Download as pdf or txt
You might also like
- 1st Grade Envision Math 2Document7 pages1st Grade Envision Math 2api-51171643550% (2)
- Radio Propagation For Modern Wireless Systems 0130263737Document272 pagesRadio Propagation For Modern Wireless Systems 0130263737Clive MangwiroNo ratings yet
- Mobile Network Optimization: A Guide for 2G and 3G Mobile Network OptimizationFrom EverandMobile Network Optimization: A Guide for 2G and 3G Mobile Network OptimizationRating: 3.5 out of 5 stars3.5/5 (3)
- Concise Guide to OTN optical transport networksFrom EverandConcise Guide to OTN optical transport networksRating: 4 out of 5 stars4/5 (2)
- Case Study: Cellular NetworkDocument6 pagesCase Study: Cellular Networkrohank87No ratings yet
- Essential 4G Guide: Learn 4G Wireless In One DayFrom EverandEssential 4G Guide: Learn 4G Wireless In One DayRating: 4.5 out of 5 stars4.5/5 (12)
- Patrick Meyer Reliability Understanding Statistics 2010Document160 pagesPatrick Meyer Reliability Understanding Statistics 2010jcgueinj100% (1)
- Wireless Communication: 1) Transmission ModesDocument8 pagesWireless Communication: 1) Transmission ModesWasim WaseemNo ratings yet
- Tdma, FdmaDocument26 pagesTdma, Fdmasarab1111No ratings yet
- BT0086: Mobile Computing - AssignmentDocument6 pagesBT0086: Mobile Computing - AssignmentPawan Mall100% (1)
- 2g Drive AnalysisDocument26 pages2g Drive AnalysisshripalNo ratings yet
- Mobile Computing Synopsis UNIT-1: Generations of Wireless Mobile SystemsDocument25 pagesMobile Computing Synopsis UNIT-1: Generations of Wireless Mobile SystemsNuthanKumarReddyNo ratings yet
- Cellular Network - WikipediaDocument71 pagesCellular Network - Wikipediasakinayasin75No ratings yet
- EC1016 WN NotesDocument97 pagesEC1016 WN NotesbeslinNo ratings yet
- Chapter 5-7Document25 pagesChapter 5-7Temesgen100% (1)
- Wireless Mobile CommunicationsDocument170 pagesWireless Mobile CommunicationsSangeetha BajanthriNo ratings yet
- Cellular Network - Wikipedia PDFDocument57 pagesCellular Network - Wikipedia PDFNawaf A. BalatukayNo ratings yet
- Unit-4 NotesDocument81 pagesUnit-4 Notesjavidinaug77No ratings yet
- Communication System Lecture 6-2 PDFDocument9 pagesCommunication System Lecture 6-2 PDFmiro jasimNo ratings yet
- Mobile Communications 2nd Ed. by Schiller WWW - SolutionmanualDocument43 pagesMobile Communications 2nd Ed. by Schiller WWW - SolutionmanualNguyen Minh0% (1)
- Merging Wireless Networks and PSTDocument13 pagesMerging Wireless Networks and PSTTadesse BitewNo ratings yet
- How Mobile Phone Networks WorkDocument6 pagesHow Mobile Phone Networks WorkHardeep SinghNo ratings yet
- Mobile Train Radio CommunicationDocument18 pagesMobile Train Radio Communicationapi-3798769100% (7)
- Mobile JammerDocument12 pagesMobile JammerDeepa VarmaNo ratings yet
- Umts Quick GuideDocument52 pagesUmts Quick GuideSreeram SNo ratings yet
- MOBILE TRAIN RADIO COMMUNICATION DocumentationDocument18 pagesMOBILE TRAIN RADIO COMMUNICATION Documentationmonica_1248100% (7)
- Chapter 1: IntroductionDocument42 pagesChapter 1: IntroductionmanushaNo ratings yet
- Mobile TelecommunicationDocument79 pagesMobile Telecommunicationteguia donatienNo ratings yet
- Carrier Over Interference What Is It and Why Does It Matter?Document3 pagesCarrier Over Interference What Is It and Why Does It Matter?kuadronNo ratings yet
- TowersDocument30 pagesTowersadityasmartiNo ratings yet
- Cell NetworkDocument12 pagesCell NetworkAidan MonaghanNo ratings yet
- Unit I Introduction To Cellular Mobile System 1.1.1. Conventional Mobile Telephone SystemsDocument14 pagesUnit I Introduction To Cellular Mobile System 1.1.1. Conventional Mobile Telephone SystemsGurkirat SinghNo ratings yet
- Cdma - A Revolutionary Technology: Ch. Poornima S. ShravaniDocument10 pagesCdma - A Revolutionary Technology: Ch. Poornima S. ShravaniAnnapurna SowmyaNo ratings yet
- Feni University: Assignment No - 01 Cellular Mobile CommunicationDocument26 pagesFeni University: Assignment No - 01 Cellular Mobile CommunicationMd Al-amin FahimNo ratings yet
- Cellular Mobile Radio Systems (Husni Hammuda) 1997Document211 pagesCellular Mobile Radio Systems (Husni Hammuda) 1997Ольга КалмыковаNo ratings yet
- MCS - Cheat Sheet - T1Document10 pagesMCS - Cheat Sheet - T1Katta Revanth ReddyNo ratings yet
- Ec T62 Wireless Communication: Unit I: Services and Technical ChallengesDocument15 pagesEc T62 Wireless Communication: Unit I: Services and Technical Challengesvignesh vickyNo ratings yet
- A Review of Antenna Array and Its Application in Mobile CommunicationDocument8 pagesA Review of Antenna Array and Its Application in Mobile CommunicationRavindra KumarNo ratings yet
- Mimowhitepaperrevb FinalDocument14 pagesMimowhitepaperrevb Finaljulian_binevNo ratings yet
- Chapter OneDocument66 pagesChapter OnerajeshkecNo ratings yet
- Introduction To Cellular Communications 1. Mobile Communications PrinciplesDocument49 pagesIntroduction To Cellular Communications 1. Mobile Communications Principleskalyan.427656No ratings yet
- Introduction To Wireless Systems-CH 3Document99 pagesIntroduction To Wireless Systems-CH 3George maksoudNo ratings yet
- Co and Adjacent Channel Interference Evaluation in GSM and UMTS Cellular NetworksDocument4 pagesCo and Adjacent Channel Interference Evaluation in GSM and UMTS Cellular NetworksDehbbor DauduNo ratings yet
- Cellular TechnologyDocument21 pagesCellular TechnologyjolieprincesseishimweNo ratings yet
- MCC NotesDocument159 pagesMCC NotesUDAYA ALLANINo ratings yet
- Cellular Network: From Wikipedia, The Free EncyclopediaDocument11 pagesCellular Network: From Wikipedia, The Free Encyclopediabinsaad20No ratings yet
- Mobile Communications - An Overview: S.R. Subramanya and Byung K. YiDocument5 pagesMobile Communications - An Overview: S.R. Subramanya and Byung K. YiIrene Monserrat Torres HdezNo ratings yet
- Cellular and Mobile Communications: Subject Code: A70434 Ece - Iv-I Sem Jntuh-R15Document306 pagesCellular and Mobile Communications: Subject Code: A70434 Ece - Iv-I Sem Jntuh-R15YashwantSaiKishoreNo ratings yet
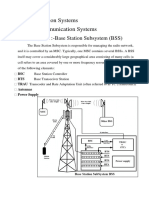
- Concept: Transceiver Cell Sites Base Transceiver StationsDocument4 pagesConcept: Transceiver Cell Sites Base Transceiver StationsArain RazzNo ratings yet
- The International Telecommunications Regime: Domestic Preferences And Regime ChangeFrom EverandThe International Telecommunications Regime: Domestic Preferences And Regime ChangeNo ratings yet
- How to Use the General Mobile Radio Service for Canadian Business ApplicationsFrom EverandHow to Use the General Mobile Radio Service for Canadian Business ApplicationsNo ratings yet
- Third Generation CDMA Systems for Enhanced Data ServicesFrom EverandThird Generation CDMA Systems for Enhanced Data ServicesRating: 5 out of 5 stars5/5 (1)
- Full-Duplex Communications for Future Wireless NetworksFrom EverandFull-Duplex Communications for Future Wireless NetworksHirley AlvesNo ratings yet
- Advances in Analog and RF IC Design for Wireless Communication SystemsFrom EverandAdvances in Analog and RF IC Design for Wireless Communication SystemsGabriele ManganaroRating: 1 out of 5 stars1/5 (1)
- OQAM/FBMC for Future Wireless Communications: Principles, Technologies and ApplicationsFrom EverandOQAM/FBMC for Future Wireless Communications: Principles, Technologies and ApplicationsRating: 3.5 out of 5 stars3.5/5 (3)
- Modeling and Dimensioning of Mobile Wireless Networks: From GSM to LTEFrom EverandModeling and Dimensioning of Mobile Wireless Networks: From GSM to LTENo ratings yet
- 5G and Beyond Wireless Transport Technologies: Enabling Backhaul, Midhaul, and FronthaulFrom Everand5G and Beyond Wireless Transport Technologies: Enabling Backhaul, Midhaul, and FronthaulNo ratings yet
- Optimum Frequency Planning For Efficient Channel UtilizationDocument6 pagesOptimum Frequency Planning For Efficient Channel UtilizationHnaif LatiNo ratings yet
- GSM HistoryDocument337 pagesGSM HistoryHnaif LatiNo ratings yet
- GSM Network OptimizationDocument34 pagesGSM Network OptimizationHnaif LatiNo ratings yet
- WCDMA RAN Design - TrainingDocument58 pagesWCDMA RAN Design - TrainingHnaif LatiNo ratings yet
- Ericsson 3G Network Audit & Param ModificationDocument17 pagesEricsson 3G Network Audit & Param ModificationHnaif LatiNo ratings yet
- Logcat MainDocument21 pagesLogcat MainTrisno OchaNo ratings yet
- Pemeriksaan Nervus FasialisDocument25 pagesPemeriksaan Nervus FasialisAldy BimaNo ratings yet
- Iqac - Report 2011 12Document91 pagesIqac - Report 2011 12Prashant SinghNo ratings yet
- Bisphosphonate and Dental Implant (Power Point) (FINAL)Document30 pagesBisphosphonate and Dental Implant (Power Point) (FINAL)Shehab RehanyNo ratings yet
- Mie Theory Calculator User's Manual: Ivan CharamisinauDocument8 pagesMie Theory Calculator User's Manual: Ivan CharamisinauSteven AdamskiNo ratings yet
- Banking Assessment 10Document10 pagesBanking Assessment 10AMARJEET SINGHNo ratings yet
- International Law of The Sea SyllabusDocument7 pagesInternational Law of The Sea SyllabusTony George PuthucherrilNo ratings yet
- MY23 Sportage PHEV ENGDocument5 pagesMY23 Sportage PHEV ENGSteve MastropoleNo ratings yet
- Edu301 Midterm Current File MCQDocument3 pagesEdu301 Midterm Current File MCQhaidarvu01No ratings yet
- Amee Guide No. 34Document8 pagesAmee Guide No. 34achciaNo ratings yet
- A-32 - Ab CommunicationDocument4 pagesA-32 - Ab CommunicationEnteng NiezNo ratings yet
- Lesson 11 An Earnest ParableDocument3 pagesLesson 11 An Earnest ParableKing Cajayon33% (3)
- Design Process - BhavyaaDocument47 pagesDesign Process - Bhavyaasahay designNo ratings yet
- Psychological StatisticsDocument6 pagesPsychological StatisticsMarielle Francisco0% (1)
- List of Drug Manifacturing UnitsDocument276 pagesList of Drug Manifacturing UnitsKusumNo ratings yet
- Chapter 4 MacroeconomicsDocument11 pagesChapter 4 MacroeconomicsEveNo ratings yet
- VT ReportDocument36 pagesVT ReportafNo ratings yet
- Ila ResumeDocument2 pagesIla ResumeAravind SampathNo ratings yet
- History of PantajaliDocument18 pagesHistory of PantajaliChristianNo ratings yet
- Division of Northern Samar Curriculum Implementation Division (Cid)Document8 pagesDivision of Northern Samar Curriculum Implementation Division (Cid)gener r. rodelasNo ratings yet
- Disrupsi e HealthDocument13 pagesDisrupsi e Healthkristina dewiNo ratings yet
- Alfred Jarry and PostmodernismDocument48 pagesAlfred Jarry and PostmodernismSonnyDysNo ratings yet
- Organic Chemistry ChartsDocument84 pagesOrganic Chemistry ChartsPRIYANSHU KUMARNo ratings yet
- Lab REport Number Who Knows What (Mitosis)Document12 pagesLab REport Number Who Knows What (Mitosis)Michelle SeywaldNo ratings yet
- Detailed Advt CRP SPL XIIIDocument46 pagesDetailed Advt CRP SPL XIIIpuneet kumarNo ratings yet
- EAPP Q1 Week8 Final 5 PagesDocument5 pagesEAPP Q1 Week8 Final 5 PagesMa Kristina Rigor75% (4)
- Correctional AdministrationDocument9 pagesCorrectional AdministrationEmmanuel BuanNo ratings yet
- Procedural Guidelines: A.TREDS LimitedDocument41 pagesProcedural Guidelines: A.TREDS LimitedKiran Kumar KaginelliNo ratings yet