Download as pdf or txt
You might also like
- 04 - Chapter 5Document16 pages04 - Chapter 5Sahiel HaripersadNo ratings yet
- Lab 8Document7 pagesLab 8Sulu YntymakovaNo ratings yet
- Homework 3: Matrix Solution by Computer ProgrammingDocument7 pagesHomework 3: Matrix Solution by Computer ProgrammingdemetNo ratings yet
- Linear Phase Fir Filter Design by Least Squares 7Document8 pagesLinear Phase Fir Filter Design by Least Squares 7JonasHirataNo ratings yet
- Chap 6 SolutionsDocument34 pagesChap 6 Solutionsanonyme3897No ratings yet
- MATH40082 (Computational Finance) Assignment No. 2: Advanced MethodsDocument6 pagesMATH40082 (Computational Finance) Assignment No. 2: Advanced Methodscracking khalifNo ratings yet
- Additional Exercises For Convex Optimization With Solutions Draftnbsped CompressDocument632 pagesAdditional Exercises For Convex Optimization With Solutions Draftnbsped CompressmmmmNo ratings yet
- Double Inverted Pendulum On A Cart-R07Document25 pagesDouble Inverted Pendulum On A Cart-R07Dragan ErcegNo ratings yet
- Seminar 7: Denirea Functiilor Trigonometrice TG Si Cotg, Proprietatile Lor, Formule TrigonometriceDocument1 pageSeminar 7: Denirea Functiilor Trigonometrice TG Si Cotg, Proprietatile Lor, Formule Trigonometricechelarescu anisoarakNo ratings yet
- Solutions CN2116 HW7Document3 pagesSolutions CN2116 HW7Jian HongNo ratings yet
- Formulas For EE 201Document3 pagesFormulas For EE 201berickson_14No ratings yet
- Cs 229, Autumn 2016 Problem Set #2: Naive Bayes, SVMS, and TheoryDocument20 pagesCs 229, Autumn 2016 Problem Set #2: Naive Bayes, SVMS, and TheoryZeeshan Ali SayyedNo ratings yet
- Griffith's Quantum Mechanics Problem 2.51Document3 pagesGriffith's Quantum Mechanics Problem 2.51palisonNo ratings yet
- PHYS 434 - Assignment 4 - Coupled Harmonic OscillatorsDocument10 pagesPHYS 434 - Assignment 4 - Coupled Harmonic Oscillatorsdec292010No ratings yet
- Mini Project 2016Document7 pagesMini Project 2016khooteckkienNo ratings yet
- Problems Chap3Document27 pagesProblems Chap3Mohamed TahaNo ratings yet
- The Inverting IntegratorDocument6 pagesThe Inverting Integratornaveenbabu19No ratings yet
- AMath-Solguide 17bDocument23 pagesAMath-Solguide 17bapi-3855009No ratings yet
- Steel Connections EnuDocument90 pagesSteel Connections EnudrilkerozerNo ratings yet
- HW #8 - SolutionDocument2 pagesHW #8 - SolutionMatty JakeNo ratings yet
- CN2116-HW7-Solution (XJP - 2011)Document12 pagesCN2116-HW7-Solution (XJP - 2011)Brian WatsonNo ratings yet
- NRL Plasma FormularyDocument71 pagesNRL Plasma FormularyU.S. Naval Research LaboratoryNo ratings yet
- Hydrodynamics Project: Lifting Line TheoryDocument16 pagesHydrodynamics Project: Lifting Line TheorymehdiessaxNo ratings yet
- Control Por Computador: December 10, 2013Document41 pagesControl Por Computador: December 10, 2013turbodilanNo ratings yet
- Objectives of Conduction AnalysisDocument30 pagesObjectives of Conduction AnalysisnachappaNo ratings yet
- Simple Harmonic Oscillator: Molecular Dynamics SimulationDocument6 pagesSimple Harmonic Oscillator: Molecular Dynamics Simulationt_sairamNo ratings yet
- Xppaut NotesDocument8 pagesXppaut Notescalvk79No ratings yet
- EE207 Problem Set 1Document2 pagesEE207 Problem Set 1Rishabh AgarwalNo ratings yet
- Microelectronics: Circuit Analysis and Design, 4 Edition by D. A. Neamen Problem SolutionsDocument6 pagesMicroelectronics: Circuit Analysis and Design, 4 Edition by D. A. Neamen Problem SolutionsJano Jesus AlexNo ratings yet
- Report On Proof of Akra Bazzi's Master Theorem.Document2 pagesReport On Proof of Akra Bazzi's Master Theorem.Mayank SinghNo ratings yet
- EE341 FinalDocument4 pagesEE341 FinalLe HuyNo ratings yet
- Homework Chapter3Document26 pagesHomework Chapter3nxey bonxNo ratings yet
- NM Notes PDFDocument153 pagesNM Notes PDFHarshithaNo ratings yet
- Mathematical Methods NotesDocument432 pagesMathematical Methods NotesДимитър ПетровNo ratings yet
- Experiment E. Liquid Level Control Using Coupled TanksDocument29 pagesExperiment E. Liquid Level Control Using Coupled Tanks파랑No ratings yet
- Probability & Random Process: FormulasDocument10 pagesProbability & Random Process: FormulasvrsafeNo ratings yet
- Midterm SolutionDocument8 pagesMidterm SolutionAnonymous 94I9knNo ratings yet
- A Small Signal Model of The BCM PWM SwitchDocument10 pagesA Small Signal Model of The BCM PWM SwitchCluncheNo ratings yet
- Discrete-Time Evaluation of The Time Response: AppendixDocument6 pagesDiscrete-Time Evaluation of The Time Response: AppendixAnonymous WkbmWCa8MNo ratings yet
- Chap13 Et Student SolutionsDocument82 pagesChap13 Et Student SolutionsCody MichelNo ratings yet
- ACTL30004 AssignmentDocument15 pagesACTL30004 AssignmentKeshavNo ratings yet
- CS 229, Autumn 2012 Problem Set #1 Solutions: Supervised LearningDocument16 pagesCS 229, Autumn 2012 Problem Set #1 Solutions: Supervised LearningAvinash JaiswalNo ratings yet
- VSP Lec02 UnfoldingDocument47 pagesVSP Lec02 UnfoldingS RAVINo ratings yet
- Line IntegralDocument22 pagesLine Integraldurga03No ratings yet
- Manual Completo ARM STM32F746ZGDocument1,671 pagesManual Completo ARM STM32F746ZGyuliogaleNo ratings yet
- 07 - Chapter 9Document6 pages07 - Chapter 9Sahiel HaripersadNo ratings yet
- (EE332) (09ECE) (Group13) Report ProjectDocument23 pages(EE332) (09ECE) (Group13) Report ProjectNgô ĐạtNo ratings yet
- French 4 SolutionsDocument10 pagesFrench 4 SolutionsFranky Jose Quintero RangelNo ratings yet
- Laplace Table PDFDocument2 pagesLaplace Table PDFHirsh PithadiaNo ratings yet
- High Gain ObserverDocument21 pagesHigh Gain ObserverGopakumarKodakkallingalNo ratings yet
- State SpaceDocument20 pagesState SpacepattanayaksuchiNo ratings yet
- Linear Control Systems Lecture # 8 Observability & Discrete-Time SystemsDocument25 pagesLinear Control Systems Lecture # 8 Observability & Discrete-Time SystemsRavi VermaNo ratings yet
- Chapter 3 Stability, Controllability and ObservaciltiyDocument41 pagesChapter 3 Stability, Controllability and Observaciltiytarekegn utaNo ratings yet
- Practical 5Document6 pagesPractical 5sahil singhaniaNo ratings yet
- Chapter 3 Vector CalculusDocument68 pagesChapter 3 Vector CalculusKaman KwokNo ratings yet
- Breve Tabla de Integrales: Urs DDocument13 pagesBreve Tabla de Integrales: Urs DMildred MalaveNo ratings yet
- EE302 D Quiz 1 SolutionDocument2 pagesEE302 D Quiz 1 SolutionrushilrmalodeNo ratings yet
- Seli Yuli AntinaDocument8 pagesSeli Yuli AntinaSeliyuli AntinaNo ratings yet
- EEE354 Assignment Answer SchemeDocument7 pagesEEE354 Assignment Answer SchemeIzzat AzmanNo ratings yet
- Assignment 02Document2 pagesAssignment 02Ng KeithNo ratings yet
- Modelling and Simulation-A Power System ExampleDocument28 pagesModelling and Simulation-A Power System ExampleAluri VandanNo ratings yet
- 2020 CAT - It - S SolutionDocument5 pages2020 CAT - It - S SolutionhillaryNo ratings yet
- Basic Concepts in Computer Aided Design (CAD) Part1Document25 pagesBasic Concepts in Computer Aided Design (CAD) Part1karonaNo ratings yet
- How To Check Relative Prime NumbersDocument5 pagesHow To Check Relative Prime NumbersBabar SaeedNo ratings yet
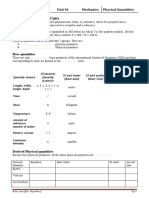
- U01 - Mec - Physical QuantitiesDocument10 pagesU01 - Mec - Physical QuantitiesTesting AcountNo ratings yet
- Tut 1 emDocument2 pagesTut 1 emBishal TiwariNo ratings yet
- Extension Springs Torsion Spring: Active Coils (N)Document9 pagesExtension Springs Torsion Spring: Active Coils (N)Pidathala Raghu Vamsi ReddyNo ratings yet
- Nitomortar TC2000Document3 pagesNitomortar TC2000grtunaNo ratings yet
- Upright Pendent SprinklersDocument5 pagesUpright Pendent SprinklersDammak100% (1)
- Power Theft DetectionDocument18 pagesPower Theft Detectionravi sankar75% (4)
- Mounded Stoarge Vessel C P SystemDocument5 pagesMounded Stoarge Vessel C P SystemRakesh AgrawalNo ratings yet
- 103-2 ss01 SSDocument49 pages103-2 ss01 SSErin LinNo ratings yet
- Certification: Construction and Study of Miniature TrebuchetDocument38 pagesCertification: Construction and Study of Miniature TrebuchetAavash PokhrelNo ratings yet
- NotesDocument123 pagesNotesGAURAV RATHORENo ratings yet
- C7025 (英文) ver1 6Document11 pagesC7025 (英文) ver1 6顏健軒No ratings yet
- Ok 83.28Document1 pageOk 83.28joe_frangiehNo ratings yet
- Trig Exam Example 20-2Document10 pagesTrig Exam Example 20-2api-267824245No ratings yet
- Prelim Set 1, Class X Physics Cbse FinalDocument8 pagesPrelim Set 1, Class X Physics Cbse FinalroythomascNo ratings yet
- Computation of Descriptors For QSARDocument6 pagesComputation of Descriptors For QSARNur RahmawatiNo ratings yet
- Midterm2 1BB3 w2014Document14 pagesMidterm2 1BB3 w2014luluNo ratings yet
- 3B6 Mtech Service ManualDocument1 page3B6 Mtech Service ManualUebi Alves100% (1)
- HW 07Document2 pagesHW 07wtcNo ratings yet
- LME PracticeProblemsDocument49 pagesLME PracticeProblemsyana22No ratings yet
- Maki SlidesDocument22 pagesMaki SlidesDarshanNo ratings yet
- Chiller and AHU NotedDocument126 pagesChiller and AHU Notedkeruks100% (2)
- Physical Science: Title: Formation of Light Elements in The UniverseDocument26 pagesPhysical Science: Title: Formation of Light Elements in The UniverseLawrence Mae Asong Pamotillo II0% (1)
- Agard Ag 302Document102 pagesAgard Ag 302Ania SkierkaNo ratings yet
- Physics JEE Main 2023 Chapterwise PYQs PDFDocument70 pagesPhysics JEE Main 2023 Chapterwise PYQs PDFSrishant KumarNo ratings yet
- Separation Variables2Document17 pagesSeparation Variables2apk bozzNo ratings yet
- AIATSOYMEO2016T05 Solution PDFDocument30 pagesAIATSOYMEO2016T05 Solution PDFsanthosh7kumar-24No ratings yet