Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Removable Strap (4X) Manual Operated Damper: CustomerDocument1 pageRemovable Strap (4X) Manual Operated Damper: Customerprabhanshu241991No ratings yet
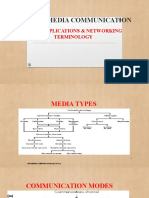
- Applications and Networking TerminolodgiesDocument24 pagesApplications and Networking TerminolodgieshimNo ratings yet
- ECE503: Digital Filter Design: D. Richard Brown IIIDocument33 pagesECE503: Digital Filter Design: D. Richard Brown IIIhimNo ratings yet
- Design and Implementation of Signal Processing Systems: An IntroductionDocument58 pagesDesign and Implementation of Signal Processing Systems: An IntroductionhimNo ratings yet
- Working Principle of Arc LampDocument8 pagesWorking Principle of Arc LamphimNo ratings yet
- Lab.6&7. IIR FiltersDocument8 pagesLab.6&7. IIR FiltershimNo ratings yet
- Multimedia ApplicationsDocument25 pagesMultimedia ApplicationshimNo ratings yet
- Multimedia Topic 1Document19 pagesMultimedia Topic 1himNo ratings yet
- Multimedia NetworksDocument19 pagesMultimedia NetworkshimNo ratings yet
- Introduction To Multimedia NetworksDocument36 pagesIntroduction To Multimedia NetworkshimNo ratings yet
- Data Communication & Networks G22.2262-001: AgendaDocument16 pagesData Communication & Networks G22.2262-001: AgendahimNo ratings yet
- Introduction of Multimedia CommunicationsDocument12 pagesIntroduction of Multimedia CommunicationshimNo ratings yet
- Illumination Notes NM PDFDocument17 pagesIllumination Notes NM PDFhimNo ratings yet
- 21 MultimediaDocument39 pages21 MultimediahimNo ratings yet
- CMOS Transceiver For Nano-Photonic Links in Data-Centers: Undergraduate Project Solomon Micheal SerunjogiDocument24 pagesCMOS Transceiver For Nano-Photonic Links in Data-Centers: Undergraduate Project Solomon Micheal SerunjogihimNo ratings yet
- Team BuildingDocument38 pagesTeam BuildinghimNo ratings yet
- Project Progress Report IndividualDocument6 pagesProject Progress Report IndividualhimNo ratings yet
- Refrigeration and Air Conditioning With Take Home TestDocument14 pagesRefrigeration and Air Conditioning With Take Home Testhim100% (1)
- Engineering ContractsDocument12 pagesEngineering ContractshimNo ratings yet
- BEEPPM Procurement FinalDocument22 pagesBEEPPM Procurement FinalhimNo ratings yet
- Project Ideas: Solomon Micheal SerunjogiDocument13 pagesProject Ideas: Solomon Micheal SerunjogihimNo ratings yet
- The Law of ContractDocument19 pagesThe Law of ContracthimNo ratings yet
- Project Cost Management and BudgetDocument28 pagesProject Cost Management and Budgethim100% (1)
- Lec 5 NormalizationDocument25 pagesLec 5 NormalizationhimNo ratings yet
- Lec 2 Database LifecycleDocument19 pagesLec 2 Database LifecyclehimNo ratings yet
- Lec 3 Relational ModelDocument21 pagesLec 3 Relational ModelhimNo ratings yet
- Database Development and Administration: TETE 4105Document40 pagesDatabase Development and Administration: TETE 4105himNo ratings yet
- Rms Energy FilterDocument5 pagesRms Energy FilterHimanshu SaxenaNo ratings yet
- 10 Band Eq DesignDocument3 pages10 Band Eq DesignAlex ArmNo ratings yet
- First and Second Order Filter Transfer FunctionsDocument59 pagesFirst and Second Order Filter Transfer FunctionsDeepthiNo ratings yet
- Active FiltersDocument13 pagesActive FiltersJulio Gabriel AseronNo ratings yet
- AutomobileDocument8 pagesAutomobileSourabh AgrawalNo ratings yet
- K Band Pass FilterDocument10 pagesK Band Pass Filterharshraj_88No ratings yet
- Lab 11 12 ECA HIGH AND LOW PASSDocument32 pagesLab 11 12 ECA HIGH AND LOW PASSAmna EjazNo ratings yet
- Kaeser FilterDocument7 pagesKaeser FilterMuhdi100% (2)
- DSP 21EC42 2ndIADocument1 pageDSP 21EC42 2ndIAKirana007No ratings yet
- Broom WadeDocument20 pagesBroom WadeRamon SanhuezaNo ratings yet
- Active High-Pass FiltersDocument10 pagesActive High-Pass Filtersموسى سعد لعيبيNo ratings yet
- Lab Guide DSP PDFDocument27 pagesLab Guide DSP PDFprakashranjit_736608No ratings yet
- ELEC4502 Microwave Circuits Project 1 - Design of An Mic Edge-Coupled Band-Pass FilterDocument8 pagesELEC4502 Microwave Circuits Project 1 - Design of An Mic Edge-Coupled Band-Pass FilterRabbia SalmanNo ratings yet
- Analysis and Simulation of Biquad Filters Using LTSPICEDocument22 pagesAnalysis and Simulation of Biquad Filters Using LTSPICE2K19/EE/259 TUSHARNo ratings yet
- Filter Integrity Test Certificate Purpose: To Determine The Integrity of Installed Hepa FiltersDocument2 pagesFilter Integrity Test Certificate Purpose: To Determine The Integrity of Installed Hepa FiltersbalajichandrakantNo ratings yet
- Finite Impulse Response (FIR) Digital FiltersDocument27 pagesFinite Impulse Response (FIR) Digital FiltersSRNo ratings yet
- Chittagong Institute of Engineering & Technology: Electrical & Electronic Engineering DepartmentDocument7 pagesChittagong Institute of Engineering & Technology: Electrical & Electronic Engineering DepartmentGolam Robbani RabbiNo ratings yet
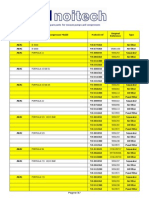
- NoitechDocument265 pagesNoitechbinhleduc36No ratings yet
- EENG6760 DSP LaboratoryDocument4 pagesEENG6760 DSP Laboratoryshoaibsaleem001No ratings yet
- FiltersDocument20 pagesFiltersljjbNo ratings yet
- PM Unit Komatsu, Caterpillar, Kobelco, Dan HitachiDocument3 pagesPM Unit Komatsu, Caterpillar, Kobelco, Dan HitachiEKO VUJINo ratings yet
- Module - 7 FiltrationDocument33 pagesModule - 7 FiltrationAli AbidNo ratings yet
- DSPP Comprehensice Question BankDocument14 pagesDSPP Comprehensice Question BankAbhishek PandeyNo ratings yet
- A "TRICK" For The Design of FIR Half-Band FiltersDocument4 pagesA "TRICK" For The Design of FIR Half-Band Filtersehsani_nickNo ratings yet
- Matlab Code PDFDocument8 pagesMatlab Code PDFTee Li MinNo ratings yet
- JMR A4 Mann Catalogue c01Document28 pagesJMR A4 Mann Catalogue c01Medo AtitoNo ratings yet
- 4 6filter BanksDocument9 pages4 6filter BanksAejaz AamerNo ratings yet
- Chap4 ActiveFilter (2012-IsMAIL)Document59 pagesChap4 ActiveFilter (2012-IsMAIL)Aya AmirNo ratings yet