Download as pdf or txt
You might also like
- Apple Supplier ListDocument25 pagesApple Supplier Listdrazenv1No ratings yet
- NiCr MEMS Tactile Sensors Embedded in Polyimide Toward Smart SkinDocument7 pagesNiCr MEMS Tactile Sensors Embedded in Polyimide Toward Smart SkinUsama AwaisNo ratings yet
- Varona 2009Document6 pagesVarona 2009Đức HiếuNo ratings yet
- Interaction Forces During The Sliding of A Water Droplet On A Textured SurfaceDocument4 pagesInteraction Forces During The Sliding of A Water Droplet On A Textured Surfacedemy antonyNo ratings yet
- Hamedi 2012Document5 pagesHamedi 2012Đức HiếuNo ratings yet
- 2004-Michael B. Pritts-Design of An Artificial Muscle Continuum RobotDocument5 pages2004-Michael B. Pritts-Design of An Artificial Muscle Continuum Robotitm.ggwpNo ratings yet
- Surface Micro Machined AccelerometersDocument10 pagesSurface Micro Machined AccelerometersjamsNo ratings yet
- Kim2004 PDFDocument9 pagesKim2004 PDFmeetuNo ratings yet
- Micri GreperDocument27 pagesMicri GreperTerence DengNo ratings yet
- Air-Damped Microresonators With Enhanced Quality FactorDocument10 pagesAir-Damped Microresonators With Enhanced Quality Factorapi-3793067No ratings yet
- Flow Field Investigations and Aerodynamic Characteristics of Artillery ProjectileDocument4 pagesFlow Field Investigations and Aerodynamic Characteristics of Artillery ProjectilediablopapanatasNo ratings yet
- Modelling and Analysis of Flexure Based Compliant MicrogripperDocument9 pagesModelling and Analysis of Flexure Based Compliant MicrogripperMalek SghaierNo ratings yet
- COMPLAS2013-87 - Recent Progress in MicroplaneDocument12 pagesCOMPLAS2013-87 - Recent Progress in Microplanefs jiNo ratings yet
- Damping Ratio Analysis of A Silicon Capacitive Micromechanical AccelerometerDocument11 pagesDamping Ratio Analysis of A Silicon Capacitive Micromechanical AccelerometerFaresNo ratings yet
- V Older 2007Document7 pagesV Older 2007bentalebNo ratings yet
- Design and Experiment For Dual-Mass MEMS Gyroscope Sensing Closed-Loop SystemDocument14 pagesDesign and Experiment For Dual-Mass MEMS Gyroscope Sensing Closed-Loop Systemhaotianhu213No ratings yet
- CFD Analysis For Supersonic Flow Over A Wedge Ijariie5053Document19 pagesCFD Analysis For Supersonic Flow Over A Wedge Ijariie5053Singh Aditya100% (1)
- Design of Mems Based Microcantilever Using Comsol MultiphysicsDocument3 pagesDesign of Mems Based Microcantilever Using Comsol Multiphysicsbasavaraj hagaratagiNo ratings yet
- Castelliz 1974Document8 pagesCastelliz 1974Soledad AceitunoNo ratings yet
- Nonlinear Tensile and Shear Behavior of Macro Fiber Composite ActuatorsDocument9 pagesNonlinear Tensile and Shear Behavior of Macro Fiber Composite ActuatorsRolando d'HellemmesNo ratings yet
- 10.1007@s10825 019 01429 WDocument11 pages10.1007@s10825 019 01429 Wanirudhsanthosh1731No ratings yet
- Andres PaperDocument7 pagesAndres PaperRoque Rubén AndrésNo ratings yet
- System Modeling of MEMS Gyroscopes: Ramyar Rashed and H. MomeniDocument6 pagesSystem Modeling of MEMS Gyroscopes: Ramyar Rashed and H. MomenijitendraNo ratings yet
- Analysis and Optimization of A Safety Line Under Dynamic LoadsDocument13 pagesAnalysis and Optimization of A Safety Line Under Dynamic LoadslucasgambiNo ratings yet
- 1139-32 Comparision Spiling Bar Vs Micropiles UmbrellaDocument9 pages1139-32 Comparision Spiling Bar Vs Micropiles UmbrellaOscar Solari JorieNo ratings yet
- Tubos de CalorDocument7 pagesTubos de CalorChristo AcostaNo ratings yet
- Optimization of Plugs For The Diversion Tunnels of DamsDocument17 pagesOptimization of Plugs For The Diversion Tunnels of Damsengr_usman04No ratings yet
- A Review On Actuation and Sensing Techniques For MEMS-based MicrogrippersDocument14 pagesA Review On Actuation and Sensing Techniques For MEMS-based MicrogrippersraghulthoppaeNo ratings yet
- Article AnalyticalModelingAndSimulatioDocument10 pagesArticle AnalyticalModelingAndSimulatiopratyushaNo ratings yet
- 2022-Kermouche - Plastic Flow Under Shear-Compression at The Micron Scale-Application On Amorphous Silica at High Strain RateDocument7 pages2022-Kermouche - Plastic Flow Under Shear-Compression at The Micron Scale-Application On Amorphous Silica at High Strain RateDavid Hernández EscobarNo ratings yet
- Energy Absorption of Safety Nets in Building ConstructionDocument9 pagesEnergy Absorption of Safety Nets in Building ConstructionJorge ChavezNo ratings yet
- Harmonic Balance of Turbine Blades With Friction DampersDocument8 pagesHarmonic Balance of Turbine Blades With Friction DampersVairasivam Karisna KumarNo ratings yet
- ECE 6401: MEMS Design & Micromachining: Working Principle of MicrosystemsDocument17 pagesECE 6401: MEMS Design & Micromachining: Working Principle of MicrosystemsAbcNo ratings yet
- Xiaoyang Lu, Yaru Wang, Xiaoxiao Wang, Hao Zhang, Silu XieDocument5 pagesXiaoyang Lu, Yaru Wang, Xiaoxiao Wang, Hao Zhang, Silu Xiesawmag123No ratings yet
- Paper Sigeps MFZ-2 PDFDocument15 pagesPaper Sigeps MFZ-2 PDFEvgeny ShavelzonNo ratings yet
- Unit 3 (C) Pressure MeasurementDocument17 pagesUnit 3 (C) Pressure MeasurementFuzail AhmadNo ratings yet
- 2.-Microsystem Design FundamentalsDocument28 pages2.-Microsystem Design FundamentalsAlexander Martínez PasekNo ratings yet
- Micro ActuatorsDocument10 pagesMicro ActuatorsEyad A. FeilatNo ratings yet
- Senzor - Balavalad 2017 Ijca 913554Document9 pagesSenzor - Balavalad 2017 Ijca 913554Andrijana KuharNo ratings yet
- An Investigation of Electrowettingbased MicroactuationDocument10 pagesAn Investigation of Electrowettingbased MicroactuationTeferiNo ratings yet
- Fracture Strength and Fatigue of Polysilicon Determined by A Novel Thermal ActuatorDocument7 pagesFracture Strength and Fatigue of Polysilicon Determined by A Novel Thermal ActuatorIhsanNo ratings yet
- 00650128Document9 pages00650128alenNo ratings yet
- Chapter-1: 1.1 Overview of MemsDocument14 pagesChapter-1: 1.1 Overview of MemsKritesh YadavNo ratings yet
- A Novel Technique For Mechanical Characterization of Thin Elastomeric MembraneDocument5 pagesA Novel Technique For Mechanical Characterization of Thin Elastomeric MembraneJavier SantibañezNo ratings yet
- Large Scale Atomistic SimulationDocument10 pagesLarge Scale Atomistic SimulationHiran ChathurangaNo ratings yet
- FEM Simulation of Novel Thermal Microactuator: B.G.Sheeparamatti, J.S.Kadadevarmath, and M.S. HebbalDocument3 pagesFEM Simulation of Novel Thermal Microactuator: B.G.Sheeparamatti, J.S.Kadadevarmath, and M.S. HebbalPedro VargasNo ratings yet
- Contents PlatesDocument14 pagesContents PlatesAleksa MarjanovićNo ratings yet
- Design Study For An Electro-Thermally Actuator For MicromanipulationDocument8 pagesDesign Study For An Electro-Thermally Actuator For MicromanipulationIonescu ViorelNo ratings yet
- Riopipeline2019 1104 201906031512fm 3811 00 Formato PDFDocument11 pagesRiopipeline2019 1104 201906031512fm 3811 00 Formato PDFMarcelo Varejão CasarinNo ratings yet
- Vibration Control of Flexible Structures Using Semi-Active Mount: Experimental InvestigationDocument16 pagesVibration Control of Flexible Structures Using Semi-Active Mount: Experimental InvestigationElvis CarneiroNo ratings yet
- Control of A Decelerating Boundary Layer. Part 1: Optimization of Passive Vortex GeneratorsDocument11 pagesControl of A Decelerating Boundary Layer. Part 1: Optimization of Passive Vortex GeneratorsFauzi Hussin LeoNo ratings yet
- Optimization of Dimples in Microchannel Heat Sink With Impinging Jets - Part B: The Influences of Dimple Height and ArrangementDocument10 pagesOptimization of Dimples in Microchannel Heat Sink With Impinging Jets - Part B: The Influences of Dimple Height and ArrangementdfvgdfvdfvdsvsfvsasdadsNo ratings yet
- Shear Band Formation in Granular Materials: A Micromechanical ApproachDocument7 pagesShear Band Formation in Granular Materials: A Micromechanical ApproachgeoanagoNo ratings yet
- Buckling and Postbuckling Analysis of A CFRP Stiffened Panel For ADocument7 pagesBuckling and Postbuckling Analysis of A CFRP Stiffened Panel For AOSCARDELTANo ratings yet
- 2 Vikky Kumhar VSRDIJMCAPE 5555 Research Paper 5 5 May 2015Document7 pages2 Vikky Kumhar VSRDIJMCAPE 5555 Research Paper 5 5 May 2015Kiet Truong AnhNo ratings yet
- Ain Shams Engineering Journal: Magdy Saeed Hussin, Ashraf Ghorab, Mohamed A. El-SamanoudyDocument14 pagesAin Shams Engineering Journal: Magdy Saeed Hussin, Ashraf Ghorab, Mohamed A. El-SamanoudyJeison GarzonNo ratings yet
- The Development of A New Piezoresistive Pressure Sensor For Low PressuresDocument10 pagesThe Development of A New Piezoresistive Pressure Sensor For Low PressuresAmirhossein RajabiNo ratings yet
- Gupta PaperDocument6 pagesGupta PaperRnSi 0506No ratings yet
- Linear-Stiffness Rotary MEMS Stage: Journal of Microelectromechanical Systems June 2012Document4 pagesLinear-Stiffness Rotary MEMS Stage: Journal of Microelectromechanical Systems June 2012aufar syehanNo ratings yet
- Monostable Dynamic Analysis of Microbeam-Based Resonators Via An Improved One Degree of Freedom ModelDocument19 pagesMonostable Dynamic Analysis of Microbeam-Based Resonators Via An Improved One Degree of Freedom ModelValentina Florez GiraldoNo ratings yet
- Composition of A Paint CoatingDocument7 pagesComposition of A Paint CoatingJefferson ChavarríaNo ratings yet
- Art 1Document11 pagesArt 1Jefferson ChavarríaNo ratings yet
- WO 2010/121846 Al: Intellectual (10) InternationalDocument18 pagesWO 2010/121846 Al: Intellectual (10) InternationalJefferson ChavarríaNo ratings yet
- US7431364Document7 pagesUS7431364Jefferson ChavarríaNo ratings yet
- Ele 146Document161 pagesEle 146Muhaned MustafaNo ratings yet
- Amal Michael Saji AJC16ME023 S7 Me-A Prof. Saju Sebastian: Presented By: GuideDocument23 pagesAmal Michael Saji AJC16ME023 S7 Me-A Prof. Saju Sebastian: Presented By: GuideAMAL MICHAEL SajiNo ratings yet
- CY7C63000 CY7C63001 CY7C63100 CY7C63101 CY7C63200 CY7C63201 Universal Serial Bus MicrocontrollerDocument28 pagesCY7C63000 CY7C63001 CY7C63100 CY7C63101 CY7C63200 CY7C63201 Universal Serial Bus MicrocontrollerMarcelo PerezNo ratings yet
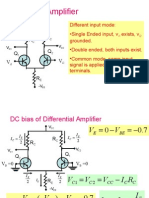
- Differential AmplifierDocument12 pagesDifferential AmplifierSauravAbidRahmanNo ratings yet
- High-Speed Ingaas Pin Photodiodes C30616, C30637, C30617, C30618Document6 pagesHigh-Speed Ingaas Pin Photodiodes C30616, C30637, C30617, C30618jorge luis guevara martinezNo ratings yet
- ID 610C Carver Intro To Motor ControlDocument46 pagesID 610C Carver Intro To Motor Control조용규No ratings yet
- Arduino 8x8 LED Matrix Interface - MAX7219 ICDocument24 pagesArduino 8x8 LED Matrix Interface - MAX7219 ICBhavesh IngaleNo ratings yet
- A Study of PI Controller Based Unified Power Quality ConditionerDocument4 pagesA Study of PI Controller Based Unified Power Quality ConditionerTushar JainNo ratings yet
- CN 6000Document16 pagesCN 6000rahulsubramaniyanNo ratings yet
- Historical Development of ComputersDocument5 pagesHistorical Development of Computersqamarjamalamin20130% (1)
- Experiment No. 5: Half-Wave Rectifier Ece00L-Basic Electronics LaboratoryDocument5 pagesExperiment No. 5: Half-Wave Rectifier Ece00L-Basic Electronics LaboratoryJarome G. OblenaNo ratings yet
- Regulation On SyngenDocument6 pagesRegulation On SyngenRanchida PhuangphisNo ratings yet
- Durag Dust MonitorDocument13 pagesDurag Dust MonitorVivek KumarNo ratings yet
- Overview of Led LightingDocument63 pagesOverview of Led Lightingpcharwood100% (3)
- Simple Lie DetectorDocument2 pagesSimple Lie Detectorsta57No ratings yet
- GGG Sss NotesDocument1 pageGGG Sss NotesJonathan RuverNo ratings yet
- Voltage and Current Laws: Reproduction or Display. 1Document26 pagesVoltage and Current Laws: Reproduction or Display. 1박승현No ratings yet
- Geiger Counter Neon LampDocument3 pagesGeiger Counter Neon LampClaudio Oliveira TavaresNo ratings yet
- S5 ME E & E Lab Manual Final PDFDocument70 pagesS5 ME E & E Lab Manual Final PDFRomid ThomasNo ratings yet
- TZX-Series Diodo ZenerDocument7 pagesTZX-Series Diodo ZenerPedro RodriguezNo ratings yet
- Noise and Its TypesDocument9 pagesNoise and Its Typesnyma ahmdNo ratings yet
- Hydrogen ElectrolysisDocument3 pagesHydrogen ElectrolysismshjNo ratings yet
- Composite Video SignalDocument18 pagesComposite Video SignalGab DimarananNo ratings yet
- Pic 16F676Document133 pagesPic 16F676LuisRodríguezNo ratings yet
- Laboratory No. 15 - Thevenins TheoremDocument5 pagesLaboratory No. 15 - Thevenins TheoremJames Patrick TorresNo ratings yet
- Nu Energy™ Research ArchiveDocument10 pagesNu Energy™ Research ArchiveNashon_AsekaNo ratings yet
- LP8550 High-Efficiency LED Backlight Driver For Notebooks: 1 Features 3 DescriptionDocument49 pagesLP8550 High-Efficiency LED Backlight Driver For Notebooks: 1 Features 3 Descriptionsaom09No ratings yet
- Transformer DesignDocument27 pagesTransformer DesignNitesh BharadwajNo ratings yet