
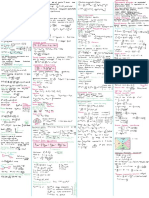
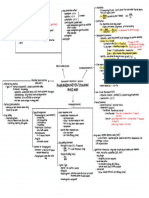
w1m1 Statics
w1m1 Statics
You might also like
- W1M1 Statics NotesDocument2 pagesW1M1 Statics Notesstevie maylaNo ratings yet
- Everything You Need To Memorise - Part 2, Mechanics PDFDocument1 pageEverything You Need To Memorise - Part 2, Mechanics PDFMehak KhanNo ratings yet
- GR Cheat Sehe 8Document2 pagesGR Cheat Sehe 8Sophia VentNo ratings yet
- Waves: Physics WallahDocument4 pagesWaves: Physics Wallahsrijit227No ratings yet
- CRDG - Chapter 5 - Gravitation (S.B.C.S)Document9 pagesCRDG - Chapter 5 - Gravitation (S.B.C.S)chitrarpitasaha1729No ratings yet
- Vestibulares PDFDocument8 pagesVestibulares PDFPedro Henrique BorgesNo ratings yet
- Tarea Ciclos Diesel y OttoDocument5 pagesTarea Ciclos Diesel y Ottoarturobaruch21No ratings yet
- 89+614 Lvup SH.2 of 2Document1 page89+614 Lvup SH.2 of 2Ankur ChauhanNo ratings yet
- Chapter 4Document1 pageChapter 4Shaurya JainNo ratings yet
- Biochemistry TokenDocument11 pagesBiochemistry TokenMuhammad AdnanNo ratings yet
- Physics Reviewer Jusq TabangDocument1 pagePhysics Reviewer Jusq TabangIan DibNo ratings yet
- Linear Systems of Differential Equations NotesDocument12 pagesLinear Systems of Differential Equations NotesRahulNo ratings yet
- ? ????? ???????? JeeDocument1 page? ????? ???????? JeeSougata HalderNo ratings yet
- Arizona School Districts: Leas Eligible For The 2016 Small Rural School Achievement Program (Srsa)Document13 pagesArizona School Districts: Leas Eligible For The 2016 Small Rural School Achievement Program (Srsa)Gerson Tampolino AcostaNo ratings yet
- Motor Induksi 3 FasaDocument1 pageMotor Induksi 3 FasaJustin SitohangNo ratings yet
- Halo HaloDocument2 pagesHalo HalomamigojeminaNo ratings yet
- React Scales PosterDocument1 pageReact Scales PosterFrancesco ManiscalcoNo ratings yet
- Kinda Shizz (Score)Document4 pagesKinda Shizz (Score)madmegdigitalltdNo ratings yet
- Everything You Need To Memorise - Part 2, Core Pure Year 2 PDFDocument1 pageEverything You Need To Memorise - Part 2, Core Pure Year 2 PDFhanasilver96No ratings yet
- Fourier TransformDocument2 pagesFourier TransformMaths Home Work 123No ratings yet
- Vermont School Districts: Leas Eligible For The 2014 Small Rural School Achievement Program (Srsa)Document8 pagesVermont School Districts: Leas Eligible For The 2014 Small Rural School Achievement Program (Srsa)Lori MendezNo ratings yet
- Site Layout FO KIK-CCTV-ARIF - New Rev4Document1 pageSite Layout FO KIK-CCTV-ARIF - New Rev4Adi PriyapurnatamaNo ratings yet
- New Mexico School Districts: Leas Eligible For The 2016 Small Rural School Achievement Program (Srsa)Document4 pagesNew Mexico School Districts: Leas Eligible For The 2016 Small Rural School Achievement Program (Srsa)Gerson Tampolino AcostaNo ratings yet
- Camana: Plano ClaveDocument1 pageCamana: Plano ClaveJohann Nick Flores AparicioNo ratings yet
- Formulaire PHYSDocument2 pagesFormulaire PHYSjadbechara25No ratings yet
- Cheat Sheet 1Document2 pagesCheat Sheet 1Mevlüt YıldırımNo ratings yet
- Rotational MotionDocument2 pagesRotational Motionmrclaudexyz710No ratings yet
- 6502061-พรพรหม พรมพลอยDocument1 page6502061-พรพรหม พรมพลอยxnqt5n8q89No ratings yet
- Handbook of XPS PDFDocument193 pagesHandbook of XPS PDFBernay CifuentesNo ratings yet
- Contactos Auxiliares NSX100FDocument4 pagesContactos Auxiliares NSX100FLeonardoNo ratings yet
- GS DocsDocument1 pageGS Docsar.gsalongaNo ratings yet
- Semi ConductorDocument1 pageSemi Conductorbolero3241No ratings yet
- Agnus Missa Tertia (Haller)Document4 pagesAgnus Missa Tertia (Haller)Coral Jesus DespojadoNo ratings yet
- Chemistry Mind Maps.Document1 pageChemistry Mind Maps.Ajab MookhtiarNo ratings yet
- Formulaire GMRT 1Document1 pageFormulaire GMRT 1martaNo ratings yet
- Master PlanDocument1 pageMaster PlanBerylsom MorrisNo ratings yet
- FFFDocument2 pagesFFFMohamed TalebNo ratings yet
- Delta 1: Localización en El Mapa de ColombiaDocument1 pageDelta 1: Localización en El Mapa de Colombiafull papeleriaNo ratings yet
- LOCALIZACIÓNDocument1 pageLOCALIZACIÓNfull papeleriaNo ratings yet
- Indaaas 115Document1 pageIndaaas 115Vijaypal Singh RathoreNo ratings yet
- Spectrum WhiteDocument1 pageSpectrum WhitethebigfishxNo ratings yet
- React Scales PosterDocument1 pageReact Scales Postercobalt59No ratings yet
- Tema 6Document2 pagesTema 6Marua AbselamNo ratings yet
- 5 Hilux (Cont. Next Page) : Power Source Engine Control (1TR-FE, 2TR-FE)Document4 pages5 Hilux (Cont. Next Page) : Power Source Engine Control (1TR-FE, 2TR-FE)Asd Man100% (2)
- RF and EMC Formulas and Charts: Conversions for 50Ω Environment Antenna Equations www.arworld.usDocument1 pageRF and EMC Formulas and Charts: Conversions for 50Ω Environment Antenna Equations www.arworld.usamirNo ratings yet
- 397 Fishkill Ave - Revised Bid Set - 240227 (Per Add1)Document20 pages397 Fishkill Ave - Revised Bid Set - 240227 (Per Add1)awais.mfbzoneNo ratings yet
- Cinetica Particula 1d 2d 2da Ley NewtonDocument7 pagesCinetica Particula 1d 2d 2da Ley NewtonJordan Castillo FiestasNo ratings yet
- Defect Analysis - Mar 12 Vs Apr 12Document13 pagesDefect Analysis - Mar 12 Vs Apr 12racingspirit80No ratings yet
- Site Dev Phase 2 Lamp Post Connection-ModelDocument1 pageSite Dev Phase 2 Lamp Post Connection-Modeljames cortejosNo ratings yet
- Reach 1A Tentative DrawingDocument3 pagesReach 1A Tentative DrawingTUSHAR RATHODNo ratings yet
- IGCSE Chemistry NotesDocument16 pagesIGCSE Chemistry NotesIbraheem4life officialNo ratings yet
- R_IGCSE Resources | Topical Notes by Chapter for IGCSE Chemistry | Written by VeDocument14 pagesR_IGCSE Resources | Topical Notes by Chapter for IGCSE Chemistry | Written by VeyashikaNo ratings yet
- Mecânica Geral 2Document1 pageMecânica Geral 2Renan QueirozNo ratings yet
- B1 - (05) - R3 - Fourth Floor LayoutDocument1 pageB1 - (05) - R3 - Fourth Floor LayoutBernardo Cuamba JuniorNo ratings yet
- According To ThermodynamicDocument4 pagesAccording To Thermodynamicali madjidNo ratings yet
- Bus Control: AGC VT CSDocument3 pagesBus Control: AGC VT CSTecnico GenioNo ratings yet
- Midas MD-TV29399 Con UOC TMPA8879CSN Diagrama PDFDocument3 pagesMidas MD-TV29399 Con UOC TMPA8879CSN Diagrama PDFOdaliz EspinozaNo ratings yet
- Form R1 - 2 Report On Family StatusDocument1 pageForm R1 - 2 Report On Family StatusOmakoi MalangNo ratings yet
- Can Can From Orphée Aux Enfers Offenbach Piano Sheet MusicDocument2 pagesCan Can From Orphée Aux Enfers Offenbach Piano Sheet MusicPublicDomainSheets80% (5)
- A Detailed Lesson Plan On The Nature and Characteristics of Waves Modified Sept.21, 16Document10 pagesA Detailed Lesson Plan On The Nature and Characteristics of Waves Modified Sept.21, 16Jeiril Divino100% (23)
- LIGHT 7 Es APARENTE MIRASOLDocument8 pagesLIGHT 7 Es APARENTE MIRASOLMirasol Aparente100% (1)
- Physics101-Second Major-152-SolutionDocument9 pagesPhysics101-Second Major-152-SolutionAsrianorNo ratings yet
- Practice Test2 ps150Document3 pagesPractice Test2 ps150Antoine S. NdiayeNo ratings yet
- FRICTIONALDocument13 pagesFRICTIONALCleraNo ratings yet
- DH RepresentationDocument3 pagesDH RepresentationChandni DayakarNo ratings yet
- Gejala GelombangDocument6 pagesGejala GelombangVincent VetterNo ratings yet
- EM76 - Modal Testing Part 1 - Introduction & Impact TestingDocument4 pagesEM76 - Modal Testing Part 1 - Introduction & Impact TestingChad HuntNo ratings yet
- Work, Energy&Power (Nitin M Sir)Document6 pagesWork, Energy&Power (Nitin M Sir)Kenny RuizNo ratings yet
- Formula+data Sheet For Edexcel Ial MathDocument4 pagesFormula+data Sheet For Edexcel Ial Mathlinda heatherNo ratings yet
- Mathematics Extension 2 Assessment Task SbhsDocument8 pagesMathematics Extension 2 Assessment Task SbhsCalvin YaoNo ratings yet
- CAMS - M4 - Manoeuvring Models PDFDocument33 pagesCAMS - M4 - Manoeuvring Models PDFtoshugoNo ratings yet
- Chapter 2 - Ideal Flow Theory PDFDocument51 pagesChapter 2 - Ideal Flow Theory PDFSanthoshinii RamalingamNo ratings yet
- Prob 3 ANS PDFDocument5 pagesProb 3 ANS PDFJames TheeNo ratings yet
- Development of Quantum Mechanics: Earning BjectivesDocument83 pagesDevelopment of Quantum Mechanics: Earning Bjectivesshubham tejaniNo ratings yet
- New 1Document20 pagesNew 1Richard EstradaNo ratings yet
- Slide UT Part 2Document46 pagesSlide UT Part 2Trung Tinh HoNo ratings yet
- Forces and MotionDocument4 pagesForces and MotionMu'iz RahmanNo ratings yet
- AGARDAG323Document251 pagesAGARDAG323Theodoros TriantafyllouNo ratings yet
- R5310304-Kinematics of MachineryDocument4 pagesR5310304-Kinematics of MachinerysivabharathamurthyNo ratings yet
- HtKe (1e) PDFDocument120 pagesHtKe (1e) PDFRajat KaliaNo ratings yet
- Calculus 10th Edition by Anton Bivens Davis ISBN Test BankDocument11 pagesCalculus 10th Edition by Anton Bivens Davis ISBN Test Bankrebecca100% (30)
- Torreti - Bachelard e FenomenotecnicaDocument19 pagesTorreti - Bachelard e FenomenotecnicaGabriel Kafure da RochaNo ratings yet
- 05 Projectile MotionDocument5 pages05 Projectile MotionBass ŌkamiNo ratings yet
- Open Channel FlowDocument161 pagesOpen Channel FlowJuan Hero100% (1)
- Potential Flow PDFDocument8 pagesPotential Flow PDFAsal MortazaviNo ratings yet
- Lesson 3 Phy 1Document20 pagesLesson 3 Phy 1Gen Z LearnersNo ratings yet
- PHYSICS Tut-01 Vectors PDFDocument2 pagesPHYSICS Tut-01 Vectors PDFCharlotte ChamaNo ratings yet
- CEDYNA20 Fixed Axis RotationDocument111 pagesCEDYNA20 Fixed Axis RotationJulius UbanosNo ratings yet
- Solution For Chapter 4 Differential Flow PDFDocument24 pagesSolution For Chapter 4 Differential Flow PDFBowo Yuli PrasetyoNo ratings yet


















































































Download as pdf or txt
You might also like
- W1M1 Statics NotesDocument2 pagesW1M1 Statics Notesstevie maylaNo ratings yet
- Everything You Need To Memorise - Part 2, Mechanics PDFDocument1 pageEverything You Need To Memorise - Part 2, Mechanics PDFMehak KhanNo ratings yet
- GR Cheat Sehe 8Document2 pagesGR Cheat Sehe 8Sophia VentNo ratings yet
- Waves: Physics WallahDocument4 pagesWaves: Physics Wallahsrijit227No ratings yet
- CRDG - Chapter 5 - Gravitation (S.B.C.S)Document9 pagesCRDG - Chapter 5 - Gravitation (S.B.C.S)chitrarpitasaha1729No ratings yet
- Vestibulares PDFDocument8 pagesVestibulares PDFPedro Henrique BorgesNo ratings yet
- Tarea Ciclos Diesel y OttoDocument5 pagesTarea Ciclos Diesel y Ottoarturobaruch21No ratings yet
- 89+614 Lvup SH.2 of 2Document1 page89+614 Lvup SH.2 of 2Ankur ChauhanNo ratings yet
- Chapter 4Document1 pageChapter 4Shaurya JainNo ratings yet
- Biochemistry TokenDocument11 pagesBiochemistry TokenMuhammad AdnanNo ratings yet
- Physics Reviewer Jusq TabangDocument1 pagePhysics Reviewer Jusq TabangIan DibNo ratings yet
- Linear Systems of Differential Equations NotesDocument12 pagesLinear Systems of Differential Equations NotesRahulNo ratings yet
- ? ????? ???????? JeeDocument1 page? ????? ???????? JeeSougata HalderNo ratings yet
- Arizona School Districts: Leas Eligible For The 2016 Small Rural School Achievement Program (Srsa)Document13 pagesArizona School Districts: Leas Eligible For The 2016 Small Rural School Achievement Program (Srsa)Gerson Tampolino AcostaNo ratings yet
- Motor Induksi 3 FasaDocument1 pageMotor Induksi 3 FasaJustin SitohangNo ratings yet
- Halo HaloDocument2 pagesHalo HalomamigojeminaNo ratings yet
- React Scales PosterDocument1 pageReact Scales PosterFrancesco ManiscalcoNo ratings yet
- Kinda Shizz (Score)Document4 pagesKinda Shizz (Score)madmegdigitalltdNo ratings yet
- Everything You Need To Memorise - Part 2, Core Pure Year 2 PDFDocument1 pageEverything You Need To Memorise - Part 2, Core Pure Year 2 PDFhanasilver96No ratings yet
- Fourier TransformDocument2 pagesFourier TransformMaths Home Work 123No ratings yet
- Vermont School Districts: Leas Eligible For The 2014 Small Rural School Achievement Program (Srsa)Document8 pagesVermont School Districts: Leas Eligible For The 2014 Small Rural School Achievement Program (Srsa)Lori MendezNo ratings yet
- Site Layout FO KIK-CCTV-ARIF - New Rev4Document1 pageSite Layout FO KIK-CCTV-ARIF - New Rev4Adi PriyapurnatamaNo ratings yet
- New Mexico School Districts: Leas Eligible For The 2016 Small Rural School Achievement Program (Srsa)Document4 pagesNew Mexico School Districts: Leas Eligible For The 2016 Small Rural School Achievement Program (Srsa)Gerson Tampolino AcostaNo ratings yet
- Camana: Plano ClaveDocument1 pageCamana: Plano ClaveJohann Nick Flores AparicioNo ratings yet
- Formulaire PHYSDocument2 pagesFormulaire PHYSjadbechara25No ratings yet
- Cheat Sheet 1Document2 pagesCheat Sheet 1Mevlüt YıldırımNo ratings yet
- Rotational MotionDocument2 pagesRotational Motionmrclaudexyz710No ratings yet
- 6502061-พรพรหม พรมพลอยDocument1 page6502061-พรพรหม พรมพลอยxnqt5n8q89No ratings yet
- Handbook of XPS PDFDocument193 pagesHandbook of XPS PDFBernay CifuentesNo ratings yet
- Contactos Auxiliares NSX100FDocument4 pagesContactos Auxiliares NSX100FLeonardoNo ratings yet
- GS DocsDocument1 pageGS Docsar.gsalongaNo ratings yet
- Semi ConductorDocument1 pageSemi Conductorbolero3241No ratings yet
- Agnus Missa Tertia (Haller)Document4 pagesAgnus Missa Tertia (Haller)Coral Jesus DespojadoNo ratings yet
- Chemistry Mind Maps.Document1 pageChemistry Mind Maps.Ajab MookhtiarNo ratings yet
- Formulaire GMRT 1Document1 pageFormulaire GMRT 1martaNo ratings yet
- Master PlanDocument1 pageMaster PlanBerylsom MorrisNo ratings yet
- FFFDocument2 pagesFFFMohamed TalebNo ratings yet
- Delta 1: Localización en El Mapa de ColombiaDocument1 pageDelta 1: Localización en El Mapa de Colombiafull papeleriaNo ratings yet
- LOCALIZACIÓNDocument1 pageLOCALIZACIÓNfull papeleriaNo ratings yet
- Indaaas 115Document1 pageIndaaas 115Vijaypal Singh RathoreNo ratings yet
- Spectrum WhiteDocument1 pageSpectrum WhitethebigfishxNo ratings yet
- React Scales PosterDocument1 pageReact Scales Postercobalt59No ratings yet
- Tema 6Document2 pagesTema 6Marua AbselamNo ratings yet
- 5 Hilux (Cont. Next Page) : Power Source Engine Control (1TR-FE, 2TR-FE)Document4 pages5 Hilux (Cont. Next Page) : Power Source Engine Control (1TR-FE, 2TR-FE)Asd Man100% (2)
- RF and EMC Formulas and Charts: Conversions for 50Ω Environment Antenna Equations www.arworld.usDocument1 pageRF and EMC Formulas and Charts: Conversions for 50Ω Environment Antenna Equations www.arworld.usamirNo ratings yet
- 397 Fishkill Ave - Revised Bid Set - 240227 (Per Add1)Document20 pages397 Fishkill Ave - Revised Bid Set - 240227 (Per Add1)awais.mfbzoneNo ratings yet
- Cinetica Particula 1d 2d 2da Ley NewtonDocument7 pagesCinetica Particula 1d 2d 2da Ley NewtonJordan Castillo FiestasNo ratings yet
- Defect Analysis - Mar 12 Vs Apr 12Document13 pagesDefect Analysis - Mar 12 Vs Apr 12racingspirit80No ratings yet
- Site Dev Phase 2 Lamp Post Connection-ModelDocument1 pageSite Dev Phase 2 Lamp Post Connection-Modeljames cortejosNo ratings yet
- Reach 1A Tentative DrawingDocument3 pagesReach 1A Tentative DrawingTUSHAR RATHODNo ratings yet
- IGCSE Chemistry NotesDocument16 pagesIGCSE Chemistry NotesIbraheem4life officialNo ratings yet
- R_IGCSE Resources | Topical Notes by Chapter for IGCSE Chemistry | Written by VeDocument14 pagesR_IGCSE Resources | Topical Notes by Chapter for IGCSE Chemistry | Written by VeyashikaNo ratings yet
- Mecânica Geral 2Document1 pageMecânica Geral 2Renan QueirozNo ratings yet
- B1 - (05) - R3 - Fourth Floor LayoutDocument1 pageB1 - (05) - R3 - Fourth Floor LayoutBernardo Cuamba JuniorNo ratings yet
- According To ThermodynamicDocument4 pagesAccording To Thermodynamicali madjidNo ratings yet
- Bus Control: AGC VT CSDocument3 pagesBus Control: AGC VT CSTecnico GenioNo ratings yet
- Midas MD-TV29399 Con UOC TMPA8879CSN Diagrama PDFDocument3 pagesMidas MD-TV29399 Con UOC TMPA8879CSN Diagrama PDFOdaliz EspinozaNo ratings yet
- Form R1 - 2 Report On Family StatusDocument1 pageForm R1 - 2 Report On Family StatusOmakoi MalangNo ratings yet
- Can Can From Orphée Aux Enfers Offenbach Piano Sheet MusicDocument2 pagesCan Can From Orphée Aux Enfers Offenbach Piano Sheet MusicPublicDomainSheets80% (5)
- A Detailed Lesson Plan On The Nature and Characteristics of Waves Modified Sept.21, 16Document10 pagesA Detailed Lesson Plan On The Nature and Characteristics of Waves Modified Sept.21, 16Jeiril Divino100% (23)
- LIGHT 7 Es APARENTE MIRASOLDocument8 pagesLIGHT 7 Es APARENTE MIRASOLMirasol Aparente100% (1)
- Physics101-Second Major-152-SolutionDocument9 pagesPhysics101-Second Major-152-SolutionAsrianorNo ratings yet
- Practice Test2 ps150Document3 pagesPractice Test2 ps150Antoine S. NdiayeNo ratings yet
- FRICTIONALDocument13 pagesFRICTIONALCleraNo ratings yet
- DH RepresentationDocument3 pagesDH RepresentationChandni DayakarNo ratings yet
- Gejala GelombangDocument6 pagesGejala GelombangVincent VetterNo ratings yet
- EM76 - Modal Testing Part 1 - Introduction & Impact TestingDocument4 pagesEM76 - Modal Testing Part 1 - Introduction & Impact TestingChad HuntNo ratings yet
- Work, Energy&Power (Nitin M Sir)Document6 pagesWork, Energy&Power (Nitin M Sir)Kenny RuizNo ratings yet
- Formula+data Sheet For Edexcel Ial MathDocument4 pagesFormula+data Sheet For Edexcel Ial Mathlinda heatherNo ratings yet
- Mathematics Extension 2 Assessment Task SbhsDocument8 pagesMathematics Extension 2 Assessment Task SbhsCalvin YaoNo ratings yet
- CAMS - M4 - Manoeuvring Models PDFDocument33 pagesCAMS - M4 - Manoeuvring Models PDFtoshugoNo ratings yet
- Chapter 2 - Ideal Flow Theory PDFDocument51 pagesChapter 2 - Ideal Flow Theory PDFSanthoshinii RamalingamNo ratings yet
- Prob 3 ANS PDFDocument5 pagesProb 3 ANS PDFJames TheeNo ratings yet
- Development of Quantum Mechanics: Earning BjectivesDocument83 pagesDevelopment of Quantum Mechanics: Earning Bjectivesshubham tejaniNo ratings yet
- New 1Document20 pagesNew 1Richard EstradaNo ratings yet
- Slide UT Part 2Document46 pagesSlide UT Part 2Trung Tinh HoNo ratings yet
- Forces and MotionDocument4 pagesForces and MotionMu'iz RahmanNo ratings yet
- AGARDAG323Document251 pagesAGARDAG323Theodoros TriantafyllouNo ratings yet
- R5310304-Kinematics of MachineryDocument4 pagesR5310304-Kinematics of MachinerysivabharathamurthyNo ratings yet
- HtKe (1e) PDFDocument120 pagesHtKe (1e) PDFRajat KaliaNo ratings yet
- Calculus 10th Edition by Anton Bivens Davis ISBN Test BankDocument11 pagesCalculus 10th Edition by Anton Bivens Davis ISBN Test Bankrebecca100% (30)
- Torreti - Bachelard e FenomenotecnicaDocument19 pagesTorreti - Bachelard e FenomenotecnicaGabriel Kafure da RochaNo ratings yet
- 05 Projectile MotionDocument5 pages05 Projectile MotionBass ŌkamiNo ratings yet
- Open Channel FlowDocument161 pagesOpen Channel FlowJuan Hero100% (1)
- Potential Flow PDFDocument8 pagesPotential Flow PDFAsal MortazaviNo ratings yet
- Lesson 3 Phy 1Document20 pagesLesson 3 Phy 1Gen Z LearnersNo ratings yet
- PHYSICS Tut-01 Vectors PDFDocument2 pagesPHYSICS Tut-01 Vectors PDFCharlotte ChamaNo ratings yet
- CEDYNA20 Fixed Axis RotationDocument111 pagesCEDYNA20 Fixed Axis RotationJulius UbanosNo ratings yet
- Solution For Chapter 4 Differential Flow PDFDocument24 pagesSolution For Chapter 4 Differential Flow PDFBowo Yuli PrasetyoNo ratings yet