Download as pdf or txt
You might also like
- Layton Skyline Owners ManualDocument3 pagesLayton Skyline Owners ManualJeremy EllisNo ratings yet
- Modern Control Systems (MCS) : Lecture-2-3-4 Root LocusDocument28 pagesModern Control Systems (MCS) : Lecture-2-3-4 Root LocusMeer Zafarullah NoohaniNo ratings yet
- Dixie General StoreDocument6 pagesDixie General StoreJoneceNo ratings yet
- Linear Control Systems (EE-3052) : Lecture-12 Introduction To Root LocusDocument25 pagesLinear Control Systems (EE-3052) : Lecture-12 Introduction To Root Locususama asifNo ratings yet
- Control Systems (CS) : Lecture-9 Introduction To Root LocusDocument26 pagesControl Systems (CS) : Lecture-9 Introduction To Root Locusحسن علي جاسمNo ratings yet
- Control Systems (CS) : Lecture-8 Root LocusDocument88 pagesControl Systems (CS) : Lecture-8 Root LocusKiranKumarNo ratings yet
- Lecture 9-Root LocusDocument92 pagesLecture 9-Root LocusStieve NjorogeNo ratings yet
- Root LocusDocument43 pagesRoot LocusSanthosh SNo ratings yet
- Partb Root LocusDocument86 pagesPartb Root LocusVeena Divya KrishnappaNo ratings yet
- Root LocusDocument114 pagesRoot LocusSwapneel NaphadeNo ratings yet
- Lecture 2-3-4 Root LocusDocument91 pagesLecture 2-3-4 Root LocusKalyan TejaNo ratings yet
- Lecture 2-3-4 Root LocusDocument91 pagesLecture 2-3-4 Root LocusNouman MemonNo ratings yet
- Digital and Non-Linear Control: Root LocusDocument41 pagesDigital and Non-Linear Control: Root LocusJohn LionelNo ratings yet
- Lecture VIII - Root LocusDocument81 pagesLecture VIII - Root LocusArafatNo ratings yet
- Root Locus Method: by G Deenadayalan, Ap HitsDocument40 pagesRoot Locus Method: by G Deenadayalan, Ap HitsMr. G. Deenadayalan Assistant Professor I - MECHATRONICSNo ratings yet
- 2 Root Locus 2023Document48 pages2 Root Locus 2023AnkitNo ratings yet
- Chapter 6. Root Locus Analysis of Control SystemsDocument45 pagesChapter 6. Root Locus Analysis of Control Systemsayenew asmareNo ratings yet
- Regulation and Control: by Tewedage SileshiDocument88 pagesRegulation and Control: by Tewedage SileshiSiraye AbirhamNo ratings yet
- Root Locus PPTDocument71 pagesRoot Locus PPTDarshan A BhyrataeNo ratings yet
- CIE-305-Topic8 - Root LocusDocument38 pagesCIE-305-Topic8 - Root LocusSanjay KansalNo ratings yet
- Chapter 1-Root LocusDocument52 pagesChapter 1-Root Locusmuiz_jojoNo ratings yet
- 3.ROOT LOCUS Technique - Ruhizan Edit Oct2020Document42 pages3.ROOT LOCUS Technique - Ruhizan Edit Oct2020MOHD ENDRA SHAFIQNo ratings yet
- Clase Lugar Geometrico de Las Raices IDocument32 pagesClase Lugar Geometrico de Las Raices IJesus Tapia GallardoNo ratings yet
- LecttureIIRoot Locus Method 2Document57 pagesLecttureIIRoot Locus Method 2JmbernabeNo ratings yet
- Control System Analysis and Design by Root Locus Method: Sistem Kendali ELS3204 Week 7 Session 1Document49 pagesControl System Analysis and Design by Root Locus Method: Sistem Kendali ELS3204 Week 7 Session 1Junaidy VandeanganNo ratings yet
- Control - System - Chapter 5 - 8EDocument33 pagesControl - System - Chapter 5 - 8EE24089046林雯琪No ratings yet
- Chapter 5 - Root Locus - HO PDFDocument6 pagesChapter 5 - Root Locus - HO PDFReinaldy MaslimNo ratings yet
- Chapter 7 - Root Locus TechniquesDocument39 pagesChapter 7 - Root Locus TechniquesANDREW LEONG CHUN TATT STUDENTNo ratings yet
- Root Locus MethodDocument35 pagesRoot Locus MethodYasir DawoodNo ratings yet
- Examples of Root LocusDocument25 pagesExamples of Root LocusNaman DhimanNo ratings yet
- Stability Analysis: Unit-IiiDocument19 pagesStability Analysis: Unit-IiirocklinetoNo ratings yet
- MCH3008 Lecture Week 6Document312 pagesMCH3008 Lecture Week 6Çağla Sena UzunNo ratings yet
- Lecture 3 Examples of Root LocusDocument25 pagesLecture 3 Examples of Root LocusNaddaa MohamedNo ratings yet
- Root LocusDocument44 pagesRoot LocusDheer MehrotraNo ratings yet
- B - Lecture10 The Root Locus Rules Automatic Control SystemDocument31 pagesB - Lecture10 The Root Locus Rules Automatic Control SystemAbaziz Mousa OutlawZzNo ratings yet
- Chapter 6Document25 pagesChapter 6chalaNo ratings yet
- HW 5 SolDocument10 pagesHW 5 SolPedroNo ratings yet
- Topic#8 Root Locus TechniqueDocument31 pagesTopic#8 Root Locus TechniqueAhmed ShafeekNo ratings yet
- Best Chaptr 7Document74 pagesBest Chaptr 7Siraj MohammedNo ratings yet
- Root Locus Method 2Document33 pagesRoot Locus Method 2Patel DipenNo ratings yet
- Root Locus MethodDocument23 pagesRoot Locus MethodChanoxismNo ratings yet
- CS 3Document17 pagesCS 3Haftamu HilufNo ratings yet
- 5.2 Root-Locus TechniqueDocument3 pages5.2 Root-Locus Techniquevikash yadavNo ratings yet
- Root Locus RulesDocument3 pagesRoot Locus RulesCollins EhizojieNo ratings yet
- Today's Class: Root LocusDocument8 pagesToday's Class: Root LocusSarah JaNo ratings yet
- Ee481 p10 Root - LocusDocument37 pagesEe481 p10 Root - Locusminato4thNo ratings yet
- Frequency Response Method (Continue)Document37 pagesFrequency Response Method (Continue)Edo SunardyNo ratings yet
- Lecture 7 & 8 (Stability Analysis)Document35 pagesLecture 7 & 8 (Stability Analysis)muhammad hamzaNo ratings yet
- Module 3Document40 pagesModule 3AlphaBravoNo ratings yet
- LAB No. 10 Analysis of Linear Control System Using Root Loci TechniqueDocument7 pagesLAB No. 10 Analysis of Linear Control System Using Root Loci TechniqueSanjar BeyNo ratings yet
- Rootlocus PDFDocument18 pagesRootlocus PDFNarendra ChaurasiaNo ratings yet
- Stability Analysis For Control SystemsDocument36 pagesStability Analysis For Control SystemsSARTHAK BAPATNo ratings yet
- MOOC Assignment-3 Answers PDFDocument15 pagesMOOC Assignment-3 Answers PDFvamshiNo ratings yet
- VL2022230502064 Da02Document2 pagesVL2022230502064 Da02Asmit Anand Singh 21BEE0130No ratings yet
- Lec 6 Unit 3 Stability AnalysisDocument23 pagesLec 6 Unit 3 Stability Analysisharsh singhNo ratings yet
- B - Lecture11 Extension of The Root Locus Automatic Control SystemDocument15 pagesB - Lecture11 Extension of The Root Locus Automatic Control SystemAbaziz Mousa OutlawZz100% (1)
- Frequency Response and Bode PlotsDocument43 pagesFrequency Response and Bode Plotszulusiphosi9No ratings yet
- Lec 6 Unit 3 Stability AnalysisDocument23 pagesLec 6 Unit 3 Stability Analysisharsh singhNo ratings yet
- Systems and ControlDocument16 pagesSystems and ControlDerrick Maatla MoadiNo ratings yet
- Supersingular p-adic L-functions, Maass-Shimura Operators and Waldspurger Formulas: (AMS-212)From EverandSupersingular p-adic L-functions, Maass-Shimura Operators and Waldspurger Formulas: (AMS-212)No ratings yet
- Scattering Theory for Automorphic Functions. (AM-87), Volume 87From EverandScattering Theory for Automorphic Functions. (AM-87), Volume 87No ratings yet
- Fundamenal of Electric Circuit NoteDocument225 pagesFundamenal of Electric Circuit NoteNazmul islamNo ratings yet
- Sensorless Field Oriented SMCC Based Integral Sliding Mode For Solar PV Based Induction Motor Drive For Water PumpingDocument10 pagesSensorless Field Oriented SMCC Based Integral Sliding Mode For Solar PV Based Induction Motor Drive For Water PumpingNazmul islamNo ratings yet
- Electric Circuits Ch05 Revised by SJDocument21 pagesElectric Circuits Ch05 Revised by SJNazmul islamNo ratings yet
- Channels in Antenna ConfigurationDocument9 pagesChannels in Antenna ConfigurationNazmul islamNo ratings yet
- Chapter 3Document19 pagesChapter 3Nazmul islamNo ratings yet
- Markets and Government in A Modern Economy: Adam Smith, The Wealth of Nations (1776)Document21 pagesMarkets and Government in A Modern Economy: Adam Smith, The Wealth of Nations (1776)Nazmul islamNo ratings yet
- Procedure For How To Update The Client Master ListDocument5 pagesProcedure For How To Update The Client Master ListNazmul islamNo ratings yet
- A Self-Balanced Step-Up Multilevel Inverter Based On Switched-Capacitor StructureDocument10 pagesA Self-Balanced Step-Up Multilevel Inverter Based On Switched-Capacitor StructureNazmul islamNo ratings yet
- The Accounting Information System: Tools For Business Decision-MakingDocument24 pagesThe Accounting Information System: Tools For Business Decision-MakingNazmul islamNo ratings yet
- Idiom & PhrasesDocument7 pagesIdiom & PhrasesNazmul islamNo ratings yet
- Simulink Platform. The Circuit Equations Can Be Written As FollowsDocument3 pagesSimulink Platform. The Circuit Equations Can Be Written As FollowsNazmul islamNo ratings yet
- Lecture - On Frequency - Response - Analysis and Bode PlotDocument48 pagesLecture - On Frequency - Response - Analysis and Bode PlotNazmul islamNo ratings yet
- EEE 3153-Control System: Lecture On Steady State ErrorsDocument31 pagesEEE 3153-Control System: Lecture On Steady State ErrorsNazmul islamNo ratings yet
- A Square T-Type (ST-Type) Module For Asymmetrical Multilevel InvertersDocument9 pagesA Square T-Type (ST-Type) Module For Asymmetrical Multilevel InvertersNazmul islamNo ratings yet
- First Order SystemDocument5 pagesFirst Order SystemNazmul islamNo ratings yet
- About Voltage Total Harmonic Distortion For Single-And Three-Phase Multilevel InvertersDocument4 pagesAbout Voltage Total Harmonic Distortion For Single-And Three-Phase Multilevel InvertersNazmul islamNo ratings yet
- FM3 Module 3Document33 pagesFM3 Module 3Jay OntuaNo ratings yet
- Application Petition For Bail SampleDocument3 pagesApplication Petition For Bail SampleZed AbantasNo ratings yet
- Impact of Work Life Balance On Women Employees (1) PsDocument13 pagesImpact of Work Life Balance On Women Employees (1) PsPunnya SelvarajNo ratings yet
- 2021 AP Exam Administration Scoring Guidelines - AP English Literature and CompositionDocument13 pages2021 AP Exam Administration Scoring Guidelines - AP English Literature and CompositionNicole SchifflerNo ratings yet
- Checklist For Training Process AuditDocument5 pagesChecklist For Training Process AuditReshmi RajeshNo ratings yet
- DRUG NAME: Octreotide: Synonym (S) : Common Trade Name (S) : ClassificationDocument9 pagesDRUG NAME: Octreotide: Synonym (S) : Common Trade Name (S) : ClassificationChandanaSanjeeNo ratings yet
- Dip One GoroDocument8 pagesDip One GoroanakayamNo ratings yet
- Đề thi thử THPTQG 1Document5 pagesĐề thi thử THPTQG 1dnnnmmny9jNo ratings yet
- Anaerobic Digestors With Phibro's Antibiotic - 2Document2 pagesAnaerobic Digestors With Phibro's Antibiotic - 2Itezaz AhsanNo ratings yet
- Project Management For ConstructionDocument468 pagesProject Management For ConstructionchileNo ratings yet
- Bahasa Inggris Ganjil Kelas X ABCDocument12 pagesBahasa Inggris Ganjil Kelas X ABCNazwarNo ratings yet
- Coal Policy: Prevailing Prospecting / Mining Concessions ProceduresDocument13 pagesCoal Policy: Prevailing Prospecting / Mining Concessions ProceduresZubair KhanNo ratings yet
- Colleen M. Nutter v. Kansas State University, and Its Representatives, Lou Ann Smith, Judith E. Banks, 930 F.2d 34, 10th Cir. (1991)Document3 pagesColleen M. Nutter v. Kansas State University, and Its Representatives, Lou Ann Smith, Judith E. Banks, 930 F.2d 34, 10th Cir. (1991)Scribd Government DocsNo ratings yet
- Minutes of BOT Meeting - 11.22.2023 (JAZZ)Document24 pagesMinutes of BOT Meeting - 11.22.2023 (JAZZ)antolin.angelo.bcNo ratings yet
- MethyalAlcohal PDFDocument2 pagesMethyalAlcohal PDFvivekpattniNo ratings yet
- Ayurvedic Literature in Orissa - An Overview: Prem Kishore, M.M. Padhi, G.C. NandaDocument6 pagesAyurvedic Literature in Orissa - An Overview: Prem Kishore, M.M. Padhi, G.C. NandaAngel LucyNo ratings yet
- Reading in Philippines HistoryDocument7 pagesReading in Philippines Historyrafaelalmazar416No ratings yet
- NotingDocument160 pagesNotingdpkonnetNo ratings yet
- J Appl Environ Biol Sci 56S62-682015 PDFDocument8 pagesJ Appl Environ Biol Sci 56S62-682015 PDFSepti Lidya sariNo ratings yet
- Rcse9702 115 s1Document1 pageRcse9702 115 s1WayyuNo ratings yet
- Psaj Prep Xii - 202324Document5 pagesPsaj Prep Xii - 202324Anto NdesoNo ratings yet
- Hill, Therapist Techniques, Client Involvement, and The Therapeutic Relationship, (Hill, 2005)Document12 pagesHill, Therapist Techniques, Client Involvement, and The Therapeutic Relationship, (Hill, 2005)Osman CastroNo ratings yet
- Middle Ages in Asia MapDocument3 pagesMiddle Ages in Asia MapAarush IyengarNo ratings yet
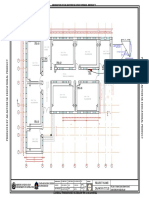
- Electrical of 6 Class Room .Dwg-POWDocument1 pageElectrical of 6 Class Room .Dwg-POWSayed WafiNo ratings yet
- Department of Education: Schools Division of Ozamiz CityDocument3 pagesDepartment of Education: Schools Division of Ozamiz CityDoone Heart Santander Cabuguas100% (1)
- Advisory Board By-LawsDocument3 pagesAdvisory Board By-LawsViola GilbertNo ratings yet
- DxdiagDocument35 pagesDxdiagCr DickyNo ratings yet
- Cambridge IGCSE: Information and Communication Technology 0417/03Document8 pagesCambridge IGCSE: Information and Communication Technology 0417/03EffNo ratings yet