Download as pdf or txt
You might also like
- Solutions Manual For Mechanics and ThermodynamicsDocument112 pagesSolutions Manual For Mechanics and ThermodynamicsPaduraru Giani83% (24)
- Evaluation of CBL, VDL, Usit, RFTDocument13 pagesEvaluation of CBL, VDL, Usit, RFTvvmanoj100% (4)
- Fluid Transients in Pipeline Systems (1st Edition) - ThorleyDocument264 pagesFluid Transients in Pipeline Systems (1st Edition) - ThorleyMamoon Riaz100% (9)
- PQR BranchesDocument23 pagesPQR BranchesKalpana Singh29% (7)
- Assignment Open and Closed Thermodynamic SystemDocument1 pageAssignment Open and Closed Thermodynamic SystemJenellie BahintingNo ratings yet
- MorpphingDocument16 pagesMorpphingsb aliNo ratings yet
- Acoustics: ACOUSTICS - C9 - 2015 1 Ş.L.DR - Ing.mat. Alina BogoiDocument31 pagesAcoustics: ACOUSTICS - C9 - 2015 1 Ş.L.DR - Ing.mat. Alina BogoiDenysadenisaNo ratings yet
- Solution of Homework #3Document6 pagesSolution of Homework #3丁偉庭No ratings yet
- ME300H Introduction To Finite Element MethodsDocument25 pagesME300H Introduction To Finite Element MethodsrockyminNo ratings yet
- Robotics 150722060709 Lva1 App6891Document26 pagesRobotics 150722060709 Lva1 App6891Samuel AdenijiNo ratings yet
- Chapter 1 Fundamentals of Turbulent JetDocument42 pagesChapter 1 Fundamentals of Turbulent JetMutlu ElmasNo ratings yet
- COMSOL Multiphysics Models For Teaching Chemical Engineering FundamentalsDocument20 pagesCOMSOL Multiphysics Models For Teaching Chemical Engineering FundamentalsHabli MawardiNo ratings yet
- DSJ BMS Unit3 16102020Document21 pagesDSJ BMS Unit3 16102020Parmeet KumarNo ratings yet
- PlateDocument13 pagesPlateRajendra PraharajNo ratings yet
- Angular ConventionsDocument15 pagesAngular ConventionsAlexgriNo ratings yet
- AbsorptionDocument41 pagesAbsorptionmahmoudNo ratings yet
- The Vibration Influence Above The Strains State of Linear Elastic Bar Type Cinematic Elements of The MechanismsDocument7 pagesThe Vibration Influence Above The Strains State of Linear Elastic Bar Type Cinematic Elements of The Mechanismsrmalciu311No ratings yet
- 002 Stiffness MethodDocument55 pages002 Stiffness MethodAatif RiazNo ratings yet
- Introduction To ROBOTICSDocument35 pagesIntroduction To ROBOTICSVistor VondarthNo ratings yet
- Robot Dynamics Lag EquationDocument33 pagesRobot Dynamics Lag EquationfluffkinNo ratings yet
- Giaonx,+5 TIThinh THQuocDocument13 pagesGiaonx,+5 TIThinh THQuocvsamir444No ratings yet
- Chapter01 Local ResonanceDocument5 pagesChapter01 Local Resonancej.shapleNo ratings yet
- Study of Vibrations in Visco-Poroelastic Cylinder Over A Initially Stressed Heterogeneous LayerDocument8 pagesStudy of Vibrations in Visco-Poroelastic Cylinder Over A Initially Stressed Heterogeneous LayerNanda KumarNo ratings yet
- Vibration Analysis and ModellingDocument3 pagesVibration Analysis and ModellingTom ReitsmaNo ratings yet
- ContentServer PDFDocument7 pagesContentServer PDFLUIS ISAAC LEON PARONo ratings yet
- Title: Instructions For UseDocument9 pagesTitle: Instructions For UseTrầmLãngNo ratings yet
- Hdout Chap 5 5210 PDFDocument87 pagesHdout Chap 5 5210 PDFJohn Joshua ProtacioNo ratings yet
- 142100008Document31 pages142100008Sumit PhadtareNo ratings yet
- 17718-Texto Do Trabalho-59487-1-10-20190425Document11 pages17718-Texto Do Trabalho-59487-1-10-20190425Angelo PereiraNo ratings yet
- Free Vibration Analysis of Rotating Beams With Random PropertiesDocument20 pagesFree Vibration Analysis of Rotating Beams With Random PropertiesZohreh KarimzadehNo ratings yet
- Character Tables: Procedure For DerivationDocument3 pagesCharacter Tables: Procedure For Derivationsmiling personNo ratings yet
- Final Lab 1Document3 pagesFinal Lab 1Justin DrawbertNo ratings yet
- Three-Dimensional Analysis of Anisotropic Elastic Plates: Yoshitaka SuetakeDocument9 pagesThree-Dimensional Analysis of Anisotropic Elastic Plates: Yoshitaka SuetakeHarsha HarNo ratings yet
- Nonlinear Dynamics Model of Transversal Cracked Rotor System and Its Matlab ImplementationDocument5 pagesNonlinear Dynamics Model of Transversal Cracked Rotor System and Its Matlab ImplementationNirmal KushwahaNo ratings yet
- FEEG1002 Formula Sheet S1 and S2 2015-16Document5 pagesFEEG1002 Formula Sheet S1 and S2 2015-16GeorgeNo ratings yet
- Finite Element Method (ME G512) Comprehensive Exam: Birla Institute of Technology & Science, Pilani - Hyderabad CampusDocument4 pagesFinite Element Method (ME G512) Comprehensive Exam: Birla Institute of Technology & Science, Pilani - Hyderabad Campustarun saddhahaqNo ratings yet
- Winter Ap Quiz One AnswersDocument3 pagesWinter Ap Quiz One AnswersteachopensourceNo ratings yet
- The Effect of The Type of Mounting On Stability of A Hydraulic Telescopic CylinderDocument8 pagesThe Effect of The Type of Mounting On Stability of A Hydraulic Telescopic CylinderAhmed NashaatNo ratings yet
- Chapter 2Document13 pagesChapter 2randompupil2008No ratings yet
- The Solution of Legendre Equation Use PoDocument12 pagesThe Solution of Legendre Equation Use PoErnesto RiveraNo ratings yet
- Actuators & Sensors Based On HBLS Smart HBLS Smart Materials MaterialsDocument22 pagesActuators & Sensors Based On HBLS Smart HBLS Smart Materials MaterialsSamNo ratings yet
- Digital Solution and Programming of Two-Dimensional Thermoelastic Dependent Problems For Transversal Isotropic BodiesDocument7 pagesDigital Solution and Programming of Two-Dimensional Thermoelastic Dependent Problems For Transversal Isotropic BodiesResearch ParkNo ratings yet
- Exam Vibrations and NoiseDocument6 pagesExam Vibrations and NoisejoaoftabreuNo ratings yet
- T1 Eng Math 4 2 20072008-Without Answer SchemeDocument2 pagesT1 Eng Math 4 2 20072008-Without Answer SchemeNursakmawani Abdul RafarNo ratings yet
- Analysis of Hollow-Core Slab Floors PDFDocument13 pagesAnalysis of Hollow-Core Slab Floors PDFFrancisco GoFlesNo ratings yet
- 2001 RING A 2D RIGID-BLOCK ANALYSIS PROGRAM FOR MASONRY ARCH BRIDGES - SurlignementDocument7 pages2001 RING A 2D RIGID-BLOCK ANALYSIS PROGRAM FOR MASONRY ARCH BRIDGES - SurlignementdhiaNo ratings yet
- Paper With Solution Physical Sciences PDFDocument32 pagesPaper With Solution Physical Sciences PDFRajesh MauryaNo ratings yet
- SINAPE GeneralDocument38 pagesSINAPE GeneralFernando WagnerNo ratings yet
- SRG Test PaperDocument20 pagesSRG Test Paperbprabha1971100% (1)
- BS 3Document58 pagesBS 3abhishekNo ratings yet
- CVG 4184 - 6305 - Ch5 - Strength and Deformation PDFDocument47 pagesCVG 4184 - 6305 - Ch5 - Strength and Deformation PDFStar998No ratings yet
- Regression Vs Kalman FilterDocument68 pagesRegression Vs Kalman FilterMinh HoangNo ratings yet
- Midterm 01Document3 pagesMidterm 01UnknownNo ratings yet
- 19-05-24 Isr - Iit Star Co-Sc (Model-A) Jee Adv 2023 (P-I) Wat-46 Key & SolDocument16 pages19-05-24 Isr - Iit Star Co-Sc (Model-A) Jee Adv 2023 (P-I) Wat-46 Key & SolkantaksathwikNo ratings yet
- Fiitjee All India Test Series: Concept Recapitulation Test - IvDocument14 pagesFiitjee All India Test Series: Concept Recapitulation Test - IvItsecret NameNo ratings yet
- Ion Beams for Materials AnalysisFrom EverandIon Beams for Materials AnalysisR. Curtis BirdNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Recent Topics in Nonlinear PDE IIFrom EverandRecent Topics in Nonlinear PDE IIK. MasudaNo ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiFrom EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiNo ratings yet
- Journal of Sound and Vibration 1997 - v200 83-103Document21 pagesJournal of Sound and Vibration 1997 - v200 83-103Franco VillanuevaNo ratings yet
- Journal of Sound and Vibration 1997 - v199 33-50Document18 pagesJournal of Sound and Vibration 1997 - v199 33-50Franco VillanuevaNo ratings yet
- Stability of A Jointed Free-Free Beam Under End Rocket ThrustDocument15 pagesStability of A Jointed Free-Free Beam Under End Rocket ThrustFranco VillanuevaNo ratings yet
- Stability and Vibration of Initially Stressed Plates Composed of Spatially Distributed Fiber CompositesDocument19 pagesStability and Vibration of Initially Stressed Plates Composed of Spatially Distributed Fiber CompositesFranco VillanuevaNo ratings yet
- Journal of Sound and Vibration 1997 - v200 31-40Document10 pagesJournal of Sound and Vibration 1997 - v200 31-40Franco VillanuevaNo ratings yet
- Journal of Sound and Vibration 1997 - v199 17-31Document15 pagesJournal of Sound and Vibration 1997 - v199 17-31Franco VillanuevaNo ratings yet
- Journal of Sound and Vibration 1997 - v200 15-29Document15 pagesJournal of Sound and Vibration 1997 - v200 15-29Franco VillanuevaNo ratings yet
- Out-Of-Plane Vibration of A Uniform Euler-Bernoulli Beam Attached To The Inside of A Rotating RimDocument19 pagesOut-Of-Plane Vibration of A Uniform Euler-Bernoulli Beam Attached To The Inside of A Rotating RimFranco VillanuevaNo ratings yet
- Applicability Conditions of A Non-Linear Superposition TechniqueDocument12 pagesApplicability Conditions of A Non-Linear Superposition TechniqueFranco VillanuevaNo ratings yet
- Musiccreationwith34tonesMarco Franco PDFDocument57 pagesMusiccreationwith34tonesMarco Franco PDFFranco VillanuevaNo ratings yet
- DR - No 1962Document1 pageDR - No 1962Franco VillanuevaNo ratings yet
- TR-1 Pag 11Document1 pageTR-1 Pag 11Franco VillanuevaNo ratings yet
- TR-1 Pag 12Document1 pageTR-1 Pag 12Franco VillanuevaNo ratings yet
- 2001: A Space Odyssey: - To RegisterDocument1 page2001: A Space Odyssey: - To RegisterFranco VillanuevaNo ratings yet
- TR-1 Pag 10Document1 pageTR-1 Pag 10Franco VillanuevaNo ratings yet
- Designing Home Theaters and Listening Rooms: Acoustical PerspectivesDocument24 pagesDesigning Home Theaters and Listening Rooms: Acoustical PerspectivesFranco VillanuevaNo ratings yet
- A Clockwork Orange 1971Document1 pageA Clockwork Orange 1971Franco VillanuevaNo ratings yet
- TR-1 Pag 07Document1 pageTR-1 Pag 07Franco VillanuevaNo ratings yet
- TR-1 Pag 04Document1 pageTR-1 Pag 04Franco VillanuevaNo ratings yet
- A Nightmare On Elm Street: - To RegisterDocument1 pageA Nightmare On Elm Street: - To RegisterFranco VillanuevaNo ratings yet
- From Dusk Till Dawn: - To RegisterDocument1 pageFrom Dusk Till Dawn: - To RegisterFranco VillanuevaNo ratings yet
- Planet of The Apes: - To RegisterDocument1 pagePlanet of The Apes: - To RegisterFranco VillanuevaNo ratings yet
- E.T. The Extra-Terrestrial: - To RegisterDocument1 pageE.T. The Extra-Terrestrial: - To RegisterFranco VillanuevaNo ratings yet
- L N A A: I A E: Ecture Otes in Udio Nalysis Ntroduction To Udio QualizersDocument8 pagesL N A A: I A E: Ecture Otes in Udio Nalysis Ntroduction To Udio QualizersFranco VillanuevaNo ratings yet
- TR-1 Pag 02Document1 pageTR-1 Pag 02Franco VillanuevaNo ratings yet
- Experiment NoDocument3 pagesExperiment Nopatrick KOUASSINo ratings yet
- V. R. Pendyala, V. S. Patwardhan (auth.), I. E. Smith (eds.) - Applications and Efficiency of Heat Pump Systems_ Proceedings of the 4th International Conference (Munich, Germany 1–3 October 1990)-Spri (1).pdfDocument188 pagesV. R. Pendyala, V. S. Patwardhan (auth.), I. E. Smith (eds.) - Applications and Efficiency of Heat Pump Systems_ Proceedings of the 4th International Conference (Munich, Germany 1–3 October 1990)-Spri (1).pdfFlorin-Alin BălașaNo ratings yet
- HumedadDocument49 pagesHumedadCarlos Jose Sibaja CardozoNo ratings yet
- Ch04 Stress, Strain and Shearing Analysis of SoilDocument64 pagesCh04 Stress, Strain and Shearing Analysis of SoilȜbd Elrhman Qandeel100% (1)
- Miniature-Scale Liquid-Fuel-Film CombustorDocument7 pagesMiniature-Scale Liquid-Fuel-Film Combustorherdi sutanto adigunaNo ratings yet
- l4 The Clausius-UpadiDocument8 pagesl4 The Clausius-UpadiMarcos Sánchez MartínezNo ratings yet
- Physics Test AnswersDocument3 pagesPhysics Test Answersbrendz murNo ratings yet
- 1 - Vertical Cylinder With Annular FinsDocument14 pages1 - Vertical Cylinder With Annular FinsMANISH SINGH IET Lucknow StudentNo ratings yet
- Coriolis Flow MeasurementDocument19 pagesCoriolis Flow MeasurementtetiospamNo ratings yet
- Design of ScaffoldingDocument9 pagesDesign of ScaffoldingdfdgggNo ratings yet
- ExjbhDocument4 pagesExjbhBryar Husen100% (1)
- TEnsion MembersDocument24 pagesTEnsion MembersJade CarilloNo ratings yet
- DNV GL-ST-F101 Combined Loading CriterionDocument8 pagesDNV GL-ST-F101 Combined Loading Criterionandixmen2021No ratings yet
- Capstone Chapter 4Document108 pagesCapstone Chapter 4Calvin BaraquiaNo ratings yet
- Simple Vapour Compression Refrigeration System: Advantages of Air RefrigerationDocument17 pagesSimple Vapour Compression Refrigeration System: Advantages of Air RefrigerationNikhil WaghalkarNo ratings yet
- Water: Performance Improvement of A Drag Hydrokinetic TurbineDocument23 pagesWater: Performance Improvement of A Drag Hydrokinetic TurbineXingxing HuangNo ratings yet
- ME 311-Fluid MechanicsDocument2 pagesME 311-Fluid Mechanicssaeed al-zahraniNo ratings yet
- Chapter 5 and 6 Springs Strain Energy 6 Per Page PDFDocument6 pagesChapter 5 and 6 Springs Strain Energy 6 Per Page PDFArshad AliNo ratings yet
- Nonlinear Cyclic Characteristics of Soils: February 2010Document11 pagesNonlinear Cyclic Characteristics of Soils: February 2010Benesta S.R.LNo ratings yet
- Valve SelectionDocument5 pagesValve SelectionmansurNo ratings yet
- Overall Heat Transfer CoefficientDocument12 pagesOverall Heat Transfer CoefficientHew LetNo ratings yet
- DJJ40153Document6 pagesDJJ40153SanNo ratings yet
- CHEM12 - C1805 - SRVS (Correct)Document2 pagesCHEM12 - C1805 - SRVS (Correct)xr aimNo ratings yet
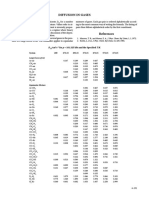
- Diffusion in Gases: /CM S For P 101.325 Kpa and The Specified T/KDocument2 pagesDiffusion in Gases: /CM S For P 101.325 Kpa and The Specified T/KRenan Rosa FerreiraNo ratings yet
- Ce 130Document2 pagesCe 130Mayito GarófaloNo ratings yet
- Hec14 - Hydraulic Engineering Circular 14 - "Energy Dissipators" PDFDocument287 pagesHec14 - Hydraulic Engineering Circular 14 - "Energy Dissipators" PDFrelu100% (1)