
Parcial I Robotica
Parcial I Robotica
You might also like
- Lab 5 Submission - Programming PIC18 CountersDocument7 pagesLab 5 Submission - Programming PIC18 CountersShreyash Ankam100% (1)
- Homework 1 - Computer Architecture - HCMIUDocument3 pagesHomework 1 - Computer Architecture - HCMIUJoeNo ratings yet
- 3638 Exercice Verin FlowcodeDocument7 pages3638 Exercice Verin FlowcodeSaid AhnicheNo ratings yet
- Lecture # 13_newDocument50 pagesLecture # 13_newDanger DangerNo ratings yet
- Manual: Assembly & InstructionDocument52 pagesManual: Assembly & InstructionnxoxeNo ratings yet
- Digital Mirror1Document4 pagesDigital Mirror1anusinghaniyaNo ratings yet
- Downloads 132Document46 pagesDownloads 132chenamoni.sharath ChandraNo ratings yet
- Homework #6 (Optional HW) EE457: Due Date: May 2, 2016Document2 pagesHomework #6 (Optional HW) EE457: Due Date: May 2, 2016ottoporNo ratings yet
- 18uec173 - Experiment 2Document19 pages18uec173 - Experiment 2Divya SurekaNo ratings yet
- Tutorial 2 1Document2 pagesTutorial 2 1Collin lcwNo ratings yet
- VR14 14ME3603: Siddhartha Engineering CollegeDocument2 pagesVR14 14ME3603: Siddhartha Engineering CollegeVenkateshNo ratings yet
- CSEC Information Technology January 2018 P2Document21 pagesCSEC Information Technology January 2018 P2Tyrese SmithNo ratings yet
- Introduction To Retentive /Non-Retentive Latching and TimingDocument5 pagesIntroduction To Retentive /Non-Retentive Latching and TimingAhmad AdeeNo ratings yet
- MC OpenmpDocument10 pagesMC OpenmpBui Khoa Nguyen DangNo ratings yet
- ECL333 - Ktu QbankDocument7 pagesECL333 - Ktu QbankRoshith KNo ratings yet
- Question Bank: ७०८ सदाशिव पेठ, कुमठेकर मार्ग, पुणे ४११०३० संपकग क्रमांक (020) 2447 6938 E-mailDocument24 pagesQuestion Bank: ७०८ सदाशिव पेठ, कुमठेकर मार्ग, पुणे ४११०३० संपकग क्रमांक (020) 2447 6938 E-mailYadnesh PujareNo ratings yet
- Lab Manual # 06 Fourier Transform Objective:: College of Electrical & Mechanical Engineering, NUSTDocument2 pagesLab Manual # 06 Fourier Transform Objective:: College of Electrical & Mechanical Engineering, NUSTAhsanNo ratings yet
- TH TH: y (N) X (N) + N X (n+1)Document2 pagesTH TH: y (N) X (N) + N X (n+1)subhasis mohantyNo ratings yet
- Mid - Sem PapersDocument11 pagesMid - Sem PapersSanket MathurNo ratings yet
- EEM336 mt2 Example QuestionsDocument20 pagesEEM336 mt2 Example QuestionsMustafa TuraçNo ratings yet
- EE370 LabManualDocument50 pagesEE370 LabManualAnoop Mohan ChemnikarNo ratings yet
- Exercise 9Document3 pagesExercise 9陳冠言 CHEN,KUAN-YEN H54084010No ratings yet
- Lab1 1Document10 pagesLab1 1Bogdan LupeNo ratings yet
- EC6402 (4) EndDocument2 pagesEC6402 (4) EndSathiyaseelan SankarjeeNo ratings yet
- Analog Output Option: IQ Plus 355 Digital Weight IndicatorDocument6 pagesAnalog Output Option: IQ Plus 355 Digital Weight IndicatorJairo Gabriel Ramón RomeroNo ratings yet
- Index: Digital Signal ProcessingDocument66 pagesIndex: Digital Signal Processingsujitha405No ratings yet
- Lab 2Document7 pagesLab 2JHNo ratings yet
- Solved - Determine The Nodal Voltages As Labeled in Fig. 4.44, M...Document5 pagesSolved - Determine The Nodal Voltages As Labeled in Fig. 4.44, M...maria khanNo ratings yet
- Clase 12 (SEMANA 13) Calculo Numerico II - PGRA - 2024 - IDocument24 pagesClase 12 (SEMANA 13) Calculo Numerico II - PGRA - 2024 - ICARLOS RAUL ZARATE VELASQUEZNo ratings yet
- Arch June 2020Document3 pagesArch June 2020A7a WtfNo ratings yet
- Experiment 1: Pre-Lab Report: 1) Orcad SimulationDocument19 pagesExperiment 1: Pre-Lab Report: 1) Orcad SimulationasmaaNo ratings yet
- 29-04-2021-1619690516-6-Ijeee-3. Ijeee - Comparison of Phasor and Wavelet Analysis Based Fault Classification AlgorithmDocument12 pages29-04-2021-1619690516-6-Ijeee-3. Ijeee - Comparison of Phasor and Wavelet Analysis Based Fault Classification Algorithmiaset123No ratings yet
- Matlab Exercises Recitation 1 2.086 Spring 2012: FormatDocument4 pagesMatlab Exercises Recitation 1 2.086 Spring 2012: FormatkiranatfunNo ratings yet
- Signals & SystemsDocument19 pagesSignals & SystemsManish KushwahaNo ratings yet
- Nfa004 PDFDocument3 pagesNfa004 PDFAli HusseiniNo ratings yet
- Latio No Nly: Engineering OptimizationDocument2 pagesLatio No Nly: Engineering OptimizationGoutham KrishnaNo ratings yet
- PC Final Eng 2020 2021Document9 pagesPC Final Eng 2020 2021Mohamad AlwanNo ratings yet
- Chapter 4Document8 pagesChapter 4Ron Ron MarquezNo ratings yet
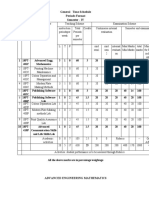
- General Time Schedule Periods Format Semester - IVDocument73 pagesGeneral Time Schedule Periods Format Semester - IVPrax techNo ratings yet
- ESD Mid Sem Exam 2019 - KeyDocument5 pagesESD Mid Sem Exam 2019 - Keyashish6789No ratings yet
- PDC 2022Document2 pagesPDC 2022Saif AliNo ratings yet
- Lecture 13 - Iteration and For-Loops - 2022Document45 pagesLecture 13 - Iteration and For-Loops - 2022Hải LêNo ratings yet
- Report PDFDocument20 pagesReport PDFHossamMohammedNo ratings yet
- Labmanualuohee370 121205093703 Phpapp01Document50 pagesLabmanualuohee370 121205093703 Phpapp01Dr-Eng Imad A. ShaheenNo ratings yet
- Problem #1 Due Date: 20 September 2017: No Instruction Type Clock/instruction Percent of Execution (%)Document2 pagesProblem #1 Due Date: 20 September 2017: No Instruction Type Clock/instruction Percent of Execution (%)Yelli YulfitaNo ratings yet
- C Programming 1Document134 pagesC Programming 1Phyo Mg Mg AungNo ratings yet
- CADocument8 pagesCARachit NarangNo ratings yet
- Presentacion TrialLectureDocument49 pagesPresentacion TrialLectureJose SifuentesNo ratings yet
- B.Tech II Year II Semester (R15) Regular Examinations May/June 2017Document2 pagesB.Tech II Year II Semester (R15) Regular Examinations May/June 2017sssssNo ratings yet
- Bee31101 Lab 6 6 Electronics Engineering Laboratory IV DC Motor Control SerDocument36 pagesBee31101 Lab 6 6 Electronics Engineering Laboratory IV DC Motor Control Serelxao9292100% (1)
- EE264 Final Project Report: Echai@stanford - EduDocument17 pagesEE264 Final Project Report: Echai@stanford - Edubasela2010No ratings yet
- Shape Function GeneratioDocument34 pagesShape Function Generatiodtr17No ratings yet
- Unit 5: Inflation and Exchange Rates: This Learning Unit Is Based On Chapter 8 of The Prescribed BookDocument3 pagesUnit 5: Inflation and Exchange Rates: This Learning Unit Is Based On Chapter 8 of The Prescribed BookCo-leigh CornerNo ratings yet
- Embedded Systems Engineering - EC3461Document5 pagesEmbedded Systems Engineering - EC3461Minecraft BuilderNo ratings yet
- CS2Qbank 12thfinalDocument23 pagesCS2Qbank 12thfinalSayali PandavNo ratings yet
- Final Exam Microprocessor Fundamentals 2020 Part 2Document7 pagesFinal Exam Microprocessor Fundamentals 2020 Part 2انجینئر بلاول شمیرNo ratings yet
- 05 Laboratory Exercise 1 - Procedural and Loop InstructionsDocument3 pages05 Laboratory Exercise 1 - Procedural and Loop InstructionsNice MoveNo ratings yet
- Let's Practise: Maths Workbook Coursebook 8From EverandLet's Practise: Maths Workbook Coursebook 8No ratings yet
- Let's Practise: Maths Workbook Coursebook 7From EverandLet's Practise: Maths Workbook Coursebook 7No ratings yet


























































Download as pdf or txt
You might also like
- Lab 5 Submission - Programming PIC18 CountersDocument7 pagesLab 5 Submission - Programming PIC18 CountersShreyash Ankam100% (1)
- Homework 1 - Computer Architecture - HCMIUDocument3 pagesHomework 1 - Computer Architecture - HCMIUJoeNo ratings yet
- 3638 Exercice Verin FlowcodeDocument7 pages3638 Exercice Verin FlowcodeSaid AhnicheNo ratings yet
- Lecture # 13_newDocument50 pagesLecture # 13_newDanger DangerNo ratings yet
- Manual: Assembly & InstructionDocument52 pagesManual: Assembly & InstructionnxoxeNo ratings yet
- Digital Mirror1Document4 pagesDigital Mirror1anusinghaniyaNo ratings yet
- Downloads 132Document46 pagesDownloads 132chenamoni.sharath ChandraNo ratings yet
- Homework #6 (Optional HW) EE457: Due Date: May 2, 2016Document2 pagesHomework #6 (Optional HW) EE457: Due Date: May 2, 2016ottoporNo ratings yet
- 18uec173 - Experiment 2Document19 pages18uec173 - Experiment 2Divya SurekaNo ratings yet
- Tutorial 2 1Document2 pagesTutorial 2 1Collin lcwNo ratings yet
- VR14 14ME3603: Siddhartha Engineering CollegeDocument2 pagesVR14 14ME3603: Siddhartha Engineering CollegeVenkateshNo ratings yet
- CSEC Information Technology January 2018 P2Document21 pagesCSEC Information Technology January 2018 P2Tyrese SmithNo ratings yet
- Introduction To Retentive /Non-Retentive Latching and TimingDocument5 pagesIntroduction To Retentive /Non-Retentive Latching and TimingAhmad AdeeNo ratings yet
- MC OpenmpDocument10 pagesMC OpenmpBui Khoa Nguyen DangNo ratings yet
- ECL333 - Ktu QbankDocument7 pagesECL333 - Ktu QbankRoshith KNo ratings yet
- Question Bank: ७०८ सदाशिव पेठ, कुमठेकर मार्ग, पुणे ४११०३० संपकग क्रमांक (020) 2447 6938 E-mailDocument24 pagesQuestion Bank: ७०८ सदाशिव पेठ, कुमठेकर मार्ग, पुणे ४११०३० संपकग क्रमांक (020) 2447 6938 E-mailYadnesh PujareNo ratings yet
- Lab Manual # 06 Fourier Transform Objective:: College of Electrical & Mechanical Engineering, NUSTDocument2 pagesLab Manual # 06 Fourier Transform Objective:: College of Electrical & Mechanical Engineering, NUSTAhsanNo ratings yet
- TH TH: y (N) X (N) + N X (n+1)Document2 pagesTH TH: y (N) X (N) + N X (n+1)subhasis mohantyNo ratings yet
- Mid - Sem PapersDocument11 pagesMid - Sem PapersSanket MathurNo ratings yet
- EEM336 mt2 Example QuestionsDocument20 pagesEEM336 mt2 Example QuestionsMustafa TuraçNo ratings yet
- EE370 LabManualDocument50 pagesEE370 LabManualAnoop Mohan ChemnikarNo ratings yet
- Exercise 9Document3 pagesExercise 9陳冠言 CHEN,KUAN-YEN H54084010No ratings yet
- Lab1 1Document10 pagesLab1 1Bogdan LupeNo ratings yet
- EC6402 (4) EndDocument2 pagesEC6402 (4) EndSathiyaseelan SankarjeeNo ratings yet
- Analog Output Option: IQ Plus 355 Digital Weight IndicatorDocument6 pagesAnalog Output Option: IQ Plus 355 Digital Weight IndicatorJairo Gabriel Ramón RomeroNo ratings yet
- Index: Digital Signal ProcessingDocument66 pagesIndex: Digital Signal Processingsujitha405No ratings yet
- Lab 2Document7 pagesLab 2JHNo ratings yet
- Solved - Determine The Nodal Voltages As Labeled in Fig. 4.44, M...Document5 pagesSolved - Determine The Nodal Voltages As Labeled in Fig. 4.44, M...maria khanNo ratings yet
- Clase 12 (SEMANA 13) Calculo Numerico II - PGRA - 2024 - IDocument24 pagesClase 12 (SEMANA 13) Calculo Numerico II - PGRA - 2024 - ICARLOS RAUL ZARATE VELASQUEZNo ratings yet
- Arch June 2020Document3 pagesArch June 2020A7a WtfNo ratings yet
- Experiment 1: Pre-Lab Report: 1) Orcad SimulationDocument19 pagesExperiment 1: Pre-Lab Report: 1) Orcad SimulationasmaaNo ratings yet
- 29-04-2021-1619690516-6-Ijeee-3. Ijeee - Comparison of Phasor and Wavelet Analysis Based Fault Classification AlgorithmDocument12 pages29-04-2021-1619690516-6-Ijeee-3. Ijeee - Comparison of Phasor and Wavelet Analysis Based Fault Classification Algorithmiaset123No ratings yet
- Matlab Exercises Recitation 1 2.086 Spring 2012: FormatDocument4 pagesMatlab Exercises Recitation 1 2.086 Spring 2012: FormatkiranatfunNo ratings yet
- Signals & SystemsDocument19 pagesSignals & SystemsManish KushwahaNo ratings yet
- Nfa004 PDFDocument3 pagesNfa004 PDFAli HusseiniNo ratings yet
- Latio No Nly: Engineering OptimizationDocument2 pagesLatio No Nly: Engineering OptimizationGoutham KrishnaNo ratings yet
- PC Final Eng 2020 2021Document9 pagesPC Final Eng 2020 2021Mohamad AlwanNo ratings yet
- Chapter 4Document8 pagesChapter 4Ron Ron MarquezNo ratings yet
- General Time Schedule Periods Format Semester - IVDocument73 pagesGeneral Time Schedule Periods Format Semester - IVPrax techNo ratings yet
- ESD Mid Sem Exam 2019 - KeyDocument5 pagesESD Mid Sem Exam 2019 - Keyashish6789No ratings yet
- PDC 2022Document2 pagesPDC 2022Saif AliNo ratings yet
- Lecture 13 - Iteration and For-Loops - 2022Document45 pagesLecture 13 - Iteration and For-Loops - 2022Hải LêNo ratings yet
- Report PDFDocument20 pagesReport PDFHossamMohammedNo ratings yet
- Labmanualuohee370 121205093703 Phpapp01Document50 pagesLabmanualuohee370 121205093703 Phpapp01Dr-Eng Imad A. ShaheenNo ratings yet
- Problem #1 Due Date: 20 September 2017: No Instruction Type Clock/instruction Percent of Execution (%)Document2 pagesProblem #1 Due Date: 20 September 2017: No Instruction Type Clock/instruction Percent of Execution (%)Yelli YulfitaNo ratings yet
- C Programming 1Document134 pagesC Programming 1Phyo Mg Mg AungNo ratings yet
- CADocument8 pagesCARachit NarangNo ratings yet
- Presentacion TrialLectureDocument49 pagesPresentacion TrialLectureJose SifuentesNo ratings yet
- B.Tech II Year II Semester (R15) Regular Examinations May/June 2017Document2 pagesB.Tech II Year II Semester (R15) Regular Examinations May/June 2017sssssNo ratings yet
- Bee31101 Lab 6 6 Electronics Engineering Laboratory IV DC Motor Control SerDocument36 pagesBee31101 Lab 6 6 Electronics Engineering Laboratory IV DC Motor Control Serelxao9292100% (1)
- EE264 Final Project Report: Echai@stanford - EduDocument17 pagesEE264 Final Project Report: Echai@stanford - Edubasela2010No ratings yet
- Shape Function GeneratioDocument34 pagesShape Function Generatiodtr17No ratings yet
- Unit 5: Inflation and Exchange Rates: This Learning Unit Is Based On Chapter 8 of The Prescribed BookDocument3 pagesUnit 5: Inflation and Exchange Rates: This Learning Unit Is Based On Chapter 8 of The Prescribed BookCo-leigh CornerNo ratings yet
- Embedded Systems Engineering - EC3461Document5 pagesEmbedded Systems Engineering - EC3461Minecraft BuilderNo ratings yet
- CS2Qbank 12thfinalDocument23 pagesCS2Qbank 12thfinalSayali PandavNo ratings yet
- Final Exam Microprocessor Fundamentals 2020 Part 2Document7 pagesFinal Exam Microprocessor Fundamentals 2020 Part 2انجینئر بلاول شمیرNo ratings yet
- 05 Laboratory Exercise 1 - Procedural and Loop InstructionsDocument3 pages05 Laboratory Exercise 1 - Procedural and Loop InstructionsNice MoveNo ratings yet
- Let's Practise: Maths Workbook Coursebook 8From EverandLet's Practise: Maths Workbook Coursebook 8No ratings yet
- Let's Practise: Maths Workbook Coursebook 7From EverandLet's Practise: Maths Workbook Coursebook 7No ratings yet