Download as ppsx, pdf, or txt
You might also like
- UGRD-IT6200B Quantitative Methods ALL INDocument11 pagesUGRD-IT6200B Quantitative Methods ALL INWILDRAT CLIPS67% (3)
- Rayleigh Ritz MethodDocument7 pagesRayleigh Ritz Methodrameshbabu_197963% (8)
- Theory of Structures Problems Solved by DK MamonaiDocument72 pagesTheory of Structures Problems Solved by DK MamonaiDarya Memon94% (103)
- LNC-Operation Manual 1 PDFDocument197 pagesLNC-Operation Manual 1 PDFDoug Ray0% (1)
- Experiment 3 - Jet ImpactDocument18 pagesExperiment 3 - Jet ImpactKhairil Ikram75% (4)
- Week 10-Feedback ControlDocument34 pagesWeek 10-Feedback ControlMohd Aizad100% (1)
- Feedback Controller: Proportional, Integral, Derivative (PID)Document34 pagesFeedback Controller: Proportional, Integral, Derivative (PID)Ereen100% (1)
- Week 12 - Control SystemDocument30 pagesWeek 12 - Control SystemAzizan Anuar100% (1)
- Week14pidmay242016pe3032 160530081519Document57 pagesWeek14pidmay242016pe3032 160530081519AztvNo ratings yet
- Basics of - PID ControlersDocument26 pagesBasics of - PID ControlersNair67udayNo ratings yet
- Dynamic Behavior of Feedback Control ProcessesDocument12 pagesDynamic Behavior of Feedback Control ProcessesAubrenica Lopez100% (1)
- Study of ON OFF P PI PD PID ControllerDocument10 pagesStudy of ON OFF P PI PD PID ControllerMaddy SharmaNo ratings yet
- IT-4406 __PIDDocument30 pagesIT-4406 __PIDAhsan MalikNo ratings yet
- PID ControllerDocument22 pagesPID ControllerannonymousNo ratings yet
- PidDocument18 pagesPidByron Xavier Lima CedilloNo ratings yet
- Pragna: Instruction and OperationDocument19 pagesPragna: Instruction and Operationapi-19787379No ratings yet
- CAT - G3516H Generator Output Power - Test PDFDocument3 pagesCAT - G3516H Generator Output Power - Test PDFwagner_guimarães_1No ratings yet
- Pid Oil&gasDocument26 pagesPid Oil&gasRicardo ZambranaNo ratings yet
- Lab 7 Pid ControlDocument6 pagesLab 7 Pid ControlFatin FarehahNo ratings yet
- Lesson 1: Introduction To Control Systems TechnologyDocument28 pagesLesson 1: Introduction To Control Systems TechnologyJiss Mohan KNo ratings yet
- Automation Process ControlDocument39 pagesAutomation Process ControlAbdurabu AL-MontaserNo ratings yet
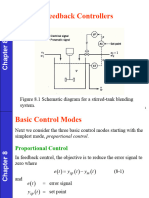
- Feedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemDocument42 pagesFeedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemJoy RoyNo ratings yet
- 2 Automatic ControllersDocument26 pages2 Automatic ControllersCupa no DensetsuNo ratings yet
- 9-Pid ControlDocument16 pages9-Pid ControlM Danyal AslamNo ratings yet
- Exp - P8 - Multiprocess TrainerDocument19 pagesExp - P8 - Multiprocess TrainerSiddesh PatilNo ratings yet
- Control of Continuous Process: Lecturer: Dr. Shallon StubbsDocument32 pagesControl of Continuous Process: Lecturer: Dr. Shallon StubbsLuther King Ferguson100% (1)
- Proportional Integral AND Derivative ControllerDocument16 pagesProportional Integral AND Derivative ControllerAzhar AliNo ratings yet
- Process Control - Chapter 7JUDocument42 pagesProcess Control - Chapter 7JUY MuNo ratings yet
- Week 2Document13 pagesWeek 2Abdinasir AliNo ratings yet
- Process Chapter 3Document35 pagesProcess Chapter 3Estifanos FitsumNo ratings yet
- KMM411E - Lesson7a - Feedback Controllers - 14nov2022Document56 pagesKMM411E - Lesson7a - Feedback Controllers - 14nov2022hairen jegerNo ratings yet
- 10 - 1 PID ControllersDocument36 pages10 - 1 PID ControllersShilpya KurniasihNo ratings yet
- Tuning of Pid Controller With Fuzzy LogicDocument17 pagesTuning of Pid Controller With Fuzzy LogicJurgen CokuNo ratings yet
- ControllersDocument32 pagesControllersEric KamauNo ratings yet
- ERT 321 Process Control & Dynamics: Feedback ControllersDocument34 pagesERT 321 Process Control & Dynamics: Feedback Controllershakita86No ratings yet
- Control Systems Overview Professor GopalankrishnaDocument23 pagesControl Systems Overview Professor GopalankrishnaJameNo ratings yet
- CH 05 (Process Controllers)Document35 pagesCH 05 (Process Controllers)32anikkumarpaulNo ratings yet
- 5 PID ControlDocument45 pages5 PID ControlaldidwilaksitaNo ratings yet
- Control Tutorials For MATLAB and Simulink - Introduction - PID Controller DesignDocument17 pagesControl Tutorials For MATLAB and Simulink - Introduction - PID Controller DesignPrashant ChinamalliNo ratings yet
- Computer ClockDocument13 pagesComputer ClockGlan DevadhasNo ratings yet
- ControllersDocument41 pagesControllersAthiradh R NNo ratings yet
- Simple Process Control Loop (With Negative Feedback)Document55 pagesSimple Process Control Loop (With Negative Feedback)Ankan Bhunia100% (1)
- 5 - PID IAPC - MergedDocument20 pages5 - PID IAPC - MergedNikita ChaudhariNo ratings yet
- PracticalDocument10 pagesPracticalSec ArcNo ratings yet
- Experiment FileDocument40 pagesExperiment FilePankaj SharmaNo ratings yet
- WK 14 Pe 3032 PID May 25,2015Document22 pagesWK 14 Pe 3032 PID May 25,2015biruk1No ratings yet
- Unit No. 06Document28 pagesUnit No. 06Sainand JadhavNo ratings yet
- BLR-CX BrochureDocument4 pagesBLR-CX BrochureHazem Al-kayaliNo ratings yet
- EEE 101 Experiment 2: Feedback Implementation and Error SignalsDocument6 pagesEEE 101 Experiment 2: Feedback Implementation and Error SignalsHahns Anthony GenatoNo ratings yet
- Controller NotesDocument11 pagesController NotesPratik PatilNo ratings yet
- University of Palestine: Electrical Machine & Control SystemsDocument26 pagesUniversity of Palestine: Electrical Machine & Control SystemsHatem DheerNo ratings yet
- Experiment No - 4aDocument2 pagesExperiment No - 4aurstranger0No ratings yet
- Proportional Integral Derivative (PID)Document27 pagesProportional Integral Derivative (PID)GilagidkidNo ratings yet
- Experiment No. 03: (P Controller)Document8 pagesExperiment No. 03: (P Controller)KADUSKAR PALASHNo ratings yet
- Lab 5 ControlDocument5 pagesLab 5 ControlOsama GamingNo ratings yet
- Modelling, Feedback Control Design and Simulation of An Industrial ApplicationDocument21 pagesModelling, Feedback Control Design and Simulation of An Industrial ApplicationjttatsumiNo ratings yet
- Performance Analysis of Speed Control of DC Motor Using P Pi PD and Pid Controllers IJERTV2IS50098Document7 pagesPerformance Analysis of Speed Control of DC Motor Using P Pi PD and Pid Controllers IJERTV2IS50098Rohith YerrabachalaNo ratings yet
- Artigo SintoniaDocument6 pagesArtigo SintoniaMatheus Rodrigues de Menezes TeixeiraNo ratings yet
- Lab 5 ControlDocument5 pagesLab 5 ControlOsama GamingNo ratings yet
- Chapter 8 Feedback ControllersDocument36 pagesChapter 8 Feedback Controllersqwerty 3340No ratings yet
- PID Control Fatek PLC ManualDocument9 pagesPID Control Fatek PLC ManualSaaddin Nur SaidNo ratings yet
- EN5001 - Electronic Control Systems: Department of Electronic and Telecommunication EngineeringDocument11 pagesEN5001 - Electronic Control Systems: Department of Electronic and Telecommunication EngineeringSurangaGNo ratings yet
- Session1 SC16B047Document7 pagesSession1 SC16B047riyazuddin shaikNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Anti Pumping Device / Relay (APD or APC) : Inventa Electro Systems (Nasik) PVT .LTDDocument7 pagesAnti Pumping Device / Relay (APD or APC) : Inventa Electro Systems (Nasik) PVT .LTDragab abulmagdNo ratings yet
- أنظمة الحريق - الهندسة المدنية - منتدى المهندسDocument7 pagesأنظمة الحريق - الهندسة المدنية - منتدى المهندسragab abulmagdNo ratings yet
- الاعتقاد القادري PDFDocument54 pagesالاعتقاد القادري PDFragab abulmagdNo ratings yet
- Quarry Process StepsDocument1 pageQuarry Process Stepsragab abulmagdNo ratings yet
- الاعتقاد القادري PDFDocument54 pagesالاعتقاد القادري PDFragab abulmagdNo ratings yet
- PWMDocument24 pagesPWMragab abulmagdNo ratings yet
- Direct Torque Control in AC Drive TechnologyDocument4 pagesDirect Torque Control in AC Drive Technologyragab abulmagdNo ratings yet
- 10 Chapter 02 PDFDocument36 pages10 Chapter 02 PDFragab abulmagdNo ratings yet
- Support Spring Calculations-11.10.17 For Cooling Tower AreaDocument12 pagesSupport Spring Calculations-11.10.17 For Cooling Tower AreaadihindNo ratings yet
- Vibration Analysis of Cracked BeamDocument80 pagesVibration Analysis of Cracked Beamyq zhangNo ratings yet
- 7es Lesson Plan Angle PairsDocument7 pages7es Lesson Plan Angle PairsgarcianocrispaulNo ratings yet
- MachineLearning Jan2ndDocument171 pagesMachineLearning Jan2ndgoodboy100% (2)
- Electromagnetism: Physics, Chemistry, Biology, Materials ScienceDocument26 pagesElectromagnetism: Physics, Chemistry, Biology, Materials ScienceJai SheokandNo ratings yet
- Hsslive Xii Maths Lab Manual ScertDocument125 pagesHsslive Xii Maths Lab Manual ScertBhagyaNo ratings yet
- CIVL-365 Tutorial 6 QuestionDocument2 pagesCIVL-365 Tutorial 6 QuestionIvsNo ratings yet
- Syllabus Fall 2015Document1 pageSyllabus Fall 2015Van Thu NguyenNo ratings yet
- Solution Ch05Document14 pagesSolution Ch05sovuthyNo ratings yet
- De Silva Clarence W Sensors and Actuators Control Systems InstrumentationDocument346 pagesDe Silva Clarence W Sensors and Actuators Control Systems Instrumentationjhon jairoNo ratings yet
- Introduction To Algorithms: Divide and ConquerDocument38 pagesIntroduction To Algorithms: Divide and Conquerchakshu agarwalNo ratings yet
- LAS - Gr12 - General Physics 1 Quarter 1 Weeks 1 8Document38 pagesLAS - Gr12 - General Physics 1 Quarter 1 Weeks 1 8maikerujonanchetaNo ratings yet
- XII Hum 2022-23 PDFDocument5 pagesXII Hum 2022-23 PDFShivani ShahiNo ratings yet
- Lesson 7.1 - Polynomial FunctionsDocument20 pagesLesson 7.1 - Polynomial FunctionssdeloagNo ratings yet
- Tempus Et Mobilius. Time and Motion: Tempus Est Mensura Motus Rerum MobiliumDocument2 pagesTempus Et Mobilius. Time and Motion: Tempus Est Mensura Motus Rerum MobiliumHello misterNo ratings yet
- Heat Transfer Problem Solution BSL - Heat Transfer From A Radial Circular FinDocument4 pagesHeat Transfer Problem Solution BSL - Heat Transfer From A Radial Circular FinMitesh WaghelaNo ratings yet
- TCS Previous Years+papersDocument211 pagesTCS Previous Years+papersVinutha MNo ratings yet
- Grade 6 Diagnostic TestDocument10 pagesGrade 6 Diagnostic TestCadigal RoniloNo ratings yet
- Activity 2 - Boyle's LawDocument1 pageActivity 2 - Boyle's LawEderwil Labora75% (4)
- 2.004 Dynamics and Control Ii: Mit OpencoursewareDocument9 pages2.004 Dynamics and Control Ii: Mit OpencoursewareDavid VidalesNo ratings yet
- Ipt CodesDocument6 pagesIpt CodesAbdul QyyoomNo ratings yet
- Gujarat Technological University: B. E. First YearDocument3 pagesGujarat Technological University: B. E. First Yearchiku123No ratings yet
- Engineering Is The Application of Mathematics, Empirical Evidence and Scientific, EconomicDocument5 pagesEngineering Is The Application of Mathematics, Empirical Evidence and Scientific, EconomicKylle BedisNo ratings yet
- Digital Logic Design Lab Manual: Department of Electrical Engineering, Fast-Nu, LahoreDocument115 pagesDigital Logic Design Lab Manual: Department of Electrical Engineering, Fast-Nu, LahoreQasim LodhiNo ratings yet
- Automated Depression Detection Using Deep Representation and Sequence Learning With EEG SignalsDocument12 pagesAutomated Depression Detection Using Deep Representation and Sequence Learning With EEG SignalsMuhammad Nafizur RahmanNo ratings yet