
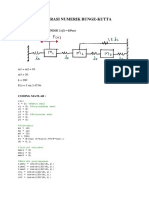
X X X F (X) +G (X) U: Ejercicio 3
X X X F (X) +G (X) U: Ejercicio 3
You might also like
- Sizing of Amine AbsorberDocument7 pagesSizing of Amine AbsorberGracylla RoseNo ratings yet
- German Monograph For CannabisDocument7 pagesGerman Monograph For CannabisAngel Cvetanov100% (1)
- Matlab Tutorial 1Document29 pagesMatlab Tutorial 1KuAdenan KuSyakranNo ratings yet
- Pubdoc 3 7935 844Document6 pagesPubdoc 3 7935 844AbbasNo ratings yet
- Simulink Time 1 Simple Oscillator: M y + C y + Ky 0Document16 pagesSimulink Time 1 Simple Oscillator: M y + C y + Ky 0amuumaNo ratings yet
- Perhitungan GordingDocument6 pagesPerhitungan Gordingtaufikkurrahman6286No ratings yet
- Revised Conveyor Belt CalDocument66 pagesRevised Conveyor Belt CalAndres Jr Quiambao100% (1)
- Bab Ii Perencanaan Atap/Kap 1. Data PerencanaanDocument12 pagesBab Ii Perencanaan Atap/Kap 1. Data PerencanaanJufry Tak TergantieNo ratings yet
- BAB II Perhitungan AtapDocument16 pagesBAB II Perhitungan AtapnovisuckNo ratings yet
- Dyn AssignmentDocument8 pagesDyn AssignmentTekle AschuNo ratings yet
- Gording & Kuda2Document18 pagesGording & Kuda2Haqie SipilNo ratings yet
- Riza MatlabDocument13 pagesRiza Matlabmuhammedriza27No ratings yet
- Tugas Besar Struktur Baja Ii: Kelompok 5Document14 pagesTugas Besar Struktur Baja Ii: Kelompok 5ADE WinanjarNo ratings yet
- 2 BAB II AtapDocument48 pages2 BAB II AtapAzTaurRivaiNo ratings yet
- ME 563 Mechanical Vibrations Lecture #2: Newton-Euler Laws (Derivation of Equations of Motion)Document14 pagesME 563 Mechanical Vibrations Lecture #2: Newton-Euler Laws (Derivation of Equations of Motion)nils4586No ratings yet
- Simulating A Suspension Fork Movement by Using Simulink or ScilabDocument6 pagesSimulating A Suspension Fork Movement by Using Simulink or ScilabJaokNo ratings yet
- UnitsDocument6 pagesUnitsIbrahim HaiderNo ratings yet
- Example Problems PDFDocument28 pagesExample Problems PDFSheikh MisbahNo ratings yet
- Belt Tension Steady State CalculationDocument1 pageBelt Tension Steady State CalculationMary Antoinette C. MadoloraNo ratings yet
- Dadi Kayu-QU 2010Document23 pagesDadi Kayu-QU 2010Hermawan Septian AdittyaNo ratings yet
- Problem 1.11Document2 pagesProblem 1.11lbro7291No ratings yet
- Cost MatrixDocument2 pagesCost MatrixsajjadmirNo ratings yet
- FALLSEM2013-14 CP1806 30-Oct-2013 RM01 II OptimalControl UploadedDocument10 pagesFALLSEM2013-14 CP1806 30-Oct-2013 RM01 II OptimalControl UploadedRajat Kumar SinghNo ratings yet
- Perhitungan AtapDocument31 pagesPerhitungan AtapHanifNo ratings yet
- Lab-4 ControlsDocument14 pagesLab-4 Controlsmaryamjavaid028No ratings yet
- Cam Dynamics PDFDocument10 pagesCam Dynamics PDFLakshman Prakash100% (1)
- Çelik Kafes ProjeDocument13 pagesÇelik Kafes ProjeEnder KılınçNo ratings yet
- AC Lab SimulationDocument35 pagesAC Lab SimulationKoteswaraRaoBNo ratings yet
- University of The East: Samson Road, Caloocan CityDocument8 pagesUniversity of The East: Samson Road, Caloocan CityJayvee NeridaNo ratings yet
- Matlab SolutionDocument20 pagesMatlab SolutionAngel Ngo100% (1)
- Final Transport ProjectDocument11 pagesFinal Transport Projectapi-457071846No ratings yet
- Individual Pitch Control InventoryDocument31 pagesIndividual Pitch Control Inventory7senNo ratings yet
- Multivariable Feedback Control: Andrea GuidiDocument13 pagesMultivariable Feedback Control: Andrea GuidiAndrea GuidiNo ratings yet
- Assignment - 2 - Updated Solution - ME354ADocument13 pagesAssignment - 2 - Updated Solution - ME354Adagani ranisamyukthaNo ratings yet
- Simple Oscillator (Oscillator) : Yddot Ydot y 1 S 1 S ScopeDocument15 pagesSimple Oscillator (Oscillator) : Yddot Ydot y 1 S 1 S ScopeFadi DaouNo ratings yet
- Perencanaan Gording: TraktangDocument4 pagesPerencanaan Gording: TraktangMoch Imam MuflihNo ratings yet
- Deterministic Continuous Time Optimal Control and The Hamilton-Jacobi-Bellman EquationDocument7 pagesDeterministic Continuous Time Optimal Control and The Hamilton-Jacobi-Bellman EquationAbdesselem BoulkrouneNo ratings yet
- Guide Rail Calculation For ElevatorsDocument24 pagesGuide Rail Calculation For ElevatorssalahNo ratings yet
- Linearization Assignment W-Solution SaDocument7 pagesLinearization Assignment W-Solution SaFikri Al Ayubi0% (1)
- The Optimal Control Chart ProceduřeDocument10 pagesThe Optimal Control Chart ProceduřeAnonymous FfIxH2o9No ratings yet
- Spectral Analysis of Wave MotionDocument6 pagesSpectral Analysis of Wave MotiontainarodovalhoNo ratings yet
- Example Problems Basics of Space Flight Rocket PropulsionDocument32 pagesExample Problems Basics of Space Flight Rocket PropulsionsalmanNo ratings yet
- Geng 4Document6 pagesGeng 4justdakshNo ratings yet
- 1 Circular Motion PDFDocument6 pages1 Circular Motion PDFdgkulkarniNo ratings yet
- Development of An Automated Storage/Retrieval System: Chung Tan Lam, Nguyen Tuong Long, Phan Hoang Phung, Le Hoai QuocDocument18 pagesDevelopment of An Automated Storage/Retrieval System: Chung Tan Lam, Nguyen Tuong Long, Phan Hoang Phung, Le Hoai QuoctieuboilangthangkyNo ratings yet
- Aplicaciones de La Integral DobleDocument91 pagesAplicaciones de La Integral DobleCristian Andres Fuentes CarbajalNo ratings yet
- hw2 SolDocument11 pageshw2 SolSaied Aly SalamahNo ratings yet
- Perhitungan Panjang BatangDocument8 pagesPerhitungan Panjang Batangferdian10No ratings yet
- Formulae For Phys 230 Exam 2: I. ElasticityDocument2 pagesFormulae For Phys 230 Exam 2: I. ElasticityReizuSeharuNo ratings yet
- Problems Applied To Chemical Engineering.Document7 pagesProblems Applied To Chemical Engineering.ScribdTranslationsNo ratings yet
- Example From CH 1 To CH 6Document21 pagesExample From CH 1 To CH 6SteveNo ratings yet
- On Some Properties of Humbert'S Polynomials: G. V - MilovanovicDocument5 pagesOn Some Properties of Humbert'S Polynomials: G. V - MilovanovicCharlie PinedoNo ratings yet
- Midterm 2006 SolDocument4 pagesMidterm 2006 SolRaul AcevedoNo ratings yet
- More On Monte Carlo Methods in Finance: 1 Simulation of SdesDocument2 pagesMore On Monte Carlo Methods in Finance: 1 Simulation of SdesowltbigNo ratings yet
- Integrasi Numerik Runge-Kutta: Struktur Mdof Kondisi 1 (Ω = 0.9Ω)Document4 pagesIntegrasi Numerik Runge-Kutta: Struktur Mdof Kondisi 1 (Ω = 0.9Ω)Willy_Chandra2No ratings yet
- Dsplab 2Document10 pagesDsplab 2Jacob PopcornsNo ratings yet
- Dynamics GLA-2a Sept2017Document27 pagesDynamics GLA-2a Sept2017Izzone PhysireNo ratings yet
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportFrom EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportNo ratings yet
- Large Platform Skid Steer & Compact Track LoadersDocument8 pagesLarge Platform Skid Steer & Compact Track LoadersWilliam Avila AguilarNo ratings yet
- Willia M Ávila: Digitally Signed by William Ávila Date: 2022.09.02 21:27:02 - 05'00'Document1 pageWillia M Ávila: Digitally Signed by William Ávila Date: 2022.09.02 21:27:02 - 05'00'William Avila AguilarNo ratings yet
- The Heil Co.: - WeightDocument2 pagesThe Heil Co.: - WeightWilliam Avila AguilarNo ratings yet
- Drawing Size B Revision - Eco # PT17018: The Heil CoDocument2 pagesDrawing Size B Revision - Eco # PT17018: The Heil CoWilliam Avila AguilarNo ratings yet
- Carcasaver 1Document1 pageCarcasaver 1William Avila AguilarNo ratings yet
- Designed by Checked by Approved by Date DateDocument1 pageDesigned by Checked by Approved by Date DateWilliam Avila AguilarNo ratings yet
- Carcasamotor 1 Ver 1Document1 pageCarcasamotor 1 Ver 1William Avila AguilarNo ratings yet
- MECANISMO1Document1 pageMECANISMO1William Avila AguilarNo ratings yet
- PIEZA1MEC2Document1 pagePIEZA1MEC2William Avila AguilarNo ratings yet
- Mecanismo2 1Document1 pageMecanismo2 1William Avila AguilarNo ratings yet
- Tutorial 2 QsDocument4 pagesTutorial 2 Qsfarrin92No ratings yet
- 100 Practical Exercises in Music Composition 0190057246 9780190057244 Compress 3Document45 pages100 Practical Exercises in Music Composition 0190057246 9780190057244 Compress 3Lê Thanh XuânNo ratings yet
- SPH SWRO 1,5 M3 Jam BPK Ardi Makasar-DikonversiDocument6 pagesSPH SWRO 1,5 M3 Jam BPK Ardi Makasar-DikonversiRyanWennoNo ratings yet
- Ship Framing SystemDocument10 pagesShip Framing SystemgksahaNo ratings yet
- Hyperreal: A Hypermedia Model For Mixed Reality: Luis Romero, Nuno CorreiaDocument9 pagesHyperreal: A Hypermedia Model For Mixed Reality: Luis Romero, Nuno CorreiaVideaux LondonNo ratings yet
- The Double Integration MethodDocument9 pagesThe Double Integration MethodskyhellNo ratings yet
- Chapter - 44Document5 pagesChapter - 44tito cuadrosNo ratings yet
- Experiment 4Document28 pagesExperiment 4nellyNo ratings yet
- 02.11 Kepler Kingdom (Honors) Faris MohamedainDocument3 pages02.11 Kepler Kingdom (Honors) Faris MohamedainFaris MohamedainNo ratings yet
- TMS RamSan620 DataSheetDocument2 pagesTMS RamSan620 DataSheetNaga Prasad PonnaNo ratings yet
- 1.concepts of Growth & DevelopmentDocument107 pages1.concepts of Growth & DevelopmentYuvashreeNo ratings yet
- Determination of Length Change of Concrete Due To Alkali-Silica ReactionDocument6 pagesDetermination of Length Change of Concrete Due To Alkali-Silica Reactionrizwan ghafoorNo ratings yet
- Type CO Circuit Opening Overcurrent Relay - Autores Varios - Editorial ABB - 1984Document24 pagesType CO Circuit Opening Overcurrent Relay - Autores Varios - Editorial ABB - 1984Manuel OrtegaNo ratings yet
- Piano - Grade 3: Digital Grades: Technical WorkDocument1 pagePiano - Grade 3: Digital Grades: Technical WorkOpera Music CenterNo ratings yet
- Physics 101: Fall 2003 Session - General InformationDocument4 pagesPhysics 101: Fall 2003 Session - General InformationMAnohar KumarNo ratings yet
- Leica TM6100A Brochure enDocument6 pagesLeica TM6100A Brochure enCarlos CostaNo ratings yet
- Longjia Exactly BrugermanualDocument56 pagesLongjia Exactly BrugermanualvladomiljNo ratings yet
- Phenol Removal using Pulsation Bubble Column with Inverse Fluidization airlift Loop Reactor (البحث رقم4)Document8 pagesPhenol Removal using Pulsation Bubble Column with Inverse Fluidization airlift Loop Reactor (البحث رقم4)ali abdulrahman al-ezziNo ratings yet
- Elastic Inelastic CollisionsDocument3 pagesElastic Inelastic Collisionssaud ahmedNo ratings yet
- Tek TVS600Series UM 070991600Document398 pagesTek TVS600Series UM 070991600Lorraine PriceNo ratings yet
- Lycopodiella Cernua (L.)Document11 pagesLycopodiella Cernua (L.)Nguyen BinhNo ratings yet
- Classifying Hand-Written Digits Using Neural Network: A Project Report OnDocument19 pagesClassifying Hand-Written Digits Using Neural Network: A Project Report OnNihir YadavNo ratings yet
- Intro:: SCI 403 J. Marinay Physics IDocument11 pagesIntro:: SCI 403 J. Marinay Physics IKRISTELLE GEM CABANIGNo ratings yet
- Chapter 2. Homogeneous SemiconductorsDocument49 pagesChapter 2. Homogeneous Semiconductorsfourier76No ratings yet
- 4QUEUEDocument36 pages4QUEUEsupreetNo ratings yet
- Response of Second Order System and Response To Step ForceDocument50 pagesResponse of Second Order System and Response To Step Forceedmar peregrinNo ratings yet
- Optimal Boiler Size and Its Relation To Seasonal EfficiencyDocument45 pagesOptimal Boiler Size and Its Relation To Seasonal EfficiencybobbobNo ratings yet
- GAIL (India) Limited: Bawana-Nangal Pipeline ProjectDocument42 pagesGAIL (India) Limited: Bawana-Nangal Pipeline ProjectAnonymous oVRvsdWzfBNo ratings yet

































































































Download as docx, pdf, or txt
You might also like
- Sizing of Amine AbsorberDocument7 pagesSizing of Amine AbsorberGracylla RoseNo ratings yet
- German Monograph For CannabisDocument7 pagesGerman Monograph For CannabisAngel Cvetanov100% (1)
- Matlab Tutorial 1Document29 pagesMatlab Tutorial 1KuAdenan KuSyakranNo ratings yet
- Pubdoc 3 7935 844Document6 pagesPubdoc 3 7935 844AbbasNo ratings yet
- Simulink Time 1 Simple Oscillator: M y + C y + Ky 0Document16 pagesSimulink Time 1 Simple Oscillator: M y + C y + Ky 0amuumaNo ratings yet
- Perhitungan GordingDocument6 pagesPerhitungan Gordingtaufikkurrahman6286No ratings yet
- Revised Conveyor Belt CalDocument66 pagesRevised Conveyor Belt CalAndres Jr Quiambao100% (1)
- Bab Ii Perencanaan Atap/Kap 1. Data PerencanaanDocument12 pagesBab Ii Perencanaan Atap/Kap 1. Data PerencanaanJufry Tak TergantieNo ratings yet
- BAB II Perhitungan AtapDocument16 pagesBAB II Perhitungan AtapnovisuckNo ratings yet
- Dyn AssignmentDocument8 pagesDyn AssignmentTekle AschuNo ratings yet
- Gording & Kuda2Document18 pagesGording & Kuda2Haqie SipilNo ratings yet
- Riza MatlabDocument13 pagesRiza Matlabmuhammedriza27No ratings yet
- Tugas Besar Struktur Baja Ii: Kelompok 5Document14 pagesTugas Besar Struktur Baja Ii: Kelompok 5ADE WinanjarNo ratings yet
- 2 BAB II AtapDocument48 pages2 BAB II AtapAzTaurRivaiNo ratings yet
- ME 563 Mechanical Vibrations Lecture #2: Newton-Euler Laws (Derivation of Equations of Motion)Document14 pagesME 563 Mechanical Vibrations Lecture #2: Newton-Euler Laws (Derivation of Equations of Motion)nils4586No ratings yet
- Simulating A Suspension Fork Movement by Using Simulink or ScilabDocument6 pagesSimulating A Suspension Fork Movement by Using Simulink or ScilabJaokNo ratings yet
- UnitsDocument6 pagesUnitsIbrahim HaiderNo ratings yet
- Example Problems PDFDocument28 pagesExample Problems PDFSheikh MisbahNo ratings yet
- Belt Tension Steady State CalculationDocument1 pageBelt Tension Steady State CalculationMary Antoinette C. MadoloraNo ratings yet
- Dadi Kayu-QU 2010Document23 pagesDadi Kayu-QU 2010Hermawan Septian AdittyaNo ratings yet
- Problem 1.11Document2 pagesProblem 1.11lbro7291No ratings yet
- Cost MatrixDocument2 pagesCost MatrixsajjadmirNo ratings yet
- FALLSEM2013-14 CP1806 30-Oct-2013 RM01 II OptimalControl UploadedDocument10 pagesFALLSEM2013-14 CP1806 30-Oct-2013 RM01 II OptimalControl UploadedRajat Kumar SinghNo ratings yet
- Perhitungan AtapDocument31 pagesPerhitungan AtapHanifNo ratings yet
- Lab-4 ControlsDocument14 pagesLab-4 Controlsmaryamjavaid028No ratings yet
- Cam Dynamics PDFDocument10 pagesCam Dynamics PDFLakshman Prakash100% (1)
- Çelik Kafes ProjeDocument13 pagesÇelik Kafes ProjeEnder KılınçNo ratings yet
- AC Lab SimulationDocument35 pagesAC Lab SimulationKoteswaraRaoBNo ratings yet
- University of The East: Samson Road, Caloocan CityDocument8 pagesUniversity of The East: Samson Road, Caloocan CityJayvee NeridaNo ratings yet
- Matlab SolutionDocument20 pagesMatlab SolutionAngel Ngo100% (1)
- Final Transport ProjectDocument11 pagesFinal Transport Projectapi-457071846No ratings yet
- Individual Pitch Control InventoryDocument31 pagesIndividual Pitch Control Inventory7senNo ratings yet
- Multivariable Feedback Control: Andrea GuidiDocument13 pagesMultivariable Feedback Control: Andrea GuidiAndrea GuidiNo ratings yet
- Assignment - 2 - Updated Solution - ME354ADocument13 pagesAssignment - 2 - Updated Solution - ME354Adagani ranisamyukthaNo ratings yet
- Simple Oscillator (Oscillator) : Yddot Ydot y 1 S 1 S ScopeDocument15 pagesSimple Oscillator (Oscillator) : Yddot Ydot y 1 S 1 S ScopeFadi DaouNo ratings yet
- Perencanaan Gording: TraktangDocument4 pagesPerencanaan Gording: TraktangMoch Imam MuflihNo ratings yet
- Deterministic Continuous Time Optimal Control and The Hamilton-Jacobi-Bellman EquationDocument7 pagesDeterministic Continuous Time Optimal Control and The Hamilton-Jacobi-Bellman EquationAbdesselem BoulkrouneNo ratings yet
- Guide Rail Calculation For ElevatorsDocument24 pagesGuide Rail Calculation For ElevatorssalahNo ratings yet
- Linearization Assignment W-Solution SaDocument7 pagesLinearization Assignment W-Solution SaFikri Al Ayubi0% (1)
- The Optimal Control Chart ProceduřeDocument10 pagesThe Optimal Control Chart ProceduřeAnonymous FfIxH2o9No ratings yet
- Spectral Analysis of Wave MotionDocument6 pagesSpectral Analysis of Wave MotiontainarodovalhoNo ratings yet
- Example Problems Basics of Space Flight Rocket PropulsionDocument32 pagesExample Problems Basics of Space Flight Rocket PropulsionsalmanNo ratings yet
- Geng 4Document6 pagesGeng 4justdakshNo ratings yet
- 1 Circular Motion PDFDocument6 pages1 Circular Motion PDFdgkulkarniNo ratings yet
- Development of An Automated Storage/Retrieval System: Chung Tan Lam, Nguyen Tuong Long, Phan Hoang Phung, Le Hoai QuocDocument18 pagesDevelopment of An Automated Storage/Retrieval System: Chung Tan Lam, Nguyen Tuong Long, Phan Hoang Phung, Le Hoai QuoctieuboilangthangkyNo ratings yet
- Aplicaciones de La Integral DobleDocument91 pagesAplicaciones de La Integral DobleCristian Andres Fuentes CarbajalNo ratings yet
- hw2 SolDocument11 pageshw2 SolSaied Aly SalamahNo ratings yet
- Perhitungan Panjang BatangDocument8 pagesPerhitungan Panjang Batangferdian10No ratings yet
- Formulae For Phys 230 Exam 2: I. ElasticityDocument2 pagesFormulae For Phys 230 Exam 2: I. ElasticityReizuSeharuNo ratings yet
- Problems Applied To Chemical Engineering.Document7 pagesProblems Applied To Chemical Engineering.ScribdTranslationsNo ratings yet
- Example From CH 1 To CH 6Document21 pagesExample From CH 1 To CH 6SteveNo ratings yet
- On Some Properties of Humbert'S Polynomials: G. V - MilovanovicDocument5 pagesOn Some Properties of Humbert'S Polynomials: G. V - MilovanovicCharlie PinedoNo ratings yet
- Midterm 2006 SolDocument4 pagesMidterm 2006 SolRaul AcevedoNo ratings yet
- More On Monte Carlo Methods in Finance: 1 Simulation of SdesDocument2 pagesMore On Monte Carlo Methods in Finance: 1 Simulation of SdesowltbigNo ratings yet
- Integrasi Numerik Runge-Kutta: Struktur Mdof Kondisi 1 (Ω = 0.9Ω)Document4 pagesIntegrasi Numerik Runge-Kutta: Struktur Mdof Kondisi 1 (Ω = 0.9Ω)Willy_Chandra2No ratings yet
- Dsplab 2Document10 pagesDsplab 2Jacob PopcornsNo ratings yet
- Dynamics GLA-2a Sept2017Document27 pagesDynamics GLA-2a Sept2017Izzone PhysireNo ratings yet
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportFrom EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportNo ratings yet
- Large Platform Skid Steer & Compact Track LoadersDocument8 pagesLarge Platform Skid Steer & Compact Track LoadersWilliam Avila AguilarNo ratings yet
- Willia M Ávila: Digitally Signed by William Ávila Date: 2022.09.02 21:27:02 - 05'00'Document1 pageWillia M Ávila: Digitally Signed by William Ávila Date: 2022.09.02 21:27:02 - 05'00'William Avila AguilarNo ratings yet
- The Heil Co.: - WeightDocument2 pagesThe Heil Co.: - WeightWilliam Avila AguilarNo ratings yet
- Drawing Size B Revision - Eco # PT17018: The Heil CoDocument2 pagesDrawing Size B Revision - Eco # PT17018: The Heil CoWilliam Avila AguilarNo ratings yet
- Carcasaver 1Document1 pageCarcasaver 1William Avila AguilarNo ratings yet
- Designed by Checked by Approved by Date DateDocument1 pageDesigned by Checked by Approved by Date DateWilliam Avila AguilarNo ratings yet
- Carcasamotor 1 Ver 1Document1 pageCarcasamotor 1 Ver 1William Avila AguilarNo ratings yet
- MECANISMO1Document1 pageMECANISMO1William Avila AguilarNo ratings yet
- PIEZA1MEC2Document1 pagePIEZA1MEC2William Avila AguilarNo ratings yet
- Mecanismo2 1Document1 pageMecanismo2 1William Avila AguilarNo ratings yet
- Tutorial 2 QsDocument4 pagesTutorial 2 Qsfarrin92No ratings yet
- 100 Practical Exercises in Music Composition 0190057246 9780190057244 Compress 3Document45 pages100 Practical Exercises in Music Composition 0190057246 9780190057244 Compress 3Lê Thanh XuânNo ratings yet
- SPH SWRO 1,5 M3 Jam BPK Ardi Makasar-DikonversiDocument6 pagesSPH SWRO 1,5 M3 Jam BPK Ardi Makasar-DikonversiRyanWennoNo ratings yet
- Ship Framing SystemDocument10 pagesShip Framing SystemgksahaNo ratings yet
- Hyperreal: A Hypermedia Model For Mixed Reality: Luis Romero, Nuno CorreiaDocument9 pagesHyperreal: A Hypermedia Model For Mixed Reality: Luis Romero, Nuno CorreiaVideaux LondonNo ratings yet
- The Double Integration MethodDocument9 pagesThe Double Integration MethodskyhellNo ratings yet
- Chapter - 44Document5 pagesChapter - 44tito cuadrosNo ratings yet
- Experiment 4Document28 pagesExperiment 4nellyNo ratings yet
- 02.11 Kepler Kingdom (Honors) Faris MohamedainDocument3 pages02.11 Kepler Kingdom (Honors) Faris MohamedainFaris MohamedainNo ratings yet
- TMS RamSan620 DataSheetDocument2 pagesTMS RamSan620 DataSheetNaga Prasad PonnaNo ratings yet
- 1.concepts of Growth & DevelopmentDocument107 pages1.concepts of Growth & DevelopmentYuvashreeNo ratings yet
- Determination of Length Change of Concrete Due To Alkali-Silica ReactionDocument6 pagesDetermination of Length Change of Concrete Due To Alkali-Silica Reactionrizwan ghafoorNo ratings yet
- Type CO Circuit Opening Overcurrent Relay - Autores Varios - Editorial ABB - 1984Document24 pagesType CO Circuit Opening Overcurrent Relay - Autores Varios - Editorial ABB - 1984Manuel OrtegaNo ratings yet
- Piano - Grade 3: Digital Grades: Technical WorkDocument1 pagePiano - Grade 3: Digital Grades: Technical WorkOpera Music CenterNo ratings yet
- Physics 101: Fall 2003 Session - General InformationDocument4 pagesPhysics 101: Fall 2003 Session - General InformationMAnohar KumarNo ratings yet
- Leica TM6100A Brochure enDocument6 pagesLeica TM6100A Brochure enCarlos CostaNo ratings yet
- Longjia Exactly BrugermanualDocument56 pagesLongjia Exactly BrugermanualvladomiljNo ratings yet
- Phenol Removal using Pulsation Bubble Column with Inverse Fluidization airlift Loop Reactor (البحث رقم4)Document8 pagesPhenol Removal using Pulsation Bubble Column with Inverse Fluidization airlift Loop Reactor (البحث رقم4)ali abdulrahman al-ezziNo ratings yet
- Elastic Inelastic CollisionsDocument3 pagesElastic Inelastic Collisionssaud ahmedNo ratings yet
- Tek TVS600Series UM 070991600Document398 pagesTek TVS600Series UM 070991600Lorraine PriceNo ratings yet
- Lycopodiella Cernua (L.)Document11 pagesLycopodiella Cernua (L.)Nguyen BinhNo ratings yet
- Classifying Hand-Written Digits Using Neural Network: A Project Report OnDocument19 pagesClassifying Hand-Written Digits Using Neural Network: A Project Report OnNihir YadavNo ratings yet
- Intro:: SCI 403 J. Marinay Physics IDocument11 pagesIntro:: SCI 403 J. Marinay Physics IKRISTELLE GEM CABANIGNo ratings yet
- Chapter 2. Homogeneous SemiconductorsDocument49 pagesChapter 2. Homogeneous Semiconductorsfourier76No ratings yet
- 4QUEUEDocument36 pages4QUEUEsupreetNo ratings yet
- Response of Second Order System and Response To Step ForceDocument50 pagesResponse of Second Order System and Response To Step Forceedmar peregrinNo ratings yet
- Optimal Boiler Size and Its Relation To Seasonal EfficiencyDocument45 pagesOptimal Boiler Size and Its Relation To Seasonal EfficiencybobbobNo ratings yet
- GAIL (India) Limited: Bawana-Nangal Pipeline ProjectDocument42 pagesGAIL (India) Limited: Bawana-Nangal Pipeline ProjectAnonymous oVRvsdWzfBNo ratings yet