Download as pdf or txt
You might also like
- Full Download Ebook Ebook PDF Microbiology With Diseases by Taxonomy 5th Edition PDFDocument40 pagesFull Download Ebook Ebook PDF Microbiology With Diseases by Taxonomy 5th Edition PDFmicheal.cooper97498% (42)
- Index: Study of Common Food Adulterants in Fat, Oil, Butter, Sugar, Turmeric Power, Chilli Powder and PepperDocument10 pagesIndex: Study of Common Food Adulterants in Fat, Oil, Butter, Sugar, Turmeric Power, Chilli Powder and PepperNm alihussain88% (65)
- CIDocument98 pagesCIRameez NNo ratings yet
- M4 AI Ktustundets - in CS464 Artificial IntelligenceDocument11 pagesM4 AI Ktustundets - in CS464 Artificial Intelligencebbh lover4No ratings yet
- Rule Based Expert System: Software Experts Problem Domain Artificial IntelligenceDocument12 pagesRule Based Expert System: Software Experts Problem Domain Artificial IntelligenceRajan Kumar SinghNo ratings yet
- University Paper Solution 2021-22Document12 pagesUniversity Paper Solution 2021-22divanshusalesforceNo ratings yet
- Artificial Intelligence: Fuzzy Logic (FL)Document12 pagesArtificial Intelligence: Fuzzy Logic (FL)Sounds You WantNo ratings yet
- 18CS753 Ai Module 4Document43 pages18CS753 Ai Module 4Arham SyedNo ratings yet
- Adversarial Search MinMax Alpha Beta PruningDocument43 pagesAdversarial Search MinMax Alpha Beta PruningDeepakraj SNo ratings yet
- AimidreviewerDocument4 pagesAimidreviewermart arvyNo ratings yet
- Unit II Games and Search StrategiesDocument31 pagesUnit II Games and Search Strategiesm10k4tmgw5No ratings yet
- 18cs753 Ai Module 4Document44 pages18cs753 Ai Module 4Rachana KumariNo ratings yet
- INT 354 CA1 MokshagnaDocument8 pagesINT 354 CA1 MokshagnaPraveen Kumar UmmidiNo ratings yet
- A - Mini - Project - Report - Tic - Tac - Toe 12Document18 pagesA - Mini - Project - Report - Tic - Tac - Toe 12aniket sonwane aniketNo ratings yet
- 18cs753 Ai Module 4Document44 pages18cs753 Ai Module 4satarekarpremNo ratings yet
- Ai NotesDocument13 pagesAi NotesHitesh MahiNo ratings yet
- Unit 4 NNDocument8 pagesUnit 4 NNBaby SauravNo ratings yet
- 70 37 196 CST401ai Module-3notesDocument35 pages70 37 196 CST401ai Module-3notesFaris BashaNo ratings yet
- Pruning Game Tree by Rollouts: Bojun HuangDocument13 pagesPruning Game Tree by Rollouts: Bojun HuangBojun HuangNo ratings yet
- Unit 2Document11 pagesUnit 2hollowpurple156No ratings yet
- Analysis of The Alpha-Beta Pruning AlgorithmDocument56 pagesAnalysis of The Alpha-Beta Pruning AlgorithmBoaz TanuiNo ratings yet
- Module 2 Topic 4Document9 pagesModule 2 Topic 4Robinson WambuaNo ratings yet
- Unit - 2Document9 pagesUnit - 2298hrqr66nNo ratings yet
- Artificial Intelligence On "Dots & Boxes" Game: Mehdi Kabir June 2, 2004Document19 pagesArtificial Intelligence On "Dots & Boxes" Game: Mehdi Kabir June 2, 2004Devashish RajNo ratings yet
- User Interface Which May Use Menus, Natural Language or Any OtherDocument4 pagesUser Interface Which May Use Menus, Natural Language or Any OtherUtkarsh HsraktuNo ratings yet
- Adversarial Search: Chapter Five in BookDocument35 pagesAdversarial Search: Chapter Five in BookPrashaman PokharelNo ratings yet
- ML Model Paper 3 SolutionDocument22 pagesML Model Paper 3 SolutionRoger kujurNo ratings yet
- 20BCP238Document4 pages20BCP238MR.NAITIK PATELNo ratings yet
- A Mini Project Report Tic Tac ToeDocument11 pagesA Mini Project Report Tic Tac ToekapuNo ratings yet
- Adversial SearchDocument39 pagesAdversial SearchIM AM INEVITABLENo ratings yet
- CPP SarthakDocument52 pagesCPP Sarthakaryannagdev8No ratings yet
- Ai-Module 2Document47 pagesAi-Module 2edemo6870No ratings yet
- Tic-Tac-Toe AI Player Using Minimax and Alpha-Beta PruningDocument15 pagesTic-Tac-Toe AI Player Using Minimax and Alpha-Beta PruningKaartiikBenNo ratings yet
- L06 (Adversarial Search) OriDocument46 pagesL06 (Adversarial Search) Orimehedi.ratul111No ratings yet
- AlgorithmsDocument11 pagesAlgorithmsmeghana09No ratings yet
- Game Playing in AIDocument12 pagesGame Playing in AIAnonymous DFpzhrRNo ratings yet
- English (US) Home Community Submit A Request: Help Center Sign inDocument14 pagesEnglish (US) Home Community Submit A Request: Help Center Sign inAkram Abbas KhalafNo ratings yet
- Supervised Learning (Classification and Regression)Document14 pagesSupervised Learning (Classification and Regression)shreya sarkarNo ratings yet
- Intro To Ai AssingmentDocument5 pagesIntro To Ai Assingmentchoudharyusman297No ratings yet
- MB0048 or Solved Winter Drive Assignment 2012Document9 pagesMB0048 or Solved Winter Drive Assignment 2012Pawan KumarNo ratings yet
- Using Double-Oracle Method and Serialized Alpha-Beta Search For Pruning in Simultaneous Move GamesDocument7 pagesUsing Double-Oracle Method and Serialized Alpha-Beta Search For Pruning in Simultaneous Move GamesMichaelaŠtolováNo ratings yet
- Game Playing: MIN-MAX SearchDocument6 pagesGame Playing: MIN-MAX Searchanon_565693848No ratings yet
- ML Super ImpDocument19 pagesML Super Impread4freeNo ratings yet
- AD8402 - Artificial Intelligence (Unit III)Document24 pagesAD8402 - Artificial Intelligence (Unit III)Muthukumaran CNo ratings yet
- Comparison of Parallel Adversarial Search Algorithms: February 14, 2011Document10 pagesComparison of Parallel Adversarial Search Algorithms: February 14, 2011Aliens InvadeNo ratings yet
- Master OF Business Administration: Second SemesterDocument9 pagesMaster OF Business Administration: Second SemesterHarman ChanderNo ratings yet
- Game PlayingDocument53 pagesGame PlayingFairooz TorosheNo ratings yet
- Day 3Document32 pagesDay 3Dishant GuptaNo ratings yet
- Introduction To ML Partial 2 PDFDocument54 pagesIntroduction To ML Partial 2 PDFLesocrateNo ratings yet
- AI 04 AdversarialDocument30 pagesAI 04 AdversarialDebashish DekaNo ratings yet
- 8 Tree Searching Algorithms: H. KaindlDocument2 pages8 Tree Searching Algorithms: H. Kaindldaeas jeryNo ratings yet
- Adaptive Cooperative Fuzzy Logic Controller: Justin Ammerlaan David WrightDocument9 pagesAdaptive Cooperative Fuzzy Logic Controller: Justin Ammerlaan David Wrightmenilanjan89nLNo ratings yet
- Unit 1Document15 pagesUnit 1Yash GandharvNo ratings yet
- AI Ca1Document11 pagesAI Ca1Debasis GaraiNo ratings yet
- Seminar PPT (Minimax Algorithm)Document35 pagesSeminar PPT (Minimax Algorithm)Ashish Sabade100% (1)
- Ai-Unit-Iii NotesDocument46 pagesAi-Unit-Iii NotesCharan 'sNo ratings yet
- DSA Assignment I006Document8 pagesDSA Assignment I006Sanket ChavanNo ratings yet
- Alpha Beta Pruning For Games With SimultDocument7 pagesAlpha Beta Pruning For Games With SimultMax Jordan DooleyNo ratings yet
- Sambaran Das - CSEDocument15 pagesSambaran Das - CSESayan Kar ChoudhuryNo ratings yet
- ALGO NotesDocument24 pagesALGO NoteszomukozaNo ratings yet
- Statement Coverage TestingDocument10 pagesStatement Coverage TestingNANDHINI AKNo ratings yet
- Unit Iii: Reasoning Under Uncertainty: Logics of Non-Monotonic Reasoning - Implementation-BasicDocument24 pagesUnit Iii: Reasoning Under Uncertainty: Logics of Non-Monotonic Reasoning - Implementation-BasicNANDHINI AKNo ratings yet
- Department of Computer Science and Engineering: Subject Name: Subject Code: CS E71Document63 pagesDepartment of Computer Science and Engineering: Subject Name: Subject Code: CS E71NANDHINI AKNo ratings yet
- ND RD TH TH ST TH THDocument4 pagesND RD TH TH ST TH THNANDHINI AKNo ratings yet
- Coding Test: MCQDocument6 pagesCoding Test: MCQNANDHINI AKNo ratings yet
- Web Tech PDFDocument148 pagesWeb Tech PDFNANDHINI AKNo ratings yet
- Es UNIT IV PDFDocument24 pagesEs UNIT IV PDFNANDHINI AKNo ratings yet
- Anoedipal Fiction - Schizo Analysis and The Black DahliaDocument43 pagesAnoedipal Fiction - Schizo Analysis and The Black DahliaAline SanNo ratings yet
- 12 Critical Chain Project ManagementDocument50 pages12 Critical Chain Project Managementashisb444No ratings yet
- 11 Physics Chapter 14 and 15 Assignment 5Document2 pages11 Physics Chapter 14 and 15 Assignment 5Mohd UvaisNo ratings yet
- Dispersion PollutantsDocument18 pagesDispersion PollutantsAmira GogoantaNo ratings yet
- 5s Audit Checklist and Performance Measurement SystemDocument31 pages5s Audit Checklist and Performance Measurement Systemkhurram khanNo ratings yet
- Eurocode 2 - Plain Concrete StructuresDocument24 pagesEurocode 2 - Plain Concrete StructureshasithrNo ratings yet
- Learning Module 1 1Document16 pagesLearning Module 1 1BConstantino, Jan Louie Z.No ratings yet
- Subject Name: Biology 9Document22 pagesSubject Name: Biology 9Naveed Ahmed ButtNo ratings yet
- Grundfosliterature 5992761Document22 pagesGrundfosliterature 5992761BENJAMIN NIAMYNo ratings yet
- Compilation On Clifford Geertz TeachingsDocument25 pagesCompilation On Clifford Geertz TeachingsRobby Jane SalveronNo ratings yet
- Analog Communication W3Document9 pagesAnalog Communication W3Subhajit BhattacharyyaNo ratings yet
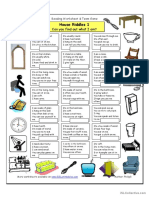
- House Riddles (1) - EasyDocument3 pagesHouse Riddles (1) - EasyMiyasar AzatbaevaNo ratings yet
- Adina ModelisationDocument240 pagesAdina ModelisationSafia SoufiNo ratings yet
- Advanced 250 V Three-Phase BLDC Controller With Embedded STM32 MCUDocument32 pagesAdvanced 250 V Three-Phase BLDC Controller With Embedded STM32 MCUOne SpringNo ratings yet
- Calculate The Wetted Surface Area of Pressure VesselsDocument7 pagesCalculate The Wetted Surface Area of Pressure VesselsHsein WangNo ratings yet
- Carrier Air Cooled Liquid Chillers 30GH GZ Series DatasheetDocument16 pagesCarrier Air Cooled Liquid Chillers 30GH GZ Series DatasheetQazertNo ratings yet
- AC Generator TheroryDocument11 pagesAC Generator TheroryM Kumar MarimuthuNo ratings yet
- WASS Form Proposal Adriana Ressiore Questions UpdatedDocument19 pagesWASS Form Proposal Adriana Ressiore Questions UpdatedMaria Fernanda MatosNo ratings yet
- Four Quadrant OperationDocument6 pagesFour Quadrant OperationMohammed OvaizNo ratings yet
- Physical Sciences P1 Feb March 2018 EngDocument20 pagesPhysical Sciences P1 Feb March 2018 EngKoketso LetswaloNo ratings yet
- Optimizing HPLC Methods 1684601740Document46 pagesOptimizing HPLC Methods 1684601740AlexandreLuizdeSouzaNo ratings yet
- C.D. To CompleteDocument20 pagesC.D. To CompleteBenmark JabayNo ratings yet
- Additional Charges of Daos in Agt 2019Document17 pagesAdditional Charges of Daos in Agt 2019heraldNo ratings yet
- Albert GerberDocument3 pagesAlbert Gerberhot_teeth100% (1)
- A202Document3 pagesA202Edisson CordovaNo ratings yet
- Lubrication SystemDocument43 pagesLubrication Systemkebaman1986No ratings yet
- Electricity Worksheet Physics GcseDocument5 pagesElectricity Worksheet Physics Gcsetun1123tNo ratings yet
- Chemostat Recycle (Autosaved)Document36 pagesChemostat Recycle (Autosaved)Zeny Naranjo0% (1)