
- Creation of Linear Time-Invariant Models (LTI-Models)Document52 pagesCreation of Linear Time-Invariant Models (LTI-Models)Aum4Eng HelpNo ratings yet
- Lecture 3 Modeling (Ii) - State Space ApproachDocument19 pagesLecture 3 Modeling (Ii) - State Space ApproachAum4Eng HelpNo ratings yet
- 6.241 Dynamic Systems and Control: Lecture 7: State-Space Models Readings: DDV, Chapters 7,8Document12 pages6.241 Dynamic Systems and Control: Lecture 7: State-Space Models Readings: DDV, Chapters 7,8Aum4Eng HelpNo ratings yet
- Lecture 6 State Space Modelling AnalysisDocument21 pagesLecture 6 State Space Modelling AnalysisAum4Eng HelpNo ratings yet
- 8.13 Compound Generator: F F Res F F Crit FDocument3 pages8.13 Compound Generator: F F Res F F Crit FAum4Eng HelpNo ratings yet
- Matlab Programming Help: Example 1Document8 pagesMatlab Programming Help: Example 1Aum4Eng HelpNo ratings yet
- Object-Oriented Analysis and Design With UML2 and Rational Software ModelerDocument26 pagesObject-Oriented Analysis and Design With UML2 and Rational Software Modelerpranesh_patelNo ratings yet
- Ip ProjectDocument50 pagesIp ProjectVanshikaNo ratings yet
- Effect of Optimal Uncoupling in Enhancing Synchronization StabilityDocument8 pagesEffect of Optimal Uncoupling in Enhancing Synchronization StabilityImran MohamedNo ratings yet
- Data Science ProjectsDocument3 pagesData Science ProjectsHanane GríssetteNo ratings yet
- 04 Discrete-Time Signal and SystemDocument57 pages04 Discrete-Time Signal and SystemYi JieNo ratings yet
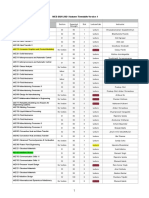
- MED 2020-2021 Autumn Timetable Version 1: CourseDocument3 pagesMED 2020-2021 Autumn Timetable Version 1: CourseSagar ChiraniaNo ratings yet
- Second Law of Thermodynamics Alternative StatementsDocument42 pagesSecond Law of Thermodynamics Alternative StatementsGabriel CisnerosNo ratings yet
- Ensembles NotesDocument5 pagesEnsembles NotesParamita HaldarNo ratings yet
- MLA Question BankDocument25 pagesMLA Question BankArun KumarNo ratings yet
- B - Lecture14 Stability in The Frequency Domain and Relative Stability Automatic Control SystemDocument16 pagesB - Lecture14 Stability in The Frequency Domain and Relative Stability Automatic Control SystemAbaziz Mousa OutlawZzNo ratings yet
- Temperature Control For Reheating Furnace WalkingDocument7 pagesTemperature Control For Reheating Furnace WalkingPrakash SarangiNo ratings yet
- Is A Publications SP 2016Document40 pagesIs A Publications SP 2016Anonymous NwnJNONo ratings yet
- Process Control by On-Line Trained Neural Controllers: Transactions 39, 6, 1992Document11 pagesProcess Control by On-Line Trained Neural Controllers: Transactions 39, 6, 1992Ganesh Kumar ArumugamNo ratings yet
- A Survey of Control Approaches For Unmanned Underwater Vehicles 19.8.2023 - Ver4.0Document15 pagesA Survey of Control Approaches For Unmanned Underwater Vehicles 19.8.2023 - Ver4.0Dr Agus BudiyonoNo ratings yet
- Jurmatis: Perancangan Penjadwalan Perawatan Mesin Bubut Dengan Metode SMK Negeri 1 KediriDocument11 pagesJurmatis: Perancangan Penjadwalan Perawatan Mesin Bubut Dengan Metode SMK Negeri 1 KediriAgung AdigunaNo ratings yet
- Quality Management PlanDocument27 pagesQuality Management Plantawfik100% (2)
- Process Management e Book PDFDocument25 pagesProcess Management e Book PDFmorozco1965No ratings yet
- ChapterDocument27 pagesChaptersuhayb_1988No ratings yet
- Ooad NotesDocument92 pagesOoad NotesSenthil IlangovanNo ratings yet
- Lean Manufacturing Quiz IIIDocument6 pagesLean Manufacturing Quiz IIITaiaa Lieuaa100% (1)
- Chapter 03 - Chaotic Synchronization, Conditional Lyapunov Exponents and Lyapunov's Direct MethodDocument30 pagesChapter 03 - Chaotic Synchronization, Conditional Lyapunov Exponents and Lyapunov's Direct Method王和盛No ratings yet
- System Analysis TasksDocument5 pagesSystem Analysis TasksZane Baumane100% (1)
- Industrial Automation - Lecture 1Document56 pagesIndustrial Automation - Lecture 1Elly TongsNo ratings yet
- t8 - Behavioural ModellingDocument56 pagest8 - Behavioural ModellingNazeyra JamalNo ratings yet
- Feedback and Control System: Signal Flow GraphsDocument59 pagesFeedback and Control System: Signal Flow GraphsBenj MendozaNo ratings yet
- Chapter 1 - Introduction (Compatibility Mode)Document33 pagesChapter 1 - Introduction (Compatibility Mode)Najmul Puda PappadamNo ratings yet
- Matlab Robust Control ToolboxDocument168 pagesMatlab Robust Control ToolboxkastoloNo ratings yet
- Thermodynamics MCQ PDFDocument9 pagesThermodynamics MCQ PDFNaveen RaiNo ratings yet