Download as pdf or txt
You might also like
- Concrete Pour CardDocument2 pagesConcrete Pour Card112358132188% (8)
- Pinns - Navierstokes - Example: 1 OverviewDocument26 pagesPinns - Navierstokes - Example: 1 OverviewHari Madhavan Krishna KumarNo ratings yet
- Etheridge - Regional To Local Structural Controls On Hydrothermal Mineralisation - Practical Tools For Finding, Delineating and Mining Ore Deposits PDFDocument5 pagesEtheridge - Regional To Local Structural Controls On Hydrothermal Mineralisation - Practical Tools For Finding, Delineating and Mining Ore Deposits PDFnlsb2No ratings yet
- Multiple Non-Rigid Objects Tracking by Modified Kernel Particle FilterDocument4 pagesMultiple Non-Rigid Objects Tracking by Modified Kernel Particle Filterlakshman_117No ratings yet
- Hybrid Training of Feed-Forward Neural Networks With Particle Swarm OptimizationDocument10 pagesHybrid Training of Feed-Forward Neural Networks With Particle Swarm OptimizationAbolfazl AbbasiyanNo ratings yet
- TAES Ballistic PDFDocument32 pagesTAES Ballistic PDFHasannudin BisriNo ratings yet
- DSP Question Bank IV CSE - Cs - 2403docDocument36 pagesDSP Question Bank IV CSE - Cs - 2403docSiva NandanNo ratings yet
- Ororbia Maze LearningDocument10 pagesOrorbia Maze LearningTom WestNo ratings yet
- 5 On Diagonal Approximations ToDocument14 pages5 On Diagonal Approximations ToAKİF BARBAROS DİKMENNo ratings yet
- Overfitting by PSO Trained Feedforward Neural NetworksDocument8 pagesOverfitting by PSO Trained Feedforward Neural NetworksCarlos AdrianoNo ratings yet
- Markov ProcessDocument93 pagesMarkov ProcessDxtr MedinaNo ratings yet
- Forecasting Stock Market Indexes Using Principle Component Analysis and Stochastic Time Effective Neural NetworksDocument30 pagesForecasting Stock Market Indexes Using Principle Component Analysis and Stochastic Time Effective Neural Networkssarte00No ratings yet
- Stable Fourier Neural Networks With Application To Modeling Lettuce GrowthDocument6 pagesStable Fourier Neural Networks With Application To Modeling Lettuce GrowthToprak AlemNo ratings yet
- Cellular Neural Networks: A ReviewDocument31 pagesCellular Neural Networks: A ReviewbeniNo ratings yet
- Quantum Particle Swarm Optimization For ElectromagneticsDocument27 pagesQuantum Particle Swarm Optimization For ElectromagneticsbababhoNo ratings yet
- Maneuvering Target Doppler-Bearing Tracking With Signal Time Delay Using Interacting Multiple Model Algorithms S. Z. Bi and X. Y. RenDocument27 pagesManeuvering Target Doppler-Bearing Tracking With Signal Time Delay Using Interacting Multiple Model Algorithms S. Z. Bi and X. Y. Ren王大明No ratings yet
- 188-Article Text-852-3-10-20221111Document13 pages188-Article Text-852-3-10-20221111YC ChanNo ratings yet
- TSSD 2009Document16 pagesTSSD 2009MongiBESBESNo ratings yet
- Bielecki2007 Chapter ArtificialNeuralNetworksApplicDocument4 pagesBielecki2007 Chapter ArtificialNeuralNetworksApplicFarooq ArshadNo ratings yet
- CS2403 DSPDocument47 pagesCS2403 DSPkar12345aravind100% (1)
- Physics-Informed Echo State Networks For Chaotic Systems ForecastingDocument7 pagesPhysics-Informed Echo State Networks For Chaotic Systems Forecastingjulio.dutraNo ratings yet
- Stability Analysis of Neural Networks-Based SystemDocument8 pagesStability Analysis of Neural Networks-Based SystemJ GNo ratings yet
- Ijct V3i2p19Document7 pagesIjct V3i2p19International Journal of Engineering and TechniquesNo ratings yet
- Spectral Analysis PDFDocument22 pagesSpectral Analysis PDFCesar Castillo100% (1)
- Zhang 2009Document10 pagesZhang 2009Roberth Saénz Pérez AlvaradoNo ratings yet
- 2012 - Analysis of The Influence of Forestry Environments On The Accuracy of GPS Measurements by Means of Recurrent Neural NetworksDocument8 pages2012 - Analysis of The Influence of Forestry Environments On The Accuracy of GPS Measurements by Means of Recurrent Neural NetworksSilverio G. CortesNo ratings yet
- Data Clustering Using Particle Swarm Optimization: - To Show That The Standard PSO Algorithm Can Be UsedDocument6 pagesData Clustering Using Particle Swarm Optimization: - To Show That The Standard PSO Algorithm Can Be UsedKiya Key ManNo ratings yet
- U (1,1) Noncommutative Gauge Theory As The Foundation of 2T-Physics in Field TheoryDocument24 pagesU (1,1) Noncommutative Gauge Theory As The Foundation of 2T-Physics in Field TheoryChandra PrakashNo ratings yet
- ELK 1206 108 Manuscript 2Document18 pagesELK 1206 108 Manuscript 2Moazh TawabNo ratings yet
- A Guide To Recurrent Neural Networks and BackpropaDocument11 pagesA Guide To Recurrent Neural Networks and BackpropaJonas RollerNo ratings yet
- AI512/EE633: Reinforcement Learning: Lecture 2 - Markov Decision ProcessDocument83 pagesAI512/EE633: Reinforcement Learning: Lecture 2 - Markov Decision Process이강민No ratings yet
- Sequential Monte Carlo MethodsDocument6 pagesSequential Monte Carlo Methodsmemex1No ratings yet
- Dupiere Discrete ModelDocument14 pagesDupiere Discrete Modelabhiu1991No ratings yet
- 08 Bej137Document39 pages08 Bej137christoumpingfotsoNo ratings yet
- Zanchi - 2000 - Quantitative Human Gait Analysis PDFDocument13 pagesZanchi - 2000 - Quantitative Human Gait Analysis PDFAwatef FituriNo ratings yet
- Maria Kulikov A 2015Document6 pagesMaria Kulikov A 2015RAJNI KUMARINo ratings yet
- RBF NN-Based Backstepping Control For Strict Feedback Block Nonlinear System and Its ApplicationDocument9 pagesRBF NN-Based Backstepping Control For Strict Feedback Block Nonlinear System and Its ApplicationNors NoorNo ratings yet
- Heidari Et Al-1971-Water Resources ResearchDocument10 pagesHeidari Et Al-1971-Water Resources ResearchYutaka TakaharaNo ratings yet
- NoticeDocument18 pagesNoticeAlessandro Da Cruz GoncalvesNo ratings yet
- Mobile Robot Global Localization Using An Evolutionary MAP FilterDocument23 pagesMobile Robot Global Localization Using An Evolutionary MAP FilterjfrasconNo ratings yet
- Modul2ver2Document16 pagesModul2ver2NatanaelNo ratings yet
- s14 CompletareDocument14 pagess14 CompletareLaura NicoletaNo ratings yet
- SoftFRAC Matlab Library For RealizationDocument10 pagesSoftFRAC Matlab Library For RealizationKotadai Le ZKNo ratings yet
- Digital Signal Processing Question Bank 02Document24 pagesDigital Signal Processing Question Bank 02Mathi YuvarajanNo ratings yet
- ch6 Perceptron MLP PDFDocument31 pagesch6 Perceptron MLP PDFKrishnanNo ratings yet
- BSC Honours in Statistics: HSTS 203: Time Series Analysis University of ZimbabweDocument6 pagesBSC Honours in Statistics: HSTS 203: Time Series Analysis University of ZimbabweKeith Tanyaradzwa MushiningaNo ratings yet
- NoticeDocument22 pagesNoticeDaniel MoraNo ratings yet
- Fast Inverse Square RootDocument8 pagesFast Inverse Square RootMaxminlevelNo ratings yet
- Applied Neural Networks For Predicting Approximate Structural Response Behavior Using Learning and Design ExperienceDocument15 pagesApplied Neural Networks For Predicting Approximate Structural Response Behavior Using Learning and Design ExperienceRamprasad SrinivasanNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument8 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For Scientistssurvey obiharitaNo ratings yet
- Vmax.: Soft Adaptive Particle Swarm Algorithm For Large Scale OptimizationDocument5 pagesVmax.: Soft Adaptive Particle Swarm Algorithm For Large Scale OptimizationIndira SivakumarNo ratings yet
- Wooldridge InstrumentalVariablesEstimation 2005Document6 pagesWooldridge InstrumentalVariablesEstimation 2005DWI NOVA WIJAYANo ratings yet
- Digital Signal Processing Question Bank 01Document37 pagesDigital Signal Processing Question Bank 01Mathi YuvarajanNo ratings yet
- DVP MotionDocument42 pagesDVP MotionShabin MuhammedNo ratings yet
- Inference of Generalized Pareto Parameters Under Joint Two Sample Progressive Type - II Censoring SchemeDocument12 pagesInference of Generalized Pareto Parameters Under Joint Two Sample Progressive Type - II Censoring Schemeehab aliNo ratings yet
- New Indicators of ChaosDocument7 pagesNew Indicators of ChaosJesus Manuel Muñoz PachecoNo ratings yet
- Smooth Interpolation of Scattered Data by Local Thin Plate SplinewDocument9 pagesSmooth Interpolation of Scattered Data by Local Thin Plate Splinewalvaro prudenteNo ratings yet
- Extended Linearization Technique: GPS User Position UsingDocument4 pagesExtended Linearization Technique: GPS User Position Usingsurendiran123No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Commensurabilities among Lattices in PU (1,n). (AM-132), Volume 132From EverandCommensurabilities among Lattices in PU (1,n). (AM-132), Volume 132No ratings yet
- Reconstruction of 3D Trajectories For Performance Analysis in Table TennisDocument8 pagesReconstruction of 3D Trajectories For Performance Analysis in Table TennisDIEGO CAMILO PALOMINO RODRIGUEZNo ratings yet
- EagleEye 971230-FinallyDocument5 pagesEagleEye 971230-FinallyDIEGO CAMILO PALOMINO RODRIGUEZNo ratings yet
- Template Matching Based Tracking of Players in Indoor Team SportsDocument7 pagesTemplate Matching Based Tracking of Players in Indoor Team SportsDIEGO CAMILO PALOMINO RODRIGUEZNo ratings yet
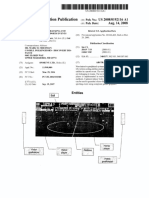
- Patent Application Publication (10) Pub. No.: US 2008/0192116 A1Document24 pagesPatent Application Publication (10) Pub. No.: US 2008/0192116 A1DIEGO CAMILO PALOMINO RODRIGUEZNo ratings yet
- Libya Hotel DFI May-June-17Document7 pagesLibya Hotel DFI May-June-17Maurizio SiepiNo ratings yet
- Canon Ir1600 Error CodesDocument11 pagesCanon Ir1600 Error Codesshelar_s4649100% (1)
- Fluid MechanicsDocument2 pagesFluid MechanicsjunquelalaNo ratings yet
- Habibi 2020Document15 pagesHabibi 2020Lekane nelsonNo ratings yet
- Chapter 4 - First Law of ThermodynamicsDocument29 pagesChapter 4 - First Law of ThermodynamicsUSAIMAH SHARIFNo ratings yet
- Revision - Chem - F4 Chapter 1-4Document8 pagesRevision - Chem - F4 Chapter 1-4HaziraAzlyNo ratings yet
- Wrought Titanium-6Aluminum-4Vanadium ELI (Extra Low Interstitial) Alloy For Surgical Implant Applications (UNS R56401)Document4 pagesWrought Titanium-6Aluminum-4Vanadium ELI (Extra Low Interstitial) Alloy For Surgical Implant Applications (UNS R56401)bishow100% (1)
- PDFDocument207 pagesPDFPaulmoNo ratings yet
- Physical Science - LESSON 3Document5 pagesPhysical Science - LESSON 3Jodie BayNo ratings yet
- An Index Finger Exoskeleton With Series Elastic Actuation For Rehabilitation: Design, Control and Performance CharacterizationDocument27 pagesAn Index Finger Exoskeleton With Series Elastic Actuation For Rehabilitation: Design, Control and Performance CharacterizationPhạm Quốc BảoNo ratings yet
- Pretreatment of WaterDocument42 pagesPretreatment of WaterPrudhvi RajNo ratings yet
- Tractive Effort (TE) and Tractive Resistance (TRDocument11 pagesTractive Effort (TE) and Tractive Resistance (TRDylan RigbyNo ratings yet
- Proact™ Digital Speed Control System For Models I and Ii: Installation and Operation ManualDocument68 pagesProact™ Digital Speed Control System For Models I and Ii: Installation and Operation ManualKawarauNo ratings yet
- Laboratory Report: Group 1 EappDocument24 pagesLaboratory Report: Group 1 EappNecee may lee Chua100% (1)
- Yokogawa CMZ700B - GyroCompass GS 30oct99 EDocument4 pagesYokogawa CMZ700B - GyroCompass GS 30oct99 EPatricio Campbell100% (1)
- Dosimetria Principios CLINACDocument36 pagesDosimetria Principios CLINACyumekiNo ratings yet
- Matrix of Linear Transform WRT Preferred BasisDocument6 pagesMatrix of Linear Transform WRT Preferred BasismartyNo ratings yet
- Explain The Meaning of A Mechtronic SystemDocument8 pagesExplain The Meaning of A Mechtronic Systemross bennettNo ratings yet
- Thermal Overload ProtectorDocument69 pagesThermal Overload ProtectorSai Printers100% (1)
- Aeroacoustic and Aerodynamic Optimization of Aircraft Propeller Blades - Marinus Et Al 2010Document17 pagesAeroacoustic and Aerodynamic Optimization of Aircraft Propeller Blades - Marinus Et Al 2010Wouterr GNo ratings yet
- Study of Defect Characteristics Essential For ET UT RTDocument58 pagesStudy of Defect Characteristics Essential For ET UT RTaldeanucu100% (2)
- Set - 3Document8 pagesSet - 3Game LoveNo ratings yet
- (2023) Design, Flow Characteristics and Performance Evaluation of Bioinspired Heat Exchangers Based On Triply Periodic Minimal SurfacesDocument13 pages(2023) Design, Flow Characteristics and Performance Evaluation of Bioinspired Heat Exchangers Based On Triply Periodic Minimal Surfaces오지윤No ratings yet
- CG P2-05 (Coulomb's Law)Document5 pagesCG P2-05 (Coulomb's Law)llllNo ratings yet
- 50 Years of Sound Control Room DesignDocument12 pages50 Years of Sound Control Room DesignArman Ul NasarNo ratings yet
- EDN Design Ideas 2008Document124 pagesEDN Design Ideas 2008chag1956100% (2)
- Basic Parameters For Pump Selection: A. System DetailsDocument62 pagesBasic Parameters For Pump Selection: A. System DetailsAravazhi Ramasami ThangarajNo ratings yet
- Matlab Project: Partial Derivative and ApplicationDocument20 pagesMatlab Project: Partial Derivative and ApplicationĐoàn ThịnhNo ratings yet