Download as pdf or txt
You might also like
- Hino Genuine Parts Catalogue q2Document12 pagesHino Genuine Parts Catalogue q2Tri Kinarto100% (1)
- Research Article: Survey of Mechatronic Techniques in Modern Machine DesignDocument10 pagesResearch Article: Survey of Mechatronic Techniques in Modern Machine DesignMahesh KanojiyaNo ratings yet
- Building Fast Accurate Powertrain Models For System Control DevelopmentDocument43 pagesBuilding Fast Accurate Powertrain Models For System Control Developmentdudde niranjanNo ratings yet
- Embedded Automotive System Development ProcessDocument2 pagesEmbedded Automotive System Development ProcessLuong Ngoc MinhNo ratings yet
- Abhi Roy - Using Model Based Design For Designing An Electric Powertrain With HIL PDFDocument99 pagesAbhi Roy - Using Model Based Design For Designing An Electric Powertrain With HIL PDFvarun sharmaNo ratings yet
- Virtual Commissioning WhitepaperDocument9 pagesVirtual Commissioning Whitepaperparthadas48100% (1)
- Modelingwith Sys MLTutorialDocument148 pagesModelingwith Sys MLTutorialradup2100% (1)
- MRAC Based PI Controller For Speed Control of D.C. Motor Using Lab ViewDocument6 pagesMRAC Based PI Controller For Speed Control of D.C. Motor Using Lab ViewlaidNo ratings yet
- FYP2 LastVersionpptxDocument33 pagesFYP2 LastVersionpptxYaseen AlrawahiNo ratings yet
- Siemens SW Accelerating Electrical Systems Design and Analysis With VeSys White PaperDocument12 pagesSiemens SW Accelerating Electrical Systems Design and Analysis With VeSys White Paperarun.nagarkarNo ratings yet
- Control Systems Design, Tuning and Optimization With Matlab and SimulinkDocument19 pagesControl Systems Design, Tuning and Optimization With Matlab and Simulinkjames83angNo ratings yet
- VITGuestLecture 16sep2017 StudentsDocument27 pagesVITGuestLecture 16sep2017 StudentsBalajee AsokanNo ratings yet
- Simulation - Multiphysics SimulationDocument9 pagesSimulation - Multiphysics SimulationMariana DarioNo ratings yet
- Vertical Integration of Simulation Environments & Automated Test Suite For Validation of JLR Adas FeaturesDocument25 pagesVertical Integration of Simulation Environments & Automated Test Suite For Validation of JLR Adas FeaturesTinku kutyNo ratings yet
- HIL Simulation To Test Mechatronic Component in Automotive Engineering PDFDocument16 pagesHIL Simulation To Test Mechatronic Component in Automotive Engineering PDFpurrab divakarNo ratings yet
- To Perform SIL and PIL Testing On Fast D PDFDocument4 pagesTo Perform SIL and PIL Testing On Fast D PDFgil lerNo ratings yet
- WP 01190 Real Time SocsDocument22 pagesWP 01190 Real Time SocsHugo MarcondesNo ratings yet
- DownloadDocument11 pagesDownloadMehrshad GhasemabadiNo ratings yet
- MXT Unit 3Document38 pagesMXT Unit 3ojas.s.dixitNo ratings yet
- SWE 205 - Introduction To Software EngineeringDocument20 pagesSWE 205 - Introduction To Software EngineeringDemon VenomNo ratings yet
- N116 DocumentationDocument100 pagesN116 DocumentationAshish LokhandeNo ratings yet
- N410 Documentation 2Document63 pagesN410 Documentation 2brunettemasheleNo ratings yet
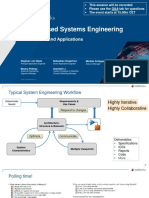
- MBSE - Practical Use and ApplicationsDocument37 pagesMBSE - Practical Use and ApplicationsSatana UccisoreNo ratings yet
- Hardware-In-The-Loop Testing of Electronically-Controlled Common-Rail Systems For Marine Diesel EngineDocument4 pagesHardware-In-The-Loop Testing of Electronically-Controlled Common-Rail Systems For Marine Diesel EnginePhyo ThihabookNo ratings yet
- Steer by Wire System Development Using ADocument8 pagesSteer by Wire System Development Using AMikyNo ratings yet
- White Paper Modular Engineering in Controlpanelbuilding enDocument11 pagesWhite Paper Modular Engineering in Controlpanelbuilding enDejanStarčevićNo ratings yet
- Adv of Digital Over AnalogDocument4 pagesAdv of Digital Over AnalogShobhaNo ratings yet
- Novedades de Las Últimas Versiones de Matlab y SimulinkDocument27 pagesNovedades de Las Últimas Versiones de Matlab y SimulinkPablo Martínez FilgueiraNo ratings yet
- Biswas 2017Document4 pagesBiswas 2017Kiên BùiNo ratings yet
- Parameters Identification of Induction Motor Using Bacterial Foraging AlgorithmDocument11 pagesParameters Identification of Induction Motor Using Bacterial Foraging AlgorithmIJEACS UKNo ratings yet
- MBD Motor ControlDocument4 pagesMBD Motor ControlMohammed Abd El Djalil DJEHAFNo ratings yet
- Model-Based Design For Embedded Control Systems: White PaperDocument12 pagesModel-Based Design For Embedded Control Systems: White Papersam hamNo ratings yet
- Model-Based Design: Design With Simulation in Simulink: Ruth-Anne Marchant Application Engineer MathworksDocument34 pagesModel-Based Design: Design With Simulation in Simulink: Ruth-Anne Marchant Application Engineer MathworksnounouNo ratings yet
- 2.REQUIREMENTS Eee403Document93 pages2.REQUIREMENTS Eee403abdullahfatayerNo ratings yet
- CH 2Document11 pagesCH 2DƯƠNG NGUYỄN THÁI BÌNHNo ratings yet
- Siemens SW Model Based Systems Engineering To Model Based E - E Architecture WP - tcm27 109079Document10 pagesSiemens SW Model Based Systems Engineering To Model Based E - E Architecture WP - tcm27 109079beto rodriguezNo ratings yet
- Validation of Desktop Simulation - The Path Towards Real-Time SimulationDocument44 pagesValidation of Desktop Simulation - The Path Towards Real-Time SimulationAtharva Joshi.No ratings yet
- 641ab25945baae16a7440926 Acrome Datasheet 1DOFHelicopterDocument2 pages641ab25945baae16a7440926 Acrome Datasheet 1DOFHelicopterChinhNo ratings yet
- Co-Synthesis of Hardware and Software For Digital Embedded SystemsDocument274 pagesCo-Synthesis of Hardware and Software For Digital Embedded SystemsANNAPUREDDY RAVINDER REDDYNo ratings yet
- Hardwareintheloop Simulation Testing and Its Integration Into ADocument5 pagesHardwareintheloop Simulation Testing and Its Integration Into ATuan AnhNo ratings yet
- Mil Sil PilDocument87 pagesMil Sil Pilmdur67No ratings yet
- CIRED2017 - 0057 - Final RULES DRIVEN PROJECT SPECIFICATION IN THE CONTEXT OF IEC 61850 BASIC APPLICATION PROFILESDocument5 pagesCIRED2017 - 0057 - Final RULES DRIVEN PROJECT SPECIFICATION IN THE CONTEXT OF IEC 61850 BASIC APPLICATION PROFILESChris ParkinsonNo ratings yet
- Introduction To Software EngineeringDocument20 pagesIntroduction To Software Engineeringesen turkayNo ratings yet
- Hardware-In-The-loop Simulation For The Design and Testing of Engine-Control SystemsDocument11 pagesHardware-In-The-loop Simulation For The Design and Testing of Engine-Control SystemsAngel FajmNo ratings yet
- Adv and Disadv of Real Time SimulationDocument9 pagesAdv and Disadv of Real Time SimulationGhulam AbbasNo ratings yet
- A Unified Framework For The Design of Distributed Cyber-Physical Systems - Industrial Automation ExampleDocument7 pagesA Unified Framework For The Design of Distributed Cyber-Physical Systems - Industrial Automation ExamplezainabNo ratings yet
- D2A1 1 2 ESL Virtual Hardware SetupDocument15 pagesD2A1 1 2 ESL Virtual Hardware SetupRaj Shekhar ReddyNo ratings yet
- 14 Industrial Automation Engineer PDFDocument2 pages14 Industrial Automation Engineer PDFpritish_09No ratings yet
- 5 Jackey2007Document11 pages5 Jackey2007Đức CaoNo ratings yet
- Poster DT Itris-AutomationDocument2 pagesPoster DT Itris-AutomationAlvaro ValdiviaNo ratings yet
- Chapter #4: Introducti On To PLCDocument40 pagesChapter #4: Introducti On To PLCPavi TranNo ratings yet
- Time-Delay Compensation For Actuator-Based Hardware-In-The-loop Testing of A Jet Engine Fuel Control UnitDocument11 pagesTime-Delay Compensation For Actuator-Based Hardware-In-The-loop Testing of A Jet Engine Fuel Control UnitTuan AnhNo ratings yet
- IEEE PES Meeting: Marc L. Hunter Foxboro A Automation Platform Business Manager North AmericanDocument28 pagesIEEE PES Meeting: Marc L. Hunter Foxboro A Automation Platform Business Manager North AmericanAndi CahyantoNo ratings yet
- 1 - Introduction - 2Document44 pages1 - Introduction - 2Mahmudul HasanNo ratings yet
- Vehicle Dynamics: Driving Innovation inDocument8 pagesVehicle Dynamics: Driving Innovation infranklinNo ratings yet
- IEC61508 Compliant,: Dependable Robot SystemDocument15 pagesIEC61508 Compliant,: Dependable Robot SystemPrakash KumarNo ratings yet
- HANDOUT - Rapid Control Prototyping With MATLAB PDFDocument19 pagesHANDOUT - Rapid Control Prototyping With MATLAB PDFmiaauuwwNo ratings yet
- (Ixjil), ( W,: Advanced Ecu Software Development Method For Fuel Cell SystemsDocument8 pages(Ixjil), ( W,: Advanced Ecu Software Development Method For Fuel Cell SystemsJoshua sam jNo ratings yet
- 56 - A Learning Model For 8051 Microcontroller Case Study On Closed Loop DC Motor Speed Control PDFDocument7 pages56 - A Learning Model For 8051 Microcontroller Case Study On Closed Loop DC Motor Speed Control PDFhecirlene vieiraNo ratings yet
- Object-Oriented Simulation with Hierarchical, Modular Models: Intelligent Agents and Endomorphic SystemsFrom EverandObject-Oriented Simulation with Hierarchical, Modular Models: Intelligent Agents and Endomorphic SystemsRating: 1 out of 5 stars1/5 (1)
- Power Systems Engineering and Mathematics: International Series of Monographs in Electrical EngineeringFrom EverandPower Systems Engineering and Mathematics: International Series of Monographs in Electrical EngineeringNo ratings yet
- Air Compressors - Rules of ThumbDocument2 pagesAir Compressors - Rules of ThumbtylerstearnsNo ratings yet
- Distributed Computing (S1-20 - SSZG526)Document4 pagesDistributed Computing (S1-20 - SSZG526)Pavan VannemreddyNo ratings yet
- Chap 1306 - AkDocument52 pagesChap 1306 - AkJohnathan GriffithNo ratings yet
- Terminals of Ecu: Radio Receiver AssemblyDocument11 pagesTerminals of Ecu: Radio Receiver AssemblyJack CardiagNo ratings yet
- Account NameDocument9 pagesAccount NameTest MailNo ratings yet
- OfferLetter ENGGDocument2 pagesOfferLetter ENGGDhruv JennieNo ratings yet
- UDILIPSE USER MANUAL 1.0.2 (New)Document265 pagesUDILIPSE USER MANUAL 1.0.2 (New)ahmed mikawyNo ratings yet
- RDF 6Document7 pagesRDF 6Tommy ChristiantoNo ratings yet
- Modicon MC80 Programmable Logic Controller User ManualDocument151 pagesModicon MC80 Programmable Logic Controller User ManualdeadzzzzzzzzzzzzNo ratings yet
- Rosemount Inc. 1495 - Standard Orifice ISO 5167 (2003) Calculation Data SheetDocument1 pageRosemount Inc. 1495 - Standard Orifice ISO 5167 (2003) Calculation Data SheetMamta DeshmukhNo ratings yet
- ZMovement Patching GuideDocument2 pagesZMovement Patching Guidesegey38547No ratings yet
- T Test ( Unknown) : Hypothesis Testing Refers To The Formal Procedures Used by Statisticians To Accept or RejectDocument10 pagesT Test ( Unknown) : Hypothesis Testing Refers To The Formal Procedures Used by Statisticians To Accept or RejectPayal DhameliyaNo ratings yet
- 2021-03-15 Fiche Technique LG - NeON - H - Bifacial - N2T - E6 - 440Document2 pages2021-03-15 Fiche Technique LG - NeON - H - Bifacial - N2T - E6 - 440RadoineMarzaukNo ratings yet
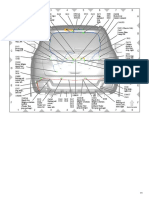
- Front of VehicleDocument11 pagesFront of VehiclekakaNo ratings yet
- WritingDocument120 pagesWritingMuhamad IbrohimNo ratings yet
- Service Manual Nw-A30 1.1Document54 pagesService Manual Nw-A30 1.1alexandru ilieNo ratings yet
- Etiquette of Written Word (Unit-4)Document2 pagesEtiquette of Written Word (Unit-4)Ayush GuptaNo ratings yet
- Tender NoticeDocument5 pagesTender NoticeBarkat KhanNo ratings yet
- Panzer Recruitment SolutionsDocument12 pagesPanzer Recruitment SolutionsManushi GuptaNo ratings yet
- All MCQDocument16 pagesAll MCQsfdsf fsdNo ratings yet
- NVDA F1Q23 Investor Presentation FINALDocument49 pagesNVDA F1Q23 Investor Presentation FINALTanjim RahmanNo ratings yet
- Technocracy Reloaded Preview Manuscript 3Document96 pagesTechnocracy Reloaded Preview Manuscript 3KiffNo ratings yet
- Huawei AirEngine 6760R-51 & AirEngine 6760R-51E Access Points DatasheetDocument15 pagesHuawei AirEngine 6760R-51 & AirEngine 6760R-51E Access Points DatasheetMarina PavlićNo ratings yet
- ING-0656 - Considerations GE CEOD AnalysisDocument6 pagesING-0656 - Considerations GE CEOD AnalysistangautaNo ratings yet
- Lab ManualDocument47 pagesLab Manualsankethpv15082003No ratings yet
- CCNA ICND2 640-816 Official Cert Guide, 3rd Edition PDFDocument94 pagesCCNA ICND2 640-816 Official Cert Guide, 3rd Edition PDFJoko Handoyo100% (1)
- FMP PereesureDocument10 pagesFMP Pereesuremohsen alvaniNo ratings yet
- CS711 - Design Pattern'sDocument44 pagesCS711 - Design Pattern'sSahar RazaNo ratings yet
- Applications of Social Research Methods To Questions in Information and Library Science Second Edition Barbara M. WildemuthDocument54 pagesApplications of Social Research Methods To Questions in Information and Library Science Second Edition Barbara M. Wildemuthsara.gleim919100% (19)