
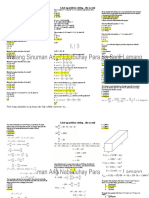
Newmark Method November 2014 Mac
Newmark Method November 2014 Mac
You might also like
- Worksheet VelocityDocument1 pageWorksheet Velocityanon_78301203367% (3)
- Complete Answers - Physics Form 5 TBDocument36 pagesComplete Answers - Physics Form 5 TBAlexandra Chieng80% (5)
- The Matrix Exponential (With Exercises) by Dan Klain Corrections and Comments Are WelcomeDocument8 pagesThe Matrix Exponential (With Exercises) by Dan Klain Corrections and Comments Are Welcomeabcdfr2No ratings yet
- Propagation of EM WaveDocument43 pagesPropagation of EM WaveVipul GargNo ratings yet
- Individual Assignment 5Document3 pagesIndividual Assignment 5Sirak Masresha0% (1)
- Concept Map of Big Bang TheoryDocument1 pageConcept Map of Big Bang Theorybelgacac396744% (9)
- 70 - ProblemsDocument14 pages70 - ProblemsDon Joseph Rene Omandac100% (1)
- Linear Acceleration Method November 5 2014 MacDocument3 pagesLinear Acceleration Method November 5 2014 MacAzeemuddin Gulam MohammedNo ratings yet
- Linear TransformationDocument42 pagesLinear TransformationBOAMPONG DENNISNo ratings yet
- 6 - L-10 (DK) (Pe) ( (Ee) Nptel)Document1 page6 - L-10 (DK) (Pe) ( (Ee) Nptel)GagneNo ratings yet
- Volume 1 No. 2 Pp. 112-122 (2013) C: Transmuted Exponentiated Exponential DistributionDocument11 pagesVolume 1 No. 2 Pp. 112-122 (2013) C: Transmuted Exponentiated Exponential DistributionWilson Caimanque Sede VallenarNo ratings yet
- Unitary and Hermitian MatricesDocument8 pagesUnitary and Hermitian MatricesJo PopscNo ratings yet
- Soln 6dDocument5 pagesSoln 6dOliverSpurgeonNo ratings yet
- Rayleigh Drag EquationDocument5 pagesRayleigh Drag EquationDr. LawlisNo ratings yet
- AERO455 Assignment 00Document6 pagesAERO455 Assignment 00christian rowsellNo ratings yet
- C&DE Unitwise FormulaeDocument22 pagesC&DE Unitwise FormulaeLalit jadhavNo ratings yet
- Relativity 2Document7 pagesRelativity 2Ayorinde T TundeNo ratings yet
- Dynamics - Lesson 11& 12Document11 pagesDynamics - Lesson 11& 12Vimukthi LakshanNo ratings yet
- The Properties of Determinants:: 11 22 II NNDocument15 pagesThe Properties of Determinants:: 11 22 II NNVivek SinghNo ratings yet
- 5.4 - EigendecompositionDocument2 pages5.4 - EigendecompositionHabib MradNo ratings yet
- 13.limits and Derivatives - Eca712a0 0562 42fb 82cf A07d9dbea472Document1 page13.limits and Derivatives - Eca712a0 0562 42fb 82cf A07d9dbea472dollyhitesh9548No ratings yet
- Macro Theory110 Assignment 5Document8 pagesMacro Theory110 Assignment 5Greco S50No ratings yet
- Solutions Part I - Logistic Regression Backpropagation With A Single Training ExampleDocument6 pagesSolutions Part I - Logistic Regression Backpropagation With A Single Training ExamplePatrick O'RourkeNo ratings yet
- Kinematics in Two Dimensions: Projectile MotionDocument26 pagesKinematics in Two Dimensions: Projectile MotionTakudzwa MiltonNo ratings yet
- Classical Mechanics More On Vectors: Prof. N. Harnew University of Oxford MT 2016Document14 pagesClassical Mechanics More On Vectors: Prof. N. Harnew University of Oxford MT 2016Diego ForeroNo ratings yet
- LA Make Up Assignment-1Document3 pagesLA Make Up Assignment-1Kevin ThawNo ratings yet
- Good Luck!: Massachusetts Institute of TechnologyDocument8 pagesGood Luck!: Massachusetts Institute of TechnologyMuller YeneNo ratings yet
- Recursive Doubling EquationsDocument7 pagesRecursive Doubling EquationsSK TamilanNo ratings yet
- Formula GivenDocument1 pageFormula GivenkornNo ratings yet
- 5.line Surface Volume IntegralsDocument5 pages5.line Surface Volume IntegralsBipanjit SinghNo ratings yet
- Motion in A Straight Line Short Notes Prayas JEE 2 0 2024Document3 pagesMotion in A Straight Line Short Notes Prayas JEE 2 0 2024Shubham KumarNo ratings yet
- p1200 Lecture2 PDFDocument32 pagesp1200 Lecture2 PDFTakudzwa MiltonNo ratings yet
- Cabras Ark Jeremy C. Ex 5Document3 pagesCabras Ark Jeremy C. Ex 5jevocab12No ratings yet
- LAG ProblemSheet3Document2 pagesLAG ProblemSheet3Dominic Wynes-DevlinNo ratings yet
- 02 - Single Component SystemsDocument4 pages02 - Single Component SystemsBen PowersNo ratings yet
- Ques Ans After Lecture 15Document10 pagesQues Ans After Lecture 15Farhan Hussain Ali RanaNo ratings yet
- Classical Mechanics QuizDocument4 pagesClassical Mechanics QuizeveryoneMD100% (3)
- Algebra Semana 6Document3 pagesAlgebra Semana 6Rocio Berrospi MezaNo ratings yet
- Department of Mathematics: Indian Institute of Technology, BombayDocument16 pagesDepartment of Mathematics: Indian Institute of Technology, BombayMridul ChhipaNo ratings yet
- DynamicsDocument141 pagesDynamicsGrace NgomaNo ratings yet
- Additional Topics in Integration: 6.1 Integration by Parts Integral TablesDocument101 pagesAdditional Topics in Integration: 6.1 Integration by Parts Integral TablesMarkNo ratings yet
- Formulario de Cálculo DiferencialDocument1 pageFormulario de Cálculo DiferencialAlberto MansonNo ratings yet
- Exact 3d Navier Stokes Solutions For Benchmarking PDFDocument7 pagesExact 3d Navier Stokes Solutions For Benchmarking PDFlefriyekh achrafNo ratings yet
- Kinematics: Motion of A Particle in One and Two DimensionsDocument23 pagesKinematics: Motion of A Particle in One and Two DimensionsJimmy LauNo ratings yet
- AP Calculus BC 2010 Scoring Guidelines Form B: The College BoardDocument7 pagesAP Calculus BC 2010 Scoring Guidelines Form B: The College BoardMr. PopoNo ratings yet
- Homework1 Solution PDFDocument4 pagesHomework1 Solution PDFDominikNo ratings yet
- March 2ndDocument53 pagesMarch 2ndRucille RamlalNo ratings yet
- Chapter 4. Gauss-Markov ModelDocument20 pagesChapter 4. Gauss-Markov ModelHông HoaNo ratings yet
- 10.2: Kinematics of Rotational Motion: Learning ObjectivesDocument6 pages10.2: Kinematics of Rotational Motion: Learning ObjectivesRein manzanoNo ratings yet
- Lahat NG Problem Solving... (Ito Na Yun)Document4 pagesLahat NG Problem Solving... (Ito Na Yun)Juan Dela CruzNo ratings yet
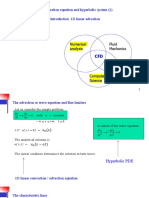
- The Advection Equation and Hyperbolic System (1) Introduction: 1D Linear AdvectionDocument17 pagesThe Advection Equation and Hyperbolic System (1) Introduction: 1D Linear Advection刘伟轩No ratings yet
- Chapter 04Document39 pagesChapter 04Roger Antony Crespo FernandezNo ratings yet
- MATH1551-WE01 Additional MaterialDocument2 pagesMATH1551-WE01 Additional MaterialNyashah FelixNo ratings yet
- Quiz3 2015 SolutionsDocument8 pagesQuiz3 2015 SolutionsGerald RattichNo ratings yet
- Hopf Bifurcation For FlowsDocument5 pagesHopf Bifurcation For FlowsKyostaa MNo ratings yet
- Finite Volume Method For One DimensionalDocument26 pagesFinite Volume Method For One Dimensionalscience1990No ratings yet
- T FT T FT T T T T FT TDocument3 pagesT FT T FT T T T T FT TsummerNo ratings yet
- Introduction To Complex Analysis Priestley SolutionsDocument16 pagesIntroduction To Complex Analysis Priestley SolutionsOrhan AtayNo ratings yet
- Motion in A Straight Line: Distance Versus DisplacementDocument3 pagesMotion in A Straight Line: Distance Versus Displacementkaransharma.123462No ratings yet
- Chapter 4: Fluids Kinematics: Velocity and Description MethodsDocument21 pagesChapter 4: Fluids Kinematics: Velocity and Description MethodsADIL BAHNo ratings yet
- Rectilinear Kinematics Erratic Motion PDFDocument28 pagesRectilinear Kinematics Erratic Motion PDFJubillee MagsinoNo ratings yet
- Solution For Chapter 4 Differential Flow PDFDocument24 pagesSolution For Chapter 4 Differential Flow PDFBowo Yuli PrasetyoNo ratings yet
- VEC VAR ModelsDocument16 pagesVEC VAR ModelsNurul AriffahNo ratings yet
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Linear Acceleration Method November 5 2014 MacDocument3 pagesLinear Acceleration Method November 5 2014 MacAzeemuddin Gulam MohammedNo ratings yet
- Damping and Damping Mechanisms: A Common Phenomenon in Structure's Life Is The Influence of Dynamic Loads. Under TheDocument4 pagesDamping and Damping Mechanisms: A Common Phenomenon in Structure's Life Is The Influence of Dynamic Loads. Under TheAzeemuddin Gulam MohammedNo ratings yet
- DE009 Office Concrete Mix Designs - Datum ReviewedDocument45 pagesDE009 Office Concrete Mix Designs - Datum ReviewedAzeemuddin Gulam MohammedNo ratings yet
- DE011 of-055113-1.0-SD-Stair 1 Level B3 To L3 - 5G - Datum ReviewedDocument66 pagesDE011 of-055113-1.0-SD-Stair 1 Level B3 To L3 - 5G - Datum ReviewedAzeemuddin Gulam MohammedNo ratings yet
- DE013 Of-05 5113-3.0-SD-Stair - Engineering Room B124 Level B1Document35 pagesDE013 Of-05 5113-3.0-SD-Stair - Engineering Room B124 Level B1Azeemuddin Gulam MohammedNo ratings yet
- MT - Office Structural CA SetDocument55 pagesMT - Office Structural CA SetAzeemuddin Gulam MohammedNo ratings yet
- DE008 of - Mechanical Yard Pier Reinforcement - Shop Drawings - Datum ReviewedDocument3 pagesDE008 of - Mechanical Yard Pier Reinforcement - Shop Drawings - Datum ReviewedAzeemuddin Gulam MohammedNo ratings yet
- DE014 19058.00 Hines Maple Terrace 2 of Drill Pier Qualifications 2021-08-20Document2 pagesDE014 19058.00 Hines Maple Terrace 2 of Drill Pier Qualifications 2021-08-20Azeemuddin Gulam MohammedNo ratings yet
- DE015 of-055113-2.0-SD-Stair 2 Level B1 To L5Document52 pagesDE015 of-055113-2.0-SD-Stair 2 Level B1 To L5Azeemuddin Gulam MohammedNo ratings yet
- DE010 of-053123-1.0-P-Vulcraft Joist and Deck Plans - Datum ReviewedDocument9 pagesDE010 of-053123-1.0-P-Vulcraft Joist and Deck Plans - Datum ReviewedAzeemuddin Gulam MohammedNo ratings yet
- NPWHC Guidance Revised 11 2009Document36 pagesNPWHC Guidance Revised 11 2009Azeemuddin Gulam MohammedNo ratings yet
- 2019 LEED Green Associate Candidate Handbook PDFDocument15 pages2019 LEED Green Associate Candidate Handbook PDFAzeemuddin Gulam MohammedNo ratings yet
- Boyd Floor Plans PDFDocument2 pagesBoyd Floor Plans PDFAzeemuddin Gulam MohammedNo ratings yet
- 300+ TOP MACHINE DESIGN Multiple Choice Questions and Answers PDFDocument36 pages300+ TOP MACHINE DESIGN Multiple Choice Questions and Answers PDFBiswajeet Nayak100% (1)
- Creative Mechanism DesignDocument56 pagesCreative Mechanism DesignDibakar SenNo ratings yet
- Rotation (Grotto)Document7 pagesRotation (Grotto)Chandru ANo ratings yet
- Aerodynamics For Engineering Students 6th Edition Houghton Solutions ManualDocument17 pagesAerodynamics For Engineering Students 6th Edition Houghton Solutions ManualKristyCampbelldxef100% (47)
- Physics PracticalDocument7 pagesPhysics PracticalankurNo ratings yet
- Moment of Forces WorksheetDocument4 pagesMoment of Forces WorksheetjessicaNo ratings yet
- Centrifugal Compressor Case StudyDocument13 pagesCentrifugal Compressor Case Studysqualljavier612No ratings yet
- Work Sheet - 1 Name of The Student: - Class:-10 Sec - Academic YearDocument4 pagesWork Sheet - 1 Name of The Student: - Class:-10 Sec - Academic YearunniNo ratings yet
- Review of Cylinder Blockvalve Plate Interface in ADocument24 pagesReview of Cylinder Blockvalve Plate Interface in Adaominhthongb2No ratings yet
- RHS SectionsDocument2 pagesRHS SectionsBza ZaBugNo ratings yet
- Clase 1 - Thermodynamic OverviewDocument21 pagesClase 1 - Thermodynamic OverviewAlex Marin JimenezNo ratings yet
- L2C1 MEC420 1D Kinematics of Particle FS2 PDFDocument30 pagesL2C1 MEC420 1D Kinematics of Particle FS2 PDFMuhammad Danial Hakim Bin JohariNo ratings yet
- Mechanical Engineering-Fluid Mechanics Important MCQDocument32 pagesMechanical Engineering-Fluid Mechanics Important MCQHarshal bansodeNo ratings yet
- Physics Formulae and Data Sheet Stage 3 2015Document4 pagesPhysics Formulae and Data Sheet Stage 3 2015Ang Yu LongNo ratings yet
- Polar Moment of Inertia, Polar Section Modulus Properties of Common Shapes - Engineers EdgeDocument4 pagesPolar Moment of Inertia, Polar Section Modulus Properties of Common Shapes - Engineers EdgeJethro RubiaNo ratings yet
- 201B Concept ThermoDocument3 pages201B Concept ThermoMrsriyansyahNo ratings yet
- Do Not Use Tables in Appendix A or B, Unless Stated OtherwiseDocument2 pagesDo Not Use Tables in Appendix A or B, Unless Stated Otherwisesamala sonuNo ratings yet
- Computer-Aided Analysis of Mechanical Systems PDFDocument388 pagesComputer-Aided Analysis of Mechanical Systems PDFnbritomarNo ratings yet
- Cive327 Fluid Mechanics and Hydraulics Assignment No. 4Document9 pagesCive327 Fluid Mechanics and Hydraulics Assignment No. 4Hajar BaarabeNo ratings yet
- Sachpazis - Raft Foundation Design For Typical 2 Storey House Example - BS8110 - PART 1 - 1997Document5 pagesSachpazis - Raft Foundation Design For Typical 2 Storey House Example - BS8110 - PART 1 - 1997mushroom0320No ratings yet
- Vibrations of Cantilever BeamsDocument9 pagesVibrations of Cantilever BeamsPeti KovácsNo ratings yet
- Relationship by Idriss (1991)Document3 pagesRelationship by Idriss (1991)mauricioNo ratings yet
- Development of Lightweight SteelDocument6 pagesDevelopment of Lightweight SteelJA55EENo ratings yet
- PHY01 Q2 Exam Set A PDFDocument6 pagesPHY01 Q2 Exam Set A PDFMonville RedNo ratings yet
- Gas AbsorptionDocument2 pagesGas AbsorptionMichelle MenciasNo ratings yet




































































































Download as pdf or txt
You might also like
- Worksheet VelocityDocument1 pageWorksheet Velocityanon_78301203367% (3)
- Complete Answers - Physics Form 5 TBDocument36 pagesComplete Answers - Physics Form 5 TBAlexandra Chieng80% (5)
- The Matrix Exponential (With Exercises) by Dan Klain Corrections and Comments Are WelcomeDocument8 pagesThe Matrix Exponential (With Exercises) by Dan Klain Corrections and Comments Are Welcomeabcdfr2No ratings yet
- Propagation of EM WaveDocument43 pagesPropagation of EM WaveVipul GargNo ratings yet
- Individual Assignment 5Document3 pagesIndividual Assignment 5Sirak Masresha0% (1)
- Concept Map of Big Bang TheoryDocument1 pageConcept Map of Big Bang Theorybelgacac396744% (9)
- 70 - ProblemsDocument14 pages70 - ProblemsDon Joseph Rene Omandac100% (1)
- Linear Acceleration Method November 5 2014 MacDocument3 pagesLinear Acceleration Method November 5 2014 MacAzeemuddin Gulam MohammedNo ratings yet
- Linear TransformationDocument42 pagesLinear TransformationBOAMPONG DENNISNo ratings yet
- 6 - L-10 (DK) (Pe) ( (Ee) Nptel)Document1 page6 - L-10 (DK) (Pe) ( (Ee) Nptel)GagneNo ratings yet
- Volume 1 No. 2 Pp. 112-122 (2013) C: Transmuted Exponentiated Exponential DistributionDocument11 pagesVolume 1 No. 2 Pp. 112-122 (2013) C: Transmuted Exponentiated Exponential DistributionWilson Caimanque Sede VallenarNo ratings yet
- Unitary and Hermitian MatricesDocument8 pagesUnitary and Hermitian MatricesJo PopscNo ratings yet
- Soln 6dDocument5 pagesSoln 6dOliverSpurgeonNo ratings yet
- Rayleigh Drag EquationDocument5 pagesRayleigh Drag EquationDr. LawlisNo ratings yet
- AERO455 Assignment 00Document6 pagesAERO455 Assignment 00christian rowsellNo ratings yet
- C&DE Unitwise FormulaeDocument22 pagesC&DE Unitwise FormulaeLalit jadhavNo ratings yet
- Relativity 2Document7 pagesRelativity 2Ayorinde T TundeNo ratings yet
- Dynamics - Lesson 11& 12Document11 pagesDynamics - Lesson 11& 12Vimukthi LakshanNo ratings yet
- The Properties of Determinants:: 11 22 II NNDocument15 pagesThe Properties of Determinants:: 11 22 II NNVivek SinghNo ratings yet
- 5.4 - EigendecompositionDocument2 pages5.4 - EigendecompositionHabib MradNo ratings yet
- 13.limits and Derivatives - Eca712a0 0562 42fb 82cf A07d9dbea472Document1 page13.limits and Derivatives - Eca712a0 0562 42fb 82cf A07d9dbea472dollyhitesh9548No ratings yet
- Macro Theory110 Assignment 5Document8 pagesMacro Theory110 Assignment 5Greco S50No ratings yet
- Solutions Part I - Logistic Regression Backpropagation With A Single Training ExampleDocument6 pagesSolutions Part I - Logistic Regression Backpropagation With A Single Training ExamplePatrick O'RourkeNo ratings yet
- Kinematics in Two Dimensions: Projectile MotionDocument26 pagesKinematics in Two Dimensions: Projectile MotionTakudzwa MiltonNo ratings yet
- Classical Mechanics More On Vectors: Prof. N. Harnew University of Oxford MT 2016Document14 pagesClassical Mechanics More On Vectors: Prof. N. Harnew University of Oxford MT 2016Diego ForeroNo ratings yet
- LA Make Up Assignment-1Document3 pagesLA Make Up Assignment-1Kevin ThawNo ratings yet
- Good Luck!: Massachusetts Institute of TechnologyDocument8 pagesGood Luck!: Massachusetts Institute of TechnologyMuller YeneNo ratings yet
- Recursive Doubling EquationsDocument7 pagesRecursive Doubling EquationsSK TamilanNo ratings yet
- Formula GivenDocument1 pageFormula GivenkornNo ratings yet
- 5.line Surface Volume IntegralsDocument5 pages5.line Surface Volume IntegralsBipanjit SinghNo ratings yet
- Motion in A Straight Line Short Notes Prayas JEE 2 0 2024Document3 pagesMotion in A Straight Line Short Notes Prayas JEE 2 0 2024Shubham KumarNo ratings yet
- p1200 Lecture2 PDFDocument32 pagesp1200 Lecture2 PDFTakudzwa MiltonNo ratings yet
- Cabras Ark Jeremy C. Ex 5Document3 pagesCabras Ark Jeremy C. Ex 5jevocab12No ratings yet
- LAG ProblemSheet3Document2 pagesLAG ProblemSheet3Dominic Wynes-DevlinNo ratings yet
- 02 - Single Component SystemsDocument4 pages02 - Single Component SystemsBen PowersNo ratings yet
- Ques Ans After Lecture 15Document10 pagesQues Ans After Lecture 15Farhan Hussain Ali RanaNo ratings yet
- Classical Mechanics QuizDocument4 pagesClassical Mechanics QuizeveryoneMD100% (3)
- Algebra Semana 6Document3 pagesAlgebra Semana 6Rocio Berrospi MezaNo ratings yet
- Department of Mathematics: Indian Institute of Technology, BombayDocument16 pagesDepartment of Mathematics: Indian Institute of Technology, BombayMridul ChhipaNo ratings yet
- DynamicsDocument141 pagesDynamicsGrace NgomaNo ratings yet
- Additional Topics in Integration: 6.1 Integration by Parts Integral TablesDocument101 pagesAdditional Topics in Integration: 6.1 Integration by Parts Integral TablesMarkNo ratings yet
- Formulario de Cálculo DiferencialDocument1 pageFormulario de Cálculo DiferencialAlberto MansonNo ratings yet
- Exact 3d Navier Stokes Solutions For Benchmarking PDFDocument7 pagesExact 3d Navier Stokes Solutions For Benchmarking PDFlefriyekh achrafNo ratings yet
- Kinematics: Motion of A Particle in One and Two DimensionsDocument23 pagesKinematics: Motion of A Particle in One and Two DimensionsJimmy LauNo ratings yet
- AP Calculus BC 2010 Scoring Guidelines Form B: The College BoardDocument7 pagesAP Calculus BC 2010 Scoring Guidelines Form B: The College BoardMr. PopoNo ratings yet
- Homework1 Solution PDFDocument4 pagesHomework1 Solution PDFDominikNo ratings yet
- March 2ndDocument53 pagesMarch 2ndRucille RamlalNo ratings yet
- Chapter 4. Gauss-Markov ModelDocument20 pagesChapter 4. Gauss-Markov ModelHông HoaNo ratings yet
- 10.2: Kinematics of Rotational Motion: Learning ObjectivesDocument6 pages10.2: Kinematics of Rotational Motion: Learning ObjectivesRein manzanoNo ratings yet
- Lahat NG Problem Solving... (Ito Na Yun)Document4 pagesLahat NG Problem Solving... (Ito Na Yun)Juan Dela CruzNo ratings yet
- The Advection Equation and Hyperbolic System (1) Introduction: 1D Linear AdvectionDocument17 pagesThe Advection Equation and Hyperbolic System (1) Introduction: 1D Linear Advection刘伟轩No ratings yet
- Chapter 04Document39 pagesChapter 04Roger Antony Crespo FernandezNo ratings yet
- MATH1551-WE01 Additional MaterialDocument2 pagesMATH1551-WE01 Additional MaterialNyashah FelixNo ratings yet
- Quiz3 2015 SolutionsDocument8 pagesQuiz3 2015 SolutionsGerald RattichNo ratings yet
- Hopf Bifurcation For FlowsDocument5 pagesHopf Bifurcation For FlowsKyostaa MNo ratings yet
- Finite Volume Method For One DimensionalDocument26 pagesFinite Volume Method For One Dimensionalscience1990No ratings yet
- T FT T FT T T T T FT TDocument3 pagesT FT T FT T T T T FT TsummerNo ratings yet
- Introduction To Complex Analysis Priestley SolutionsDocument16 pagesIntroduction To Complex Analysis Priestley SolutionsOrhan AtayNo ratings yet
- Motion in A Straight Line: Distance Versus DisplacementDocument3 pagesMotion in A Straight Line: Distance Versus Displacementkaransharma.123462No ratings yet
- Chapter 4: Fluids Kinematics: Velocity and Description MethodsDocument21 pagesChapter 4: Fluids Kinematics: Velocity and Description MethodsADIL BAHNo ratings yet
- Rectilinear Kinematics Erratic Motion PDFDocument28 pagesRectilinear Kinematics Erratic Motion PDFJubillee MagsinoNo ratings yet
- Solution For Chapter 4 Differential Flow PDFDocument24 pagesSolution For Chapter 4 Differential Flow PDFBowo Yuli PrasetyoNo ratings yet
- VEC VAR ModelsDocument16 pagesVEC VAR ModelsNurul AriffahNo ratings yet
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- Linear Acceleration Method November 5 2014 MacDocument3 pagesLinear Acceleration Method November 5 2014 MacAzeemuddin Gulam MohammedNo ratings yet
- Damping and Damping Mechanisms: A Common Phenomenon in Structure's Life Is The Influence of Dynamic Loads. Under TheDocument4 pagesDamping and Damping Mechanisms: A Common Phenomenon in Structure's Life Is The Influence of Dynamic Loads. Under TheAzeemuddin Gulam MohammedNo ratings yet
- DE009 Office Concrete Mix Designs - Datum ReviewedDocument45 pagesDE009 Office Concrete Mix Designs - Datum ReviewedAzeemuddin Gulam MohammedNo ratings yet
- DE011 of-055113-1.0-SD-Stair 1 Level B3 To L3 - 5G - Datum ReviewedDocument66 pagesDE011 of-055113-1.0-SD-Stair 1 Level B3 To L3 - 5G - Datum ReviewedAzeemuddin Gulam MohammedNo ratings yet
- DE013 Of-05 5113-3.0-SD-Stair - Engineering Room B124 Level B1Document35 pagesDE013 Of-05 5113-3.0-SD-Stair - Engineering Room B124 Level B1Azeemuddin Gulam MohammedNo ratings yet
- MT - Office Structural CA SetDocument55 pagesMT - Office Structural CA SetAzeemuddin Gulam MohammedNo ratings yet
- DE008 of - Mechanical Yard Pier Reinforcement - Shop Drawings - Datum ReviewedDocument3 pagesDE008 of - Mechanical Yard Pier Reinforcement - Shop Drawings - Datum ReviewedAzeemuddin Gulam MohammedNo ratings yet
- DE014 19058.00 Hines Maple Terrace 2 of Drill Pier Qualifications 2021-08-20Document2 pagesDE014 19058.00 Hines Maple Terrace 2 of Drill Pier Qualifications 2021-08-20Azeemuddin Gulam MohammedNo ratings yet
- DE015 of-055113-2.0-SD-Stair 2 Level B1 To L5Document52 pagesDE015 of-055113-2.0-SD-Stair 2 Level B1 To L5Azeemuddin Gulam MohammedNo ratings yet
- DE010 of-053123-1.0-P-Vulcraft Joist and Deck Plans - Datum ReviewedDocument9 pagesDE010 of-053123-1.0-P-Vulcraft Joist and Deck Plans - Datum ReviewedAzeemuddin Gulam MohammedNo ratings yet
- NPWHC Guidance Revised 11 2009Document36 pagesNPWHC Guidance Revised 11 2009Azeemuddin Gulam MohammedNo ratings yet
- 2019 LEED Green Associate Candidate Handbook PDFDocument15 pages2019 LEED Green Associate Candidate Handbook PDFAzeemuddin Gulam MohammedNo ratings yet
- Boyd Floor Plans PDFDocument2 pagesBoyd Floor Plans PDFAzeemuddin Gulam MohammedNo ratings yet
- 300+ TOP MACHINE DESIGN Multiple Choice Questions and Answers PDFDocument36 pages300+ TOP MACHINE DESIGN Multiple Choice Questions and Answers PDFBiswajeet Nayak100% (1)
- Creative Mechanism DesignDocument56 pagesCreative Mechanism DesignDibakar SenNo ratings yet
- Rotation (Grotto)Document7 pagesRotation (Grotto)Chandru ANo ratings yet
- Aerodynamics For Engineering Students 6th Edition Houghton Solutions ManualDocument17 pagesAerodynamics For Engineering Students 6th Edition Houghton Solutions ManualKristyCampbelldxef100% (47)
- Physics PracticalDocument7 pagesPhysics PracticalankurNo ratings yet
- Moment of Forces WorksheetDocument4 pagesMoment of Forces WorksheetjessicaNo ratings yet
- Centrifugal Compressor Case StudyDocument13 pagesCentrifugal Compressor Case Studysqualljavier612No ratings yet
- Work Sheet - 1 Name of The Student: - Class:-10 Sec - Academic YearDocument4 pagesWork Sheet - 1 Name of The Student: - Class:-10 Sec - Academic YearunniNo ratings yet
- Review of Cylinder Blockvalve Plate Interface in ADocument24 pagesReview of Cylinder Blockvalve Plate Interface in Adaominhthongb2No ratings yet
- RHS SectionsDocument2 pagesRHS SectionsBza ZaBugNo ratings yet
- Clase 1 - Thermodynamic OverviewDocument21 pagesClase 1 - Thermodynamic OverviewAlex Marin JimenezNo ratings yet
- L2C1 MEC420 1D Kinematics of Particle FS2 PDFDocument30 pagesL2C1 MEC420 1D Kinematics of Particle FS2 PDFMuhammad Danial Hakim Bin JohariNo ratings yet
- Mechanical Engineering-Fluid Mechanics Important MCQDocument32 pagesMechanical Engineering-Fluid Mechanics Important MCQHarshal bansodeNo ratings yet
- Physics Formulae and Data Sheet Stage 3 2015Document4 pagesPhysics Formulae and Data Sheet Stage 3 2015Ang Yu LongNo ratings yet
- Polar Moment of Inertia, Polar Section Modulus Properties of Common Shapes - Engineers EdgeDocument4 pagesPolar Moment of Inertia, Polar Section Modulus Properties of Common Shapes - Engineers EdgeJethro RubiaNo ratings yet
- 201B Concept ThermoDocument3 pages201B Concept ThermoMrsriyansyahNo ratings yet
- Do Not Use Tables in Appendix A or B, Unless Stated OtherwiseDocument2 pagesDo Not Use Tables in Appendix A or B, Unless Stated Otherwisesamala sonuNo ratings yet
- Computer-Aided Analysis of Mechanical Systems PDFDocument388 pagesComputer-Aided Analysis of Mechanical Systems PDFnbritomarNo ratings yet
- Cive327 Fluid Mechanics and Hydraulics Assignment No. 4Document9 pagesCive327 Fluid Mechanics and Hydraulics Assignment No. 4Hajar BaarabeNo ratings yet
- Sachpazis - Raft Foundation Design For Typical 2 Storey House Example - BS8110 - PART 1 - 1997Document5 pagesSachpazis - Raft Foundation Design For Typical 2 Storey House Example - BS8110 - PART 1 - 1997mushroom0320No ratings yet
- Vibrations of Cantilever BeamsDocument9 pagesVibrations of Cantilever BeamsPeti KovácsNo ratings yet
- Relationship by Idriss (1991)Document3 pagesRelationship by Idriss (1991)mauricioNo ratings yet
- Development of Lightweight SteelDocument6 pagesDevelopment of Lightweight SteelJA55EENo ratings yet
- PHY01 Q2 Exam Set A PDFDocument6 pagesPHY01 Q2 Exam Set A PDFMonville RedNo ratings yet
- Gas AbsorptionDocument2 pagesGas AbsorptionMichelle MenciasNo ratings yet