Download as pdf or txt
You might also like
- Multilabel Classification Problem Analysis Metrics and Techniques PDFDocument200 pagesMultilabel Classification Problem Analysis Metrics and Techniques PDFiamadnanNo ratings yet
- Genetic Optimization of Cut Order Planning in Apparel ManufacturingDocument142 pagesGenetic Optimization of Cut Order Planning in Apparel Manufacturingrorrito33100% (1)
- A Competitive Genetic Algorithm For Resource-Constrained Project SchedulingDocument16 pagesA Competitive Genetic Algorithm For Resource-Constrained Project Schedulingrorrito33No ratings yet
- Meier2016 Article OptimizingTimeCostTrade-offsInDocument20 pagesMeier2016 Article OptimizingTimeCostTrade-offsInI Wayan JoshuaNo ratings yet
- Optimizing Time Cost Trade Off Scheduling by Genetic AlgorithmDocument9 pagesOptimizing Time Cost Trade Off Scheduling by Genetic AlgorithmInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Multimodal Optimization For Time-Cost Trade-Off in Construction Projects Using A Novel Hybrid Method Based On FA and PSODocument15 pagesMultimodal Optimization For Time-Cost Trade-Off in Construction Projects Using A Novel Hybrid Method Based On FA and PSOEdwin David TrianaNo ratings yet
- Vanhouckeand Debels Jo S2007Document16 pagesVanhouckeand Debels Jo S2007rorrito33No ratings yet
- Construction_Time-Cost_Optimization_Modeling_UsingDocument18 pagesConstruction_Time-Cost_Optimization_Modeling_Usingjarvisle11No ratings yet
- Vanhoucke HPMS2015Document20 pagesVanhoucke HPMS2015rorrito33No ratings yet
- RIEJ - Volume 6 - Issue 4 - Pages 283-292Document10 pagesRIEJ - Volume 6 - Issue 4 - Pages 283-292Michelle AngelNo ratings yet
- Computers & Industrial Engineering: Faezeh Mohammadipour, Seyed Jafar SadjadiDocument11 pagesComputers & Industrial Engineering: Faezeh Mohammadipour, Seyed Jafar Sadjadirorrito33No ratings yet
- Developing An Optimization Financing Cost-Scheduling Trade-Off Model in Construction ProjectDocument17 pagesDeveloping An Optimization Financing Cost-Scheduling Trade-Off Model in Construction ProjectParas MongiaNo ratings yet
- 002 - 313 - Jurnal FOADocument9 pages002 - 313 - Jurnal FOAHendrixon Abu ZahwanNo ratings yet
- Ant Colony OptimizationDocument17 pagesAnt Colony Optimizationavishain1No ratings yet
- Sureshmarappan@iitb - Ac.in Kjain@iitb - Ac.in Pdutta@iitb - Ac.inDocument25 pagesSureshmarappan@iitb - Ac.in Kjain@iitb - Ac.in Pdutta@iitb - Ac.inMame WoldaNo ratings yet
- Genetic Algorithm For Project Time-Cost OptimizatiDocument18 pagesGenetic Algorithm For Project Time-Cost OptimizatiHoa Pham Tam BuiNo ratings yet
- SchedulingDocument6 pagesSchedulingVanderli AlvesNo ratings yet
- A State of Art Review On Time Cost Trade Off Problems in Project SchedulingDocument8 pagesA State of Art Review On Time Cost Trade Off Problems in Project SchedulingInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- The Discrete Time-Cost Trade-Off Problem - Exact and Heuristic ProceduresDocument37 pagesThe Discrete Time-Cost Trade-Off Problem - Exact and Heuristic Proceduresmg_catanaNo ratings yet
- ERP Consultant Selection Problem Using AHP, Fuzzy AHP and ANP - A Case Study in TurkeyDocument12 pagesERP Consultant Selection Problem Using AHP, Fuzzy AHP and ANP - A Case Study in TurkeyshayanaliyannezhadNo ratings yet
- Project Management and SchedulingDocument5 pagesProject Management and SchedulingKemp JasonNo ratings yet
- 1 s2.0 S0957417415008490 MainDocument9 pages1 s2.0 S0957417415008490 MainW.N. Ricci S.No ratings yet
- Literature Review On Inventory Lot SizingProblemsDocument16 pagesLiterature Review On Inventory Lot SizingProblemsElvira TollaNo ratings yet
- Genetic Algorithm Based Optimization Model For Time-Cost Trade-Off For Construction ProjectDocument12 pagesGenetic Algorithm Based Optimization Model For Time-Cost Trade-Off For Construction ProjectIJRASETPublicationsNo ratings yet
- Amulti Phasecoveringpareto OptimalfrontmethodDocument28 pagesAmulti Phasecoveringpareto OptimalfrontmethodarpitdagreatNo ratings yet
- Project Time-Cost Analysis Under Generalised Precedence RelationsDocument10 pagesProject Time-Cost Analysis Under Generalised Precedence RelationsVitor FeitozaNo ratings yet
- Time Quality Cost TradeoffDocument11 pagesTime Quality Cost TradeoffMohamed EidNo ratings yet
- Heuristic Methods For The Single Machine Scheduling Problem With Different Ready Times and A Common Due DateDocument13 pagesHeuristic Methods For The Single Machine Scheduling Problem With Different Ready Times and A Common Due Dateamirr999999No ratings yet
- Fuzzy SA For Project Time Cost Trade Off - MilenkovicDocument14 pagesFuzzy SA For Project Time Cost Trade Off - MilenkovicMiloš MilenkovićNo ratings yet
- Formatted Thesis For PDFDocument85 pagesFormatted Thesis For PDFSanjay TiwariNo ratings yet
- 513-Article Text-1583-1-10-20211115Document10 pages513-Article Text-1583-1-10-20211115hairieNo ratings yet
- Planning Electric Power Systems Under Demand Uncertainty With Different Technology Lead TimesDocument18 pagesPlanning Electric Power Systems Under Demand Uncertainty With Different Technology Lead TimesGermán Arias FernándezNo ratings yet
- 09 - EARNED VALUE METHOD - Nengah Putra Apriyanto - INDODocument18 pages09 - EARNED VALUE METHOD - Nengah Putra Apriyanto - INDOJoel Jeffery SarkarNo ratings yet
- A Genetic Algorithm Approach For Multiple Criteria Facility Layout DesignDocument21 pagesA Genetic Algorithm Approach For Multiple Criteria Facility Layout DesignMelissa RuedaNo ratings yet
- Wyndor Glass Company ExampleDocument7 pagesWyndor Glass Company ExamplezulkoNo ratings yet
- Sontamino2014 PDFDocument10 pagesSontamino2014 PDFKhalis MahmudahNo ratings yet
- Modeling in Project Planning and SchedulDocument6 pagesModeling in Project Planning and SchedulLuis CastilloNo ratings yet
- Earliness and Tardiness Single Machine Scheduling Problems Using Neural NetworkDocument6 pagesEarliness and Tardiness Single Machine Scheduling Problems Using Neural NetworkerpublicationNo ratings yet
- A Fuzzy Linguistic Approach of Preventive Maintenance Scheduling Cost OptimisationDocument13 pagesA Fuzzy Linguistic Approach of Preventive Maintenance Scheduling Cost Optimisationkarthikeyan PNo ratings yet
- Icccbe X 120Document9 pagesIcccbe X 120hyari2011No ratings yet
- Louly Dolgui 2002 IglsDocument6 pagesLouly Dolgui 2002 IglsKate Marulanda JimenezNo ratings yet
- Computers & Industrial EngineeringDocument12 pagesComputers & Industrial EngineeringHelc LarcasNo ratings yet
- Alkindipublisher1982,+Paper+2+ (2020 1 1) +Optimization+of+Job+Shop+Schedule+ProblemDocument7 pagesAlkindipublisher1982,+Paper+2+ (2020 1 1) +Optimization+of+Job+Shop+Schedule+ProblemTrinh Minh Phu B2109780No ratings yet
- Time, Cost and Quality Trade-Off in Project ManagementDocument8 pagesTime, Cost and Quality Trade-Off in Project Managementapi-3707091100% (2)
- A Grasshopper Optimization Algorithm For Optimal Short Term - 2021 - Energy RepDocument10 pagesA Grasshopper Optimization Algorithm For Optimal Short Term - 2021 - Energy Repwahyu rifa'iNo ratings yet
- Automation in Construction: Magdalena Rogalska, Wojciech Bo Żejko, Zdzis Ław HejduckiDocument8 pagesAutomation in Construction: Magdalena Rogalska, Wojciech Bo Żejko, Zdzis Ław Hejduckimalik abdul azizNo ratings yet
- A Dynamic Crashing Method For Project Management Using Simulation-Based OptimizationDocument7 pagesA Dynamic Crashing Method For Project Management Using Simulation-Based OptimizationAbdulKerim AyubNo ratings yet
- Operations ResearchDocument7 pagesOperations Researchanas aliNo ratings yet
- Application of Chaos Discrete Particle Swarm Optimization Algorithm On Pavement Maintenance Scheduling ProblemDocument11 pagesApplication of Chaos Discrete Particle Swarm Optimization Algorithm On Pavement Maintenance Scheduling ProblemAna Claudia BoettcherNo ratings yet
- Time Cost and Quality Trade Off AnalysisDocument11 pagesTime Cost and Quality Trade Off AnalysisJelly SurbaktiNo ratings yet
- MB0048 Set 1 & 2Document14 pagesMB0048 Set 1 & 2Shravanti Bhowmik SenNo ratings yet
- An Artificial Neural Network Approach To Structural Cost EstimationDocument8 pagesAn Artificial Neural Network Approach To Structural Cost EstimationJinhan KimNo ratings yet
- An Integration of Spreadsheet and Project ManagemeDocument11 pagesAn Integration of Spreadsheet and Project Managemerorrito33No ratings yet
- 1 s2.0 S0377221721002605 MainDocument17 pages1 s2.0 S0377221721002605 MainYoya LoyaNo ratings yet
- Kholil 2018 IOP Conf. Ser. Earth Environ. Sci. 140 012010Document9 pagesKholil 2018 IOP Conf. Ser. Earth Environ. Sci. 140 012010Mint FlakeNo ratings yet
- 1 s2.0 S0360835219302578 MainDocument10 pages1 s2.0 S0360835219302578 MainW.N. Ricci S.No ratings yet
- Computers & Industrial Engineering: A. CostaDocument18 pagesComputers & Industrial Engineering: A. CostaOlivia brianneNo ratings yet
- Delay Analysis Methods and Factors Affecting Their Selection in The Construction Industry in Gaza StripDocument12 pagesDelay Analysis Methods and Factors Affecting Their Selection in The Construction Industry in Gaza StripsarbajitNo ratings yet
- Economic Space Utilization and Sustainability by IT Based Optimization - Research ReportDocument13 pagesEconomic Space Utilization and Sustainability by IT Based Optimization - Research ReportBranimir BobanacNo ratings yet
- Scheduling: Theory, Algorithms and Systems Development: January 1992Document9 pagesScheduling: Theory, Algorithms and Systems Development: January 1992Francesco BNo ratings yet
- Resource Leveling Using Genetic AlgorithmsDocument9 pagesResource Leveling Using Genetic AlgorithmsPaul DavisNo ratings yet
- Computational Geometry: Exploring Geometric Insights for Computer VisionFrom EverandComputational Geometry: Exploring Geometric Insights for Computer VisionNo ratings yet
- Time-Cost Tradeoff Problems Solutions For ConstrucDocument16 pagesTime-Cost Tradeoff Problems Solutions For Construcrorrito33No ratings yet
- Supply Chain Disruption Management Using Stochastic Mixed Integer Programming (PDFDrive)Document364 pagesSupply Chain Disruption Management Using Stochastic Mixed Integer Programming (PDFDrive)rorrito33No ratings yet
- Computational Experience With A Branch-And-Bound PDocument41 pagesComputational Experience With A Branch-And-Bound Prorrito33No ratings yet
- Vanhoucke HPMS2015Document20 pagesVanhoucke HPMS2015rorrito33No ratings yet
- Vanhouckeand Debels Jo S2007Document16 pagesVanhouckeand Debels Jo S2007rorrito33No ratings yet
- A Unit Based Crashing Pert Network For Optimization of Software Project CostDocument11 pagesA Unit Based Crashing Pert Network For Optimization of Software Project Costrorrito33No ratings yet
- Vanhoucke Cooperetal PMJ2019Document13 pagesVanhoucke Cooperetal PMJ2019rorrito33No ratings yet
- TCTP CompletDocument255 pagesTCTP Completrorrito33No ratings yet
- Itor2016 - Tctp-Nivelación OkDocument21 pagesItor2016 - Tctp-Nivelación Okrorrito33No ratings yet
- A Branch-And-Bound Procedure For The Multiple ResoDocument3 pagesA Branch-And-Bound Procedure For The Multiple Resororrito33No ratings yet
- Computers & Industrial Engineering: Faezeh Mohammadipour, Seyed Jafar SadjadiDocument11 pagesComputers & Industrial Engineering: Faezeh Mohammadipour, Seyed Jafar Sadjadirorrito33No ratings yet
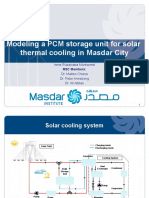
- Modeling A PCM Storage Unit For Solar Thermal Cooling in Masdar CityDocument15 pagesModeling A PCM Storage Unit For Solar Thermal Cooling in Masdar Cityrorrito33No ratings yet
- European Journal of Operational Research: Jully Jeunet, Mayassa Bou OrmDocument19 pagesEuropean Journal of Operational Research: Jully Jeunet, Mayassa Bou Ormrorrito33No ratings yet
- An Integration of Spreadsheet and Project ManagemeDocument11 pagesAn Integration of Spreadsheet and Project Managemerorrito33No ratings yet
- Programaciíon AMPL - GUIDocument110 pagesProgramaciíon AMPL - GUIrorrito33No ratings yet
- Trabajo HerreolenDocument76 pagesTrabajo Herreolenrorrito33No ratings yet
- Pakgohar ADocument267 pagesPakgohar Arorrito33No ratings yet
- Construction Site Management and Labor Productivity PDFDocument312 pagesConstruction Site Management and Labor Productivity PDFrorrito33100% (1)
- Marco A. Bragadin Andrea Ballabeni Kalle KähkönenDocument8 pagesMarco A. Bragadin Andrea Ballabeni Kalle Kähkönenrorrito33No ratings yet
- Computational Intelligence and Metaheuristuc Algorithms With AplplicationsDocument489 pagesComputational Intelligence and Metaheuristuc Algorithms With Aplplicationsrorrito33No ratings yet
- Algorithm Structure C++ - Teo OK PDFDocument126 pagesAlgorithm Structure C++ - Teo OK PDFrorrito33No ratings yet
- Evolutionary Algorithms and Metaheuristics in Civil Engineering and Construction Management OK PDFDocument132 pagesEvolutionary Algorithms and Metaheuristics in Civil Engineering and Construction Management OK PDFrorrito33No ratings yet
- PMKI IndexDocument14 pagesPMKI Indexrorrito33No ratings yet
- Genetic Algorithms As Tool For Development of Balanced CurriculumDocument19 pagesGenetic Algorithms As Tool For Development of Balanced Curriculumrorrito33No ratings yet
- Test Instances: Appendix ADocument40 pagesTest Instances: Appendix Arorrito33No ratings yet
- CHOCOLATEDocument3 pagesCHOCOLATEHapor RennieNo ratings yet
- Natural Language Processing Lec 1Document23 pagesNatural Language Processing Lec 1Touseef sultanNo ratings yet
- Science A Thon - DensityDocument23 pagesScience A Thon - DensityRupali MohireNo ratings yet
- New Microsoft Word DocumentDocument2 pagesNew Microsoft Word DocumentEx BilliNo ratings yet
- Privacy and Public InterestDocument21 pagesPrivacy and Public InterestKarishma SureshNo ratings yet
- Teachers Manual PDFDocument110 pagesTeachers Manual PDFsgw67No ratings yet
- Rebate ProcessingDocument19 pagesRebate ProcessingPankaj100% (2)
- Langoly Free Study Planner FillableDocument10 pagesLangoly Free Study Planner FillableShen ShenNo ratings yet
- A Position Paper PatDocument2 pagesA Position Paper PatReymart BuenNo ratings yet
- Gabeto vs. AranetaDocument1 pageGabeto vs. AranetaJolynne Anne GaticaNo ratings yet
- Scheme of Work - Paper 1: Cambridge O Level Islamiyat 2058Document27 pagesScheme of Work - Paper 1: Cambridge O Level Islamiyat 2058Ayesha FarhanNo ratings yet
- AFM Class NotesDocument33 pagesAFM Class NotesSamil MusthafaNo ratings yet
- Tata Health Insurance-Listed HospitalDocument10 pagesTata Health Insurance-Listed Hospitalhelpsite.inNo ratings yet
- Training Evaluation FormDocument2 pagesTraining Evaluation FormPauline BugupNo ratings yet
- Alexa Gomez Analysis of The RavenDocument3 pagesAlexa Gomez Analysis of The RavenAlexa GomezNo ratings yet
- Hallelujah To My KingDocument0 pagesHallelujah To My KingMike RhNo ratings yet
- Effective Work Breakdown StructuresDocument59 pagesEffective Work Breakdown Structureskrvoliptanje100% (1)
- Udacity Enterprise Syllabus Digital Marketing Nd018Document18 pagesUdacity Enterprise Syllabus Digital Marketing Nd018Awil AhmedNo ratings yet
- Mughal ArchitectureDocument9 pagesMughal ArchitectureLettisha LijuNo ratings yet
- 1ST Q PerdevDocument4 pages1ST Q PerdevMark Laurence RubioNo ratings yet
- Osho On ParentingDocument2 pagesOsho On ParentingPratiksha GawasNo ratings yet
- Transitioning Afghanistan: A Year After Taliban and Way ForwardDocument10 pagesTransitioning Afghanistan: A Year After Taliban and Way ForwardInstitute of Policy Studies100% (1)
- Admas University: MICROECONOMICS-II: Group AssignmentDocument2 pagesAdmas University: MICROECONOMICS-II: Group Assignmentgm29No ratings yet
- Legitimacy of Child in Void and Voidable Marriages.Document7 pagesLegitimacy of Child in Void and Voidable Marriages.Ridhima Purohit100% (2)
- Grid Analysis: Making A Decision by Weighing Up Different FactorsDocument2 pagesGrid Analysis: Making A Decision by Weighing Up Different FactorsFebby LienNo ratings yet
- 42 People's Industrial and Commercial Corp. vs. Court of AppealsDocument2 pages42 People's Industrial and Commercial Corp. vs. Court of AppealsJemNo ratings yet
- Integrated Marketing Communications ThesisDocument5 pagesIntegrated Marketing Communications Thesisangiejensenevansville100% (2)
- VonGaluss MansionDocument19 pagesVonGaluss MansionMatthew Cordle100% (1)
- NewsletterDocument2 pagesNewsletterboonchuan20095886No ratings yet