
Notes 02 - Producer Theory
Notes 02 - Producer Theory
You might also like
- Microeconomics Principles and Applications 6th Edition Hall Solutions ManualDocument17 pagesMicroeconomics Principles and Applications 6th Edition Hall Solutions ManualGeorgePalmerkqgd100% (41)
- Contract Types ComparisonDocument2 pagesContract Types Comparisonemerson.burlaNo ratings yet
- Why Economics Has Been Fruitful For StrategyDocument5 pagesWhy Economics Has Been Fruitful For Strategypritesh1983No ratings yet
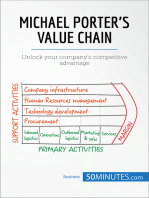
- Michael Porter's Value Chain: Unlock your company's competitive advantageFrom EverandMichael Porter's Value Chain: Unlock your company's competitive advantageRating: 4 out of 5 stars4/5 (1)
- Unilever Case StudyDocument21 pagesUnilever Case StudyMary Jennifer Odias100% (1)
- Consulting Interview Case Preparation: Frameworks and Practice CasesFrom EverandConsulting Interview Case Preparation: Frameworks and Practice CasesNo ratings yet
- Cambridge SummaryDocument1 pageCambridge SummaryMausam Ghosh100% (1)
- Business Feasibility Plan - ZZZDocument52 pagesBusiness Feasibility Plan - ZZZ诸葛一秀No ratings yet
- Indian Oil Corporation Business Analysys.Document2 pagesIndian Oil Corporation Business Analysys.pp779350% (2)
- The Vertical Boundaries of The Firm: Chapter ContentsDocument14 pagesThe Vertical Boundaries of The Firm: Chapter ContentsOscar CardenasNo ratings yet
- Business Economics: Q F (K, L, La)Document5 pagesBusiness Economics: Q F (K, L, La)Deep BhutaNo ratings yet
- EfficiencyDocument71 pagesEfficiencyhahahasanNo ratings yet
- Micro MacroDocument2 pagesMicro MacromanslikeNo ratings yet
- Competitive Advantage in Global Industries: Volume 23 Number 7/8 2000Document7 pagesCompetitive Advantage in Global Industries: Volume 23 Number 7/8 2000Ahmed FayekNo ratings yet
- Topic 4 and 5 Market Structures Pricing and Output DecisionsDocument8 pagesTopic 4 and 5 Market Structures Pricing and Output Decisionspatrickchiyangi6No ratings yet
- Study Guide For Module No. 7Document5 pagesStudy Guide For Module No. 7ambitchous19No ratings yet
- Innovation ManagementDocument8 pagesInnovation ManagementfeliciainaNo ratings yet
- Chapter 1Document21 pagesChapter 1Zerihun SisayNo ratings yet
- Engineering EconomicsDocument3 pagesEngineering EconomicsKroba sinjNo ratings yet
- Subject Segment Topic: Entrepreneurship Sources of Opportunity Competitive AnalysisDocument7 pagesSubject Segment Topic: Entrepreneurship Sources of Opportunity Competitive AnalysisBurhan Al MessiNo ratings yet
- Feiwel (Ed) Issues in Contemporary Microeconomics and Welfare (1985)Document28 pagesFeiwel (Ed) Issues in Contemporary Microeconomics and Welfare (1985)Mari Cielo QMNo ratings yet
- Chapter 4Document42 pagesChapter 4Qurat-ul-ain NasirNo ratings yet
- Principles of Microeconomics Unit 1: Introduction To EconomicsDocument5 pagesPrinciples of Microeconomics Unit 1: Introduction To EconomicsKeyah NkonghoNo ratings yet
- Evaluating Market Attractiveness: Individual Incentives vs. Industrial ProfitabilityDocument38 pagesEvaluating Market Attractiveness: Individual Incentives vs. Industrial ProfitabilityrerereNo ratings yet
- DSM - TheoryDocument22 pagesDSM - Theoryrupeshgoldar97No ratings yet
- Engineering Economics & Financial Accounting Two Mark Questions and AnswersDocument15 pagesEngineering Economics & Financial Accounting Two Mark Questions and AnswerspothigaiselvansNo ratings yet
- IO - Chapter I - Scope & Concepts - 2023-24Document34 pagesIO - Chapter I - Scope & Concepts - 2023-24valerachernov1098No ratings yet
- Strategic Management & Business Policy AssignmentDocument5 pagesStrategic Management & Business Policy Assignmentmann2015No ratings yet
- Chap 1 Introduction (IE)Document28 pagesChap 1 Introduction (IE)ZeNo ratings yet
- Solution Manual For Managerial Economics 6th Edition For KeatDocument11 pagesSolution Manual For Managerial Economics 6th Edition For KeatMariahAndersonjerfn100% (34)
- Stratagic PlanningDocument6 pagesStratagic Planningseeraju143No ratings yet
- Economic Assignment 1Document8 pagesEconomic Assignment 1John WaweruNo ratings yet
- Market Structure: E5 Managerial EconomicsDocument34 pagesMarket Structure: E5 Managerial EconomicsprabodhNo ratings yet
- ProfitTheory 1 PDFDocument7 pagesProfitTheory 1 PDFUtpal BaruaNo ratings yet
- Profit Motive Motivations of Managers and Workers Economies of Scale Risk Diversification Barriers To Growth of Firms 3noDocument3 pagesProfit Motive Motivations of Managers and Workers Economies of Scale Risk Diversification Barriers To Growth of Firms 3noArfath A JisHanNo ratings yet
- Chapter 6 Economics of OrganizationDocument9 pagesChapter 6 Economics of OrganizationJecil MondranoNo ratings yet
- Micro Economics II Monopolistic CompetitionDocument11 pagesMicro Economics II Monopolistic Competitiontegegn mogessieNo ratings yet
- Module 4 - : Welfare Economics and OrganizationDocument11 pagesModule 4 - : Welfare Economics and OrganizationMark LightNo ratings yet
- Group 2Document3 pagesGroup 2kkv_phani_varma5396No ratings yet
- REVIEWER ME (Finals)Document17 pagesREVIEWER ME (Finals)cynthia karylle natividadNo ratings yet
- DLG Are FinalDocument38 pagesDLG Are FinalAnonymous kqK4X9ZgGmNo ratings yet
- Industrial TwoDocument16 pagesIndustrial TwoSitra AbduNo ratings yet
- Module Econ FinalsDocument65 pagesModule Econ FinalsRie AerisNo ratings yet
- Indutri OrganizationDocument4 pagesIndutri OrganizationIconk RockNo ratings yet
- ch-2 NoteDocument29 pagesch-2 Notefhagoshag43No ratings yet
- Sanyal, Rajibkumar. (2019) - Profit Theory 1.Document7 pagesSanyal, Rajibkumar. (2019) - Profit Theory 1.m pNo ratings yet
- First Fundamental Theorem of Welfare EconomicsDocument9 pagesFirst Fundamental Theorem of Welfare EconomicsChander VeerNo ratings yet
- Theory, Strategy, and EntrepreneurshipDocument22 pagesTheory, Strategy, and EntrepreneurshipAlexander CameronNo ratings yet
- Chapter 1 & 2Document5 pagesChapter 1 & 2rog67558No ratings yet
- Value Innovation The Strategic Logic of High GrowthDocument11 pagesValue Innovation The Strategic Logic of High GrowthShoaib AkhtarNo ratings yet
- Module 5Document23 pagesModule 5Gandeti SantoshNo ratings yet
- 2 MarksDocument49 pages2 MarksPadmini SelvarajNo ratings yet
- Managerial Economics (8522) LEVEL: MBA (3 Years) Assignment No. 1Document26 pagesManagerial Economics (8522) LEVEL: MBA (3 Years) Assignment No. 1saniaNo ratings yet
- BIE 2nd Call - Exam SolutionsDocument8 pagesBIE 2nd Call - Exam SolutionsomerogolddNo ratings yet
- Microeconomics Principles and Applications 6th Edition Hall Solutions Manual instant download all chapterDocument34 pagesMicroeconomics Principles and Applications 6th Edition Hall Solutions Manual instant download all chapterkaricitayris100% (4)
- Instant Download PDF Microeconomics Principles and Applications 6th Edition Hall Solutions Manual Full ChapterDocument34 pagesInstant Download PDF Microeconomics Principles and Applications 6th Edition Hall Solutions Manual Full Chapterduginahwayda100% (8)
- MDI GDPI Prep - StrategyDocument10 pagesMDI GDPI Prep - StrategyDevavrat SinghNo ratings yet
- Perfect MarketDocument3 pagesPerfect MarketArooj FatimaNo ratings yet
- Managerial Economics As Defined By: Optimum Factor AllocationDocument26 pagesManagerial Economics As Defined By: Optimum Factor AllocationshelarmanojNo ratings yet
- Seccion V Nelson 1985Document55 pagesSeccion V Nelson 1985Diego Andrés Riaño PinzónNo ratings yet
- L1031 Microeconomics 2 EssayDocument8 pagesL1031 Microeconomics 2 Essayiqra khanNo ratings yet
- M.a.part - I - Industrial Economics - EngDocument228 pagesM.a.part - I - Industrial Economics - Engsamir2989No ratings yet
- A General Theory of Market Competition - M Theory: Chih-Hung Yeh and Tsung-Huai ChangDocument11 pagesA General Theory of Market Competition - M Theory: Chih-Hung Yeh and Tsung-Huai ChangqjebdkqeNo ratings yet
- How to Manage Future Costs and Risks Using Costing and MethodsFrom EverandHow to Manage Future Costs and Risks Using Costing and MethodsNo ratings yet
- Competition Concerns in Shipping ConferencesDocument125 pagesCompetition Concerns in Shipping ConferencesJeet ParikhNo ratings yet
- PnM3 1Document22 pagesPnM3 1Zoey LeNo ratings yet
- Chapter 10, 11, 12 Review Questions and AnswersDocument5 pagesChapter 10, 11, 12 Review Questions and Answersalaamabood6No ratings yet
- Nationalisation of Banks in IndiaDocument5 pagesNationalisation of Banks in IndiaPravish Lionel DcostaNo ratings yet
- Ch13 000Document44 pagesCh13 000cirujeffNo ratings yet
- SMA Notes All ChapterDocument218 pagesSMA Notes All ChapterTUYIZERE SamuelNo ratings yet
- The Ethics of Product ShrinkageDocument19 pagesThe Ethics of Product ShrinkageJohnny Mac LaurieNo ratings yet
- CH6 Retail PricingDocument36 pagesCH6 Retail PricingArafat hossainNo ratings yet
- Channel Selection Process and CriteriaDocument17 pagesChannel Selection Process and CriteriaAngita Kumari0% (1)
- Market Structures in Economics by Huzafa Tuition CentreDocument6 pagesMarket Structures in Economics by Huzafa Tuition CentreHuzafa Tuition CentreNo ratings yet
- Financial MarketDocument180 pagesFinancial MarketHa Vi TrinhNo ratings yet
- Inflation in NepalDocument19 pagesInflation in NepalSaroj KushwahaNo ratings yet
- Objectives and ConflictDocument39 pagesObjectives and Conflictsaly_888No ratings yet
- Cobmeco Finals Reviewer.1.2019-20Document3 pagesCobmeco Finals Reviewer.1.2019-20Jazehl Joy ValdezNo ratings yet
- Chapter 10 - Setting Product Strategy and Marketing Through The Life CycleDocument55 pagesChapter 10 - Setting Product Strategy and Marketing Through The Life CycleArman100% (2)
- Assignment 3: Course Title: ECO101Document4 pagesAssignment 3: Course Title: ECO101Rashik AhmedNo ratings yet
- App Holster LLCDocument7 pagesApp Holster LLCHAMMADHRNo ratings yet
- ZTC - SaifulDocument2 pagesZTC - SaifulSaiful RafiqNo ratings yet
- Year 12 BizDocument711 pagesYear 12 Bizchelsea nightingaleNo ratings yet
- Target Pricing With AnswersDocument16 pagesTarget Pricing With AnswersPoison Ivy100% (1)
- Reconcile Costing Based COPA With FIDocument12 pagesReconcile Costing Based COPA With FIkdamu100% (1)
- A Strategic Marketing Plan For NikeDocument23 pagesA Strategic Marketing Plan For NikeAj AquinoNo ratings yet
- ManzoorAli - 1829 - 16471 - 1 - Production - Scarcity-Choice-Opportunity Cost - and FirmsDocument17 pagesManzoorAli - 1829 - 16471 - 1 - Production - Scarcity-Choice-Opportunity Cost - and FirmsMuhammad AfzalNo ratings yet
- Competetion ActDocument50 pagesCompetetion Actapi-370533480% (5)























































































Download as pdf or txt
You might also like
- Microeconomics Principles and Applications 6th Edition Hall Solutions ManualDocument17 pagesMicroeconomics Principles and Applications 6th Edition Hall Solutions ManualGeorgePalmerkqgd100% (41)
- Contract Types ComparisonDocument2 pagesContract Types Comparisonemerson.burlaNo ratings yet
- Why Economics Has Been Fruitful For StrategyDocument5 pagesWhy Economics Has Been Fruitful For Strategypritesh1983No ratings yet
- Michael Porter's Value Chain: Unlock your company's competitive advantageFrom EverandMichael Porter's Value Chain: Unlock your company's competitive advantageRating: 4 out of 5 stars4/5 (1)
- Unilever Case StudyDocument21 pagesUnilever Case StudyMary Jennifer Odias100% (1)
- Consulting Interview Case Preparation: Frameworks and Practice CasesFrom EverandConsulting Interview Case Preparation: Frameworks and Practice CasesNo ratings yet
- Cambridge SummaryDocument1 pageCambridge SummaryMausam Ghosh100% (1)
- Business Feasibility Plan - ZZZDocument52 pagesBusiness Feasibility Plan - ZZZ诸葛一秀No ratings yet
- Indian Oil Corporation Business Analysys.Document2 pagesIndian Oil Corporation Business Analysys.pp779350% (2)
- The Vertical Boundaries of The Firm: Chapter ContentsDocument14 pagesThe Vertical Boundaries of The Firm: Chapter ContentsOscar CardenasNo ratings yet
- Business Economics: Q F (K, L, La)Document5 pagesBusiness Economics: Q F (K, L, La)Deep BhutaNo ratings yet
- EfficiencyDocument71 pagesEfficiencyhahahasanNo ratings yet
- Micro MacroDocument2 pagesMicro MacromanslikeNo ratings yet
- Competitive Advantage in Global Industries: Volume 23 Number 7/8 2000Document7 pagesCompetitive Advantage in Global Industries: Volume 23 Number 7/8 2000Ahmed FayekNo ratings yet
- Topic 4 and 5 Market Structures Pricing and Output DecisionsDocument8 pagesTopic 4 and 5 Market Structures Pricing and Output Decisionspatrickchiyangi6No ratings yet
- Study Guide For Module No. 7Document5 pagesStudy Guide For Module No. 7ambitchous19No ratings yet
- Innovation ManagementDocument8 pagesInnovation ManagementfeliciainaNo ratings yet
- Chapter 1Document21 pagesChapter 1Zerihun SisayNo ratings yet
- Engineering EconomicsDocument3 pagesEngineering EconomicsKroba sinjNo ratings yet
- Subject Segment Topic: Entrepreneurship Sources of Opportunity Competitive AnalysisDocument7 pagesSubject Segment Topic: Entrepreneurship Sources of Opportunity Competitive AnalysisBurhan Al MessiNo ratings yet
- Feiwel (Ed) Issues in Contemporary Microeconomics and Welfare (1985)Document28 pagesFeiwel (Ed) Issues in Contemporary Microeconomics and Welfare (1985)Mari Cielo QMNo ratings yet
- Chapter 4Document42 pagesChapter 4Qurat-ul-ain NasirNo ratings yet
- Principles of Microeconomics Unit 1: Introduction To EconomicsDocument5 pagesPrinciples of Microeconomics Unit 1: Introduction To EconomicsKeyah NkonghoNo ratings yet
- Evaluating Market Attractiveness: Individual Incentives vs. Industrial ProfitabilityDocument38 pagesEvaluating Market Attractiveness: Individual Incentives vs. Industrial ProfitabilityrerereNo ratings yet
- DSM - TheoryDocument22 pagesDSM - Theoryrupeshgoldar97No ratings yet
- Engineering Economics & Financial Accounting Two Mark Questions and AnswersDocument15 pagesEngineering Economics & Financial Accounting Two Mark Questions and AnswerspothigaiselvansNo ratings yet
- IO - Chapter I - Scope & Concepts - 2023-24Document34 pagesIO - Chapter I - Scope & Concepts - 2023-24valerachernov1098No ratings yet
- Strategic Management & Business Policy AssignmentDocument5 pagesStrategic Management & Business Policy Assignmentmann2015No ratings yet
- Chap 1 Introduction (IE)Document28 pagesChap 1 Introduction (IE)ZeNo ratings yet
- Solution Manual For Managerial Economics 6th Edition For KeatDocument11 pagesSolution Manual For Managerial Economics 6th Edition For KeatMariahAndersonjerfn100% (34)
- Stratagic PlanningDocument6 pagesStratagic Planningseeraju143No ratings yet
- Economic Assignment 1Document8 pagesEconomic Assignment 1John WaweruNo ratings yet
- Market Structure: E5 Managerial EconomicsDocument34 pagesMarket Structure: E5 Managerial EconomicsprabodhNo ratings yet
- ProfitTheory 1 PDFDocument7 pagesProfitTheory 1 PDFUtpal BaruaNo ratings yet
- Profit Motive Motivations of Managers and Workers Economies of Scale Risk Diversification Barriers To Growth of Firms 3noDocument3 pagesProfit Motive Motivations of Managers and Workers Economies of Scale Risk Diversification Barriers To Growth of Firms 3noArfath A JisHanNo ratings yet
- Chapter 6 Economics of OrganizationDocument9 pagesChapter 6 Economics of OrganizationJecil MondranoNo ratings yet
- Micro Economics II Monopolistic CompetitionDocument11 pagesMicro Economics II Monopolistic Competitiontegegn mogessieNo ratings yet
- Module 4 - : Welfare Economics and OrganizationDocument11 pagesModule 4 - : Welfare Economics and OrganizationMark LightNo ratings yet
- Group 2Document3 pagesGroup 2kkv_phani_varma5396No ratings yet
- REVIEWER ME (Finals)Document17 pagesREVIEWER ME (Finals)cynthia karylle natividadNo ratings yet
- DLG Are FinalDocument38 pagesDLG Are FinalAnonymous kqK4X9ZgGmNo ratings yet
- Industrial TwoDocument16 pagesIndustrial TwoSitra AbduNo ratings yet
- Module Econ FinalsDocument65 pagesModule Econ FinalsRie AerisNo ratings yet
- Indutri OrganizationDocument4 pagesIndutri OrganizationIconk RockNo ratings yet
- ch-2 NoteDocument29 pagesch-2 Notefhagoshag43No ratings yet
- Sanyal, Rajibkumar. (2019) - Profit Theory 1.Document7 pagesSanyal, Rajibkumar. (2019) - Profit Theory 1.m pNo ratings yet
- First Fundamental Theorem of Welfare EconomicsDocument9 pagesFirst Fundamental Theorem of Welfare EconomicsChander VeerNo ratings yet
- Theory, Strategy, and EntrepreneurshipDocument22 pagesTheory, Strategy, and EntrepreneurshipAlexander CameronNo ratings yet
- Chapter 1 & 2Document5 pagesChapter 1 & 2rog67558No ratings yet
- Value Innovation The Strategic Logic of High GrowthDocument11 pagesValue Innovation The Strategic Logic of High GrowthShoaib AkhtarNo ratings yet
- Module 5Document23 pagesModule 5Gandeti SantoshNo ratings yet
- 2 MarksDocument49 pages2 MarksPadmini SelvarajNo ratings yet
- Managerial Economics (8522) LEVEL: MBA (3 Years) Assignment No. 1Document26 pagesManagerial Economics (8522) LEVEL: MBA (3 Years) Assignment No. 1saniaNo ratings yet
- BIE 2nd Call - Exam SolutionsDocument8 pagesBIE 2nd Call - Exam SolutionsomerogolddNo ratings yet
- Microeconomics Principles and Applications 6th Edition Hall Solutions Manual instant download all chapterDocument34 pagesMicroeconomics Principles and Applications 6th Edition Hall Solutions Manual instant download all chapterkaricitayris100% (4)
- Instant Download PDF Microeconomics Principles and Applications 6th Edition Hall Solutions Manual Full ChapterDocument34 pagesInstant Download PDF Microeconomics Principles and Applications 6th Edition Hall Solutions Manual Full Chapterduginahwayda100% (8)
- MDI GDPI Prep - StrategyDocument10 pagesMDI GDPI Prep - StrategyDevavrat SinghNo ratings yet
- Perfect MarketDocument3 pagesPerfect MarketArooj FatimaNo ratings yet
- Managerial Economics As Defined By: Optimum Factor AllocationDocument26 pagesManagerial Economics As Defined By: Optimum Factor AllocationshelarmanojNo ratings yet
- Seccion V Nelson 1985Document55 pagesSeccion V Nelson 1985Diego Andrés Riaño PinzónNo ratings yet
- L1031 Microeconomics 2 EssayDocument8 pagesL1031 Microeconomics 2 Essayiqra khanNo ratings yet
- M.a.part - I - Industrial Economics - EngDocument228 pagesM.a.part - I - Industrial Economics - Engsamir2989No ratings yet
- A General Theory of Market Competition - M Theory: Chih-Hung Yeh and Tsung-Huai ChangDocument11 pagesA General Theory of Market Competition - M Theory: Chih-Hung Yeh and Tsung-Huai ChangqjebdkqeNo ratings yet
- How to Manage Future Costs and Risks Using Costing and MethodsFrom EverandHow to Manage Future Costs and Risks Using Costing and MethodsNo ratings yet
- Competition Concerns in Shipping ConferencesDocument125 pagesCompetition Concerns in Shipping ConferencesJeet ParikhNo ratings yet
- PnM3 1Document22 pagesPnM3 1Zoey LeNo ratings yet
- Chapter 10, 11, 12 Review Questions and AnswersDocument5 pagesChapter 10, 11, 12 Review Questions and Answersalaamabood6No ratings yet
- Nationalisation of Banks in IndiaDocument5 pagesNationalisation of Banks in IndiaPravish Lionel DcostaNo ratings yet
- Ch13 000Document44 pagesCh13 000cirujeffNo ratings yet
- SMA Notes All ChapterDocument218 pagesSMA Notes All ChapterTUYIZERE SamuelNo ratings yet
- The Ethics of Product ShrinkageDocument19 pagesThe Ethics of Product ShrinkageJohnny Mac LaurieNo ratings yet
- CH6 Retail PricingDocument36 pagesCH6 Retail PricingArafat hossainNo ratings yet
- Channel Selection Process and CriteriaDocument17 pagesChannel Selection Process and CriteriaAngita Kumari0% (1)
- Market Structures in Economics by Huzafa Tuition CentreDocument6 pagesMarket Structures in Economics by Huzafa Tuition CentreHuzafa Tuition CentreNo ratings yet
- Financial MarketDocument180 pagesFinancial MarketHa Vi TrinhNo ratings yet
- Inflation in NepalDocument19 pagesInflation in NepalSaroj KushwahaNo ratings yet
- Objectives and ConflictDocument39 pagesObjectives and Conflictsaly_888No ratings yet
- Cobmeco Finals Reviewer.1.2019-20Document3 pagesCobmeco Finals Reviewer.1.2019-20Jazehl Joy ValdezNo ratings yet
- Chapter 10 - Setting Product Strategy and Marketing Through The Life CycleDocument55 pagesChapter 10 - Setting Product Strategy and Marketing Through The Life CycleArman100% (2)
- Assignment 3: Course Title: ECO101Document4 pagesAssignment 3: Course Title: ECO101Rashik AhmedNo ratings yet
- App Holster LLCDocument7 pagesApp Holster LLCHAMMADHRNo ratings yet
- ZTC - SaifulDocument2 pagesZTC - SaifulSaiful RafiqNo ratings yet
- Year 12 BizDocument711 pagesYear 12 Bizchelsea nightingaleNo ratings yet
- Target Pricing With AnswersDocument16 pagesTarget Pricing With AnswersPoison Ivy100% (1)
- Reconcile Costing Based COPA With FIDocument12 pagesReconcile Costing Based COPA With FIkdamu100% (1)
- A Strategic Marketing Plan For NikeDocument23 pagesA Strategic Marketing Plan For NikeAj AquinoNo ratings yet
- ManzoorAli - 1829 - 16471 - 1 - Production - Scarcity-Choice-Opportunity Cost - and FirmsDocument17 pagesManzoorAli - 1829 - 16471 - 1 - Production - Scarcity-Choice-Opportunity Cost - and FirmsMuhammad AfzalNo ratings yet
- Competetion ActDocument50 pagesCompetetion Actapi-370533480% (5)