Download as pdf or txt
You might also like
- Step 2 CK BibleDocument435 pagesStep 2 CK Biblewilksebas100% (13)
- Design Calculation of Working Platform-1Document26 pagesDesign Calculation of Working Platform-1Khandaker Khairul Alam100% (1)
- Item:130ST Series Servo Motor: SpecificationsDocument4 pagesItem:130ST Series Servo Motor: Specificationsn13t0314No ratings yet
- AlxionDocument16 pagesAlxionJoe ArNo ratings yet
- p310 Disc Magnet Stepper Motor DatasheetDocument1 pagep310 Disc Magnet Stepper Motor Datasheetjunk andshitNo ratings yet
- MD250MW CAN DataSheet 1642812289Document1 pageMD250MW CAN DataSheet 1642812289masNo ratings yet
- Johnson 1980 Specs 8005Document1 pageJohnson 1980 Specs 8005Chris MenchionNo ratings yet
- Fixed Speed Linear Actuator Motor FamilyDocument3 pagesFixed Speed Linear Actuator Motor Familyias2008No ratings yet
- Winding Data For 1600 FrameDocument35 pagesWinding Data For 1600 FrameHalit yalçınkayaNo ratings yet
- Electric Poker Vibrators & Frequency ConvertersDocument8 pagesElectric Poker Vibrators & Frequency ConvertersIgor Halterbeck HalterbeckNo ratings yet
- Electrical Data P532 258 012 10 (Series) P532 258 004 10 (Series) P532 258 004 10 (Parallel) P532 258 0.7 10 (Parallel)Document1 pageElectrical Data P532 258 012 10 (Series) P532 258 004 10 (Series) P532 258 004 10 (Parallel) P532 258 0.7 10 (Parallel)Anas SharholiNo ratings yet
- P852 - 177motor PasoapasoDocument2 pagesP852 - 177motor PasoapasoLautaro Troffel100% (1)
- Model:: AE2415Y-FZ1BDocument10 pagesModel:: AE2415Y-FZ1BSigit MaulanaNo ratings yet
- HME DR GM60A Datasheet v1.7 161012Document4 pagesHME DR GM60A Datasheet v1.7 161012Sebastian SamolewskiNo ratings yet
- Ae4440y Fz1aDocument3 pagesAe4440y Fz1aJean Carlos ValeraNo ratings yet
- 16n28 Brushed DC Motor DatasheetDocument1 page16n28 Brushed DC Motor DatasheetPaweł DoboszNo ratings yet
- Ae2425z FZ1CDocument4 pagesAe2425z FZ1CMageon7No ratings yet
- Manual de Operacion DGW310MC 220Document11 pagesManual de Operacion DGW310MC 220Uma A. UcheNo ratings yet
- ZS00019 (Generator Data Sheet)Document21 pagesZS00019 (Generator Data Sheet)aqccc120No ratings yet
- Data Sheet Stepper Motor SupportDocument4 pagesData Sheet Stepper Motor Supportskymax1337No ratings yet
- CD518 HV - Equipment Data Sheet - Rev4Document2 pagesCD518 HV - Equipment Data Sheet - Rev4Evanilson NogueiraNo ratings yet
- Turbo Disc P850/P 852: Stepper MotorDocument1 pageTurbo Disc P850/P 852: Stepper Motoryuran111No ratings yet
- Technical Characteristics 145 STK Alternators: Alternator 145STK Power - SpeedDocument1 pageTechnical Characteristics 145 STK Alternators: Alternator 145STK Power - SpeedElias FigueroaNo ratings yet
- Welding Generators MPMDocument1 pageWelding Generators MPMLucioNo ratings yet
- M4 420X Electrical Specification 92Document1 pageM4 420X Electrical Specification 92Aleksa MilenkovicNo ratings yet
- Omega Turbine Sel GuideDocument4 pagesOmega Turbine Sel GuideHossam MagrabyNo ratings yet
- AC Servomotor 110SFDocument4 pagesAC Servomotor 110SFrumenNo ratings yet
- OMRONDocument14 pagesOMRONwirawansatriaNo ratings yet
- DS Servo Motor ACM604V60-01-2500 enDocument3 pagesDS Servo Motor ACM604V60-01-2500 enRafael Morais MachadoNo ratings yet
- Specifications: Standards and Service LimitsDocument22 pagesSpecifications: Standards and Service Limitscarlosm6669No ratings yet
- Resolver RE15 - 21 - 03 - 02Document8 pagesResolver RE15 - 21 - 03 - 02Gonzalo RiosNo ratings yet
- Compressor Tecumseh AE4440Y-AA1ADocument12 pagesCompressor Tecumseh AE4440Y-AA1AMan ManNo ratings yet
- Incremental and Absolute Rotary EncoderDocument9 pagesIncremental and Absolute Rotary EncoderGabriel FlorNo ratings yet
- Crouzet 2006 156Document2 pagesCrouzet 2006 156Irina BesliuNo ratings yet
- G493 Series Servo MotorsDocument4 pagesG493 Series Servo MotorsIain JubbNo ratings yet
- Ae4450z Es1bDocument6 pagesAe4450z Es1bAndres VargazNo ratings yet
- Three Phase Induction Motor - Squirrel Cage: Data SheetDocument44 pagesThree Phase Induction Motor - Squirrel Cage: Data SheetAnas ElwakilNo ratings yet
- Ae4460e FZ1B PDFDocument4 pagesAe4460e FZ1B PDFMateo AcuñaNo ratings yet
- THG1365YLSDocument4 pagesTHG1365YLSRolando LopezNo ratings yet
- TPS54360 CaculationDocument109 pagesTPS54360 CaculationKhưu Minh TấnNo ratings yet
- Atom Arc 8018Document2 pagesAtom Arc 8018Jagan TnNo ratings yet
- Model: AED2413ZHZ (CAE2417Z) : Technical Data SheetDocument3 pagesModel: AED2413ZHZ (CAE2417Z) : Technical Data SheetMarisol Saavedra100% (1)
- Stepper Motor Support Document-1Document5 pagesStepper Motor Support Document-1Alex BurdukNo ratings yet
- Ae4460e FZ1BDocument4 pagesAe4460e FZ1BMageon7No ratings yet
- DR24 KkaDocument7 pagesDR24 KkaAriel VicuñaNo ratings yet
- LED Lighting Cooling Module: Solution For LED Light Engine ManufacturersDocument2 pagesLED Lighting Cooling Module: Solution For LED Light Engine ManufacturersDurga Prasad BoppanaNo ratings yet
- Ts 400VII 520BDocument2 pagesTs 400VII 520Btou kaiNo ratings yet
- Ae Lift Electrical SpecificationsDocument1 pageAe Lift Electrical Specifications8819133No ratings yet
- Datasheet LF GZTACSR 420-50 TWDocument1 pageDatasheet LF GZTACSR 420-50 TWTú Trần TuấnNo ratings yet
- Ae1420z FZ1B PDFDocument8 pagesAe1420z FZ1B PDFMateo AcuñaNo ratings yet
- Winding Data For 3000frameDocument73 pagesWinding Data For 3000frameHalit YalçınkayaNo ratings yet
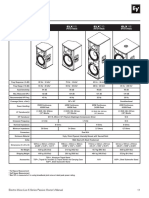
- Live-X Passive SpecificationsDocument1 pageLive-X Passive SpecificationsValentin DragoiNo ratings yet
- 240 AC Models - Platypus PowerDocument7 pages240 AC Models - Platypus Powerrabei romulusNo ratings yet
- UT139 Series FlyerDocument1 pageUT139 Series Flyermiyer.roseroNo ratings yet
- WEG 132kW 315frame 2pole B5Document23 pagesWEG 132kW 315frame 2pole B5A aaa AaaNo ratings yet
- Final Task Power RatingDocument1 pageFinal Task Power RatingDhiviyansh Punamiya OT3 - 433No ratings yet
- Technical Characteristics 190 STK Alternators: Alternator 190STK Power - SpeedDocument1 pageTechnical Characteristics 190 STK Alternators: Alternator 190STK Power - SpeedTrương Anh DuyNo ratings yet
- Power Solid State Relays G3PA: Ordering InformationDocument11 pagesPower Solid State Relays G3PA: Ordering InformationtotovasiNo ratings yet
- Hyperion Atlas Programmable Digital Servos - Ds16, Ds20, Ds20X Series SpecificationsDocument1 pageHyperion Atlas Programmable Digital Servos - Ds16, Ds20, Ds20X Series Specificationsmohamed sidkyNo ratings yet
- Electricity in Fish Research and Management: Theory and PracticeFrom EverandElectricity in Fish Research and Management: Theory and PracticeNo ratings yet
- SP80 BrochureDocument4 pagesSP80 BrochureRatnesh BafnaNo ratings yet
- NanoScan2s 2Document8 pagesNanoScan2s 2Ratnesh BafnaNo ratings yet
- Coherent I300C Manual 2014123112056Document74 pagesCoherent I300C Manual 2014123112056Ratnesh BafnaNo ratings yet
- I - Data Sheet of Voice Coil Actuator For Iit Bombay 32-30 ModelDocument1 pageI - Data Sheet of Voice Coil Actuator For Iit Bombay 32-30 ModelRatnesh BafnaNo ratings yet
- MR02D01 02 Radial Incremental Magnetic Rings BookmarkDocument54 pagesMR02D01 02 Radial Incremental Magnetic Rings BookmarkRatnesh BafnaNo ratings yet
- Acousto-Optic Modulators QUOTATION I-M110-2C10B6Document1 pageAcousto-Optic Modulators QUOTATION I-M110-2C10B6Ratnesh BafnaNo ratings yet
- Mercury II 5000 Series Encoders: High Performance Encoders With Digital OutputDocument21 pagesMercury II 5000 Series Encoders: High Performance Encoders With Digital OutputRatnesh BafnaNo ratings yet
- SP80 SP80H Technical PaperDocument10 pagesSP80 SP80H Technical PaperRatnesh BafnaNo ratings yet
- MicroESystems CatalogDocument16 pagesMicroESystems CatalogRatnesh BafnaNo ratings yet
- Linear Motor: Power Cable: The Bending Radius of The Motor Cable Should Be 30mm, WireDocument1 pageLinear Motor: Power Cable: The Bending Radius of The Motor Cable Should Be 30mm, WireRatnesh BafnaNo ratings yet
- Atom Miniature Encoder System: Data SheetDocument22 pagesAtom Miniature Encoder System: Data SheetRatnesh BafnaNo ratings yet
- DS 2102 Juke Motors Data Sheet EnglishDocument4 pagesDS 2102 Juke Motors Data Sheet EnglishRatnesh BafnaNo ratings yet
- Book On LifeDocument12 pagesBook On LifeRatnesh BafnaNo ratings yet
- Photoinitiators From AldrichDocument15 pagesPhotoinitiators From AldrichRatnesh BafnaNo ratings yet
- Soils OBJ Solved - 070021Document17 pagesSoils OBJ Solved - 070021Antoinette Wiafe100% (1)
- Industrial PaintingDocument312 pagesIndustrial Paintingyoners1691No ratings yet
- Ashghal - Silent Login: AcknowledgementsDocument4 pagesAshghal - Silent Login: AcknowledgementsSyed QasimNo ratings yet
- Advanced 250 V Three-Phase BLDC Controller With Embedded STM32 MCUDocument32 pagesAdvanced 250 V Three-Phase BLDC Controller With Embedded STM32 MCUOne SpringNo ratings yet
- Polaris Ranger ManualDocument110 pagesPolaris Ranger ManualdarinNo ratings yet
- ENGLISHDocument4 pagesENGLISHALLISONNo ratings yet
- FiberTec PPS Application v3 01Document7 pagesFiberTec PPS Application v3 01tsoheilNo ratings yet
- C.D. To CompleteDocument20 pagesC.D. To CompleteBenmark JabayNo ratings yet
- Statistical PackagesDocument18 pagesStatistical Packagesannie naeemNo ratings yet
- Emily Gerard Transylvanian SuperstitionsDocument4 pagesEmily Gerard Transylvanian SuperstitionsErzsebet HeghyekNo ratings yet
- Thesis Statement For One Hundred Years of SolitudeDocument6 pagesThesis Statement For One Hundred Years of Solitudegxirgjwff100% (2)
- Dmitri Ivanovich MendeleevDocument4 pagesDmitri Ivanovich MendeleevEmmanuel OfforNo ratings yet
- Mock Grant ProposalDocument38 pagesMock Grant ProposalargautreauNo ratings yet
- Singapore TerminalDocument9 pagesSingapore TerminalKai Yuan TeoNo ratings yet
- 7-Day Metabolism Repair Rapid Fat LossDocument27 pages7-Day Metabolism Repair Rapid Fat LossLennart Bjurstrom100% (1)
- DKMU Fulfilled Wishes Fulfilled LivesDocument22 pagesDKMU Fulfilled Wishes Fulfilled LivesRick DHMNo ratings yet
- To Be Head Over All Things To The Church,: Ephesians 1 17-23 - 17Document4 pagesTo Be Head Over All Things To The Church,: Ephesians 1 17-23 - 17Niyi FunminiyiNo ratings yet
- Impact of Electricity Power OutagesDocument13 pagesImpact of Electricity Power OutagesGaspard UkwizagiraNo ratings yet
- Vehicle Tracking SystemDocument21 pagesVehicle Tracking SystemkailasasundaramNo ratings yet
- Mapeh 7 Mya Assessment ToolDocument13 pagesMapeh 7 Mya Assessment ToolJnl RgndnNo ratings yet
- Socrates and PsychotherapyDocument6 pagesSocrates and PsychotherapyKai ChuaNo ratings yet
- Industry ProfileDocument41 pagesIndustry Profile727821TPMB018 ARAVINTH S.No ratings yet
- United International University: EEE 424: Microprocessor and Interfacing Laboratory Experiment#5Document7 pagesUnited International University: EEE 424: Microprocessor and Interfacing Laboratory Experiment#5Nura Alam ProtikNo ratings yet
- Vocabulary HSC 22 PDFDocument28 pagesVocabulary HSC 22 PDFMadara Uchiha83% (6)
- 100 Korean Proverbs With Meanings For TOPIK 2Document19 pages100 Korean Proverbs With Meanings For TOPIK 2Rumah Sakit Bhakti NugrahaNo ratings yet
- DT KCDocument10 pagesDT KCbettieboomNo ratings yet
- Analog Communication W3Document9 pagesAnalog Communication W3Subhajit BhattacharyyaNo ratings yet
- Advanced GrammarDocument73 pagesAdvanced GrammarBehnam iziNo ratings yet