Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5824)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Semi Detailed Lesson Plan in Science 9Document7 pagesSemi Detailed Lesson Plan in Science 9Nianah Mae Dela Muega100% (4)
- 4 HorloverDocument418 pages4 HorloverCiel Phantomhive100% (2)
- Design of Reinforced Concrete StructuresDocument6 pagesDesign of Reinforced Concrete StructuresRavindra MRNo ratings yet
- Organizational Structure of PRDocument127 pagesOrganizational Structure of PRgopalmeb6368No ratings yet
- Smart Dustbin Report PaperDocument9 pagesSmart Dustbin Report PaperAbhishek JhaNo ratings yet
- Presentation Group Decision MakingDocument14 pagesPresentation Group Decision MakingRakesh Shrestha0% (1)
- Ophthalmics Brochure 1015 Lay2Document36 pagesOphthalmics Brochure 1015 Lay2nadjib62100% (2)
- Corken CompressorI100Document16 pagesCorken CompressorI100adriansya7No ratings yet
- Artificial Neural Network Using PythonDocument3 pagesArtificial Neural Network Using PythonPoornima GhodkeNo ratings yet
- JSA NEW FORM - Instalasi Radio Di Tower Office JO 37Document6 pagesJSA NEW FORM - Instalasi Radio Di Tower Office JO 37Muchamad SalafudinNo ratings yet
- Bushmaster B2K ManualDocument8 pagesBushmaster B2K Manualmjt00550% (2)
- Okonkwo Tragic Hero Thesis StatementDocument6 pagesOkonkwo Tragic Hero Thesis Statementkualxkiig100% (2)
- 3GPP - Carrier Aggregation For LTE - 20141015Document68 pages3GPP - Carrier Aggregation For LTE - 20141015Mochamad Guntur Hady PutraNo ratings yet
- Lon L. Fuller PDFDocument19 pagesLon L. Fuller PDFharshkumraNo ratings yet
- ISTA 6-AMAZON Packaging Test Solutions (PDFDrive)Document38 pagesISTA 6-AMAZON Packaging Test Solutions (PDFDrive)Ghenal RiveraNo ratings yet
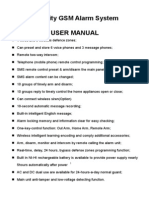
- GSM ALARMDocument17 pagesGSM ALARMDragan StanicNo ratings yet
- Exploring China's Tax Path Setting in The Context of Digital EconomyDocument11 pagesExploring China's Tax Path Setting in The Context of Digital EconomyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Software Agents: - Software Agents: - Software Agents Are A Piece - CharacteristicsDocument6 pagesSoftware Agents: - Software Agents: - Software Agents Are A Piece - CharacteristicsrkagrNo ratings yet
- EDAG0007Document5 pagesEDAG0007krunalNo ratings yet
- Sony CDP-C460Z Service ManualDocument34 pagesSony CDP-C460Z Service Manual王军No ratings yet
- Assessment and Evaluation of StudentsDocument8 pagesAssessment and Evaluation of StudentsMAXINE KEITH ROSARIONo ratings yet
- 1 71Document18 pages1 71CristianJoseTorresCassianiNo ratings yet
- BAS-3 T223 Session 1Document64 pagesBAS-3 T223 Session 1NguyenDa TrieuNo ratings yet
- The Psionic Generator Pattern Book by John P. BoyleDocument87 pagesThe Psionic Generator Pattern Book by John P. BoylemarcNo ratings yet
- Amanda Grace - Welcoming SequenceDocument7 pagesAmanda Grace - Welcoming SequenceAna Maria BuboleaNo ratings yet
- From Stupid To Solid CodeDocument50 pagesFrom Stupid To Solid CodeAndrei OlteanuNo ratings yet
- Odemil Nature's Number Book SynthesisDocument4 pagesOdemil Nature's Number Book SynthesisOdemil UyanNo ratings yet
- Module 6 - The Child and Adolescent Learners and Learning PrinciplesDocument29 pagesModule 6 - The Child and Adolescent Learners and Learning PrinciplesMarkhill Veran TiosanNo ratings yet
- OncquestDocument117 pagesOncquestShubhajeet DeyNo ratings yet
- Muet Speaking Past Year QuestionsDocument6 pagesMuet Speaking Past Year Questionsaina sorfina100% (1)