Download as pdf or txt
You might also like
- Mechanism of Machinery Velocity Analysis WorksheetDocument4 pagesMechanism of Machinery Velocity Analysis WorksheetAgare Tube0% (1)
- Home Test 1 PDFDocument3 pagesHome Test 1 PDFGooftilaaAniJiraachuunkooYesusiin0% (1)
- Tutorial 6Document4 pagesTutorial 6ArvinNo ratings yet
- Experiment 3: Conditions For EquilibriumDocument8 pagesExperiment 3: Conditions For EquilibriumToni Andrei CervalesNo ratings yet
- HW 4Document4 pagesHW 4earn owinoNo ratings yet
- Velocity and Acceleration NumericalDocument2 pagesVelocity and Acceleration NumericalSpidyNo ratings yet
- ME34ME1402 Dynamics of MachineryPractice Problems IIDocument6 pagesME34ME1402 Dynamics of MachineryPractice Problems IIizel valerianoNo ratings yet
- Practical Relative Velocity & Acceleration PDFDocument2 pagesPractical Relative Velocity & Acceleration PDFKeshav PagarNo ratings yet
- Relative Vel. and Accl. ProblemsDocument9 pagesRelative Vel. and Accl. ProblemsSanket KumbharNo ratings yet
- Assignment 2 Vel and Accln PDFDocument2 pagesAssignment 2 Vel and Accln PDFSarvesh ArbattiNo ratings yet
- Question Bank KOMDocument3 pagesQuestion Bank KOMMudit MaheshwariNo ratings yet
- Kinema TicsDocument2 pagesKinema TicsMuntoiaNo ratings yet
- Unit Wise 16 Mark QuestionsDocument29 pagesUnit Wise 16 Mark QuestionsPreethi SharmiNo ratings yet
- Lab 4 - U-Velocity and Acceleration AnalysisDocument2 pagesLab 4 - U-Velocity and Acceleration AnalysisAshutosh RautNo ratings yet
- Kinematics of Rigid BodyDocument4 pagesKinematics of Rigid BodyAbishek AdhikariNo ratings yet
- Mechanism of Machinery Velocity Analysis Worksheet PDF FreeDocument4 pagesMechanism of Machinery Velocity Analysis Worksheet PDF FreeHarsh VermaNo ratings yet
- Theory of MachineDocument2 pagesTheory of MachineRıshabhBhawarNo ratings yet
- Module 5 Kinematics of Rigid Bodies Common QuestionsDocument7 pagesModule 5 Kinematics of Rigid Bodies Common QuestionsLeo TallerNo ratings yet
- Module 5 Kinematics of Rigid Bodies Common QuestionsDocument7 pagesModule 5 Kinematics of Rigid Bodies Common QuestionsLeo TallerNo ratings yet
- Tutorial Chapter 5Document5 pagesTutorial Chapter 5wanpudinNo ratings yet
- VelocitytutorialDocument4 pagesVelocitytutorialManoz Thapa KajiNo ratings yet
- Mechanisms and Mechanical DesignDocument9 pagesMechanisms and Mechanical DesignNizam Institute of Engineering and Technology LibraryNo ratings yet
- Kinematics of Machinery QPDocument2 pagesKinematics of Machinery QPshiekziaNo ratings yet
- EJERCICIOS MECANISMOS - Javier Fuentes CDocument10 pagesEJERCICIOS MECANISMOS - Javier Fuentes CVictor MartinezNo ratings yet
- MENG 1004 Engineering Dynamics TutorialDocument3 pagesMENG 1004 Engineering Dynamics TutorialMidnight_dreamerNo ratings yet
- Quiz KomDocument5 pagesQuiz Komchellakutti tNo ratings yet
- Lec. 2 1Document5 pagesLec. 2 1easesaymichael02No ratings yet
- Velocity and Accelerations in Planar Mechanisms, Coriolis Component of AccelerationDocument63 pagesVelocity and Accelerations in Planar Mechanisms, Coriolis Component of AccelerationMPee Finance SumerpurNo ratings yet
- MME 2323-Mechanics of Machines April 2019 Marking SchemeDocument18 pagesMME 2323-Mechanics of Machines April 2019 Marking Schemecharles ondiekiNo ratings yet
- MEK453-Assignment 1 - (Oct 23-Feb 24)Document2 pagesMEK453-Assignment 1 - (Oct 23-Feb 24)Espresso LatteNo ratings yet
- ME 361 Dynamics of Machinery Mech. Dept./ IDL Knust Assignment I Unit 1Document6 pagesME 361 Dynamics of Machinery Mech. Dept./ IDL Knust Assignment I Unit 1pjrfhn7596No ratings yet
- 10 Exercise 5 Acceleration Analysis of MechanismsDocument5 pages10 Exercise 5 Acceleration Analysis of MechanismsMohamed MostafaNo ratings yet
- Chapter 5-MechanismDocument28 pagesChapter 5-MechanismDanielRaoNo ratings yet
- Problem SetDocument4 pagesProblem SetCalcifer da DemonNo ratings yet
- Assignment Questions Kinematics of Machines BTech 4thDocument16 pagesAssignment Questions Kinematics of Machines BTech 4thbiswas0060701No ratings yet
- Assignment 1Document2 pagesAssignment 1Kamalesh DfcNo ratings yet
- Applied Dynamics Tut 4Document6 pagesApplied Dynamics Tut 4सुनिल दाहालNo ratings yet
- Assignment 03 AE688Document7 pagesAssignment 03 AE688Mhmoud Al-TamimiNo ratings yet
- Tutorial-2 NewDocument2 pagesTutorial-2 NewAbhishek SharmaNo ratings yet
- T4 - R1 - Kinematics of RB in 2D PDFDocument5 pagesT4 - R1 - Kinematics of RB in 2D PDFNurul AsyilahNo ratings yet
- Linear Velocity, V, of A Point Is The Linear Displacement of That Point Per Unit Time. RecallDocument24 pagesLinear Velocity, V, of A Point Is The Linear Displacement of That Point Per Unit Time. RecallKarthikeyanRamanujamNo ratings yet
- Dynamics 04 Kinematics of Rigid Body 1Document9 pagesDynamics 04 Kinematics of Rigid Body 1Pongsakorn AjdchariyasakchaiNo ratings yet
- Practice Problems 1Document3 pagesPractice Problems 1Shivam JainNo ratings yet
- Mechanism WorksheetDocument8 pagesMechanism Worksheetnatnaelzelalem03No ratings yet
- Kom Unit-IIDocument21 pagesKom Unit-IIRamanathan DuraiNo ratings yet
- L-2/T-2/ME Date: 15/0112017Document16 pagesL-2/T-2/ME Date: 15/0112017Entertainment GamingNo ratings yet
- Velocity - Acceleration DiagramDocument9 pagesVelocity - Acceleration DiagramvisheshNo ratings yet
- Activities 1 DynamicsDocument6 pagesActivities 1 DynamicsDiego PulidoNo ratings yet
- University of Bahrain Department of Mechanical Engineering MENG 263 TUTORIAL # 5 (Chapter 5)Document4 pagesUniversity of Bahrain Department of Mechanical Engineering MENG 263 TUTORIAL # 5 (Chapter 5)Vivin MathewNo ratings yet
- Kinematics of MachineDocument25 pagesKinematics of MachineVidhiNo ratings yet
- Unit2&3 HRDocument60 pagesUnit2&3 HRtarasasankaNo ratings yet
- TUTORIAL 4 (Kinematics of RBs in Plane Motion)Document8 pagesTUTORIAL 4 (Kinematics of RBs in Plane Motion)Hareez FarhanNo ratings yet
- Acceleration in MechanismsDocument9 pagesAcceleration in Mechanismsapshah08No ratings yet
- Problem Sheet No 01Document3 pagesProblem Sheet No 01uzairNo ratings yet
- MCQ MechanismsDocument22 pagesMCQ Mechanismstvkbhanuprakash100% (1)
- 9A21506 Mechanisms & Mechanical DesignDocument8 pages9A21506 Mechanisms & Mechanical DesignsivabharathamurthyNo ratings yet
- Equilibrium of Machines and FlywheelDocument9 pagesEquilibrium of Machines and FlywheelAhmee MahmoudNo ratings yet
- Subduction Dynamics: From Mantle Flow to Mega DisastersFrom EverandSubduction Dynamics: From Mantle Flow to Mega DisastersGabriele MorraNo ratings yet
- Wind TurbinesDocument28 pagesWind Turbinesgangadharan tharumarNo ratings yet
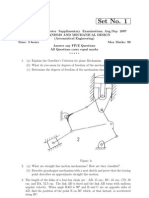
- Question Paper Code: 33021: Reg. No.Document3 pagesQuestion Paper Code: 33021: Reg. No.gangadharan tharumarNo ratings yet
- Unit - 1 - Variable StressesDocument1 pageUnit - 1 - Variable Stressesgangadharan tharumarNo ratings yet
- Question Paper Code:: Reg. No.Document4 pagesQuestion Paper Code:: Reg. No.gangadharan tharumarNo ratings yet
- Question Paper Code: Reg. No.Document3 pagesQuestion Paper Code: Reg. No.gangadharan tharumarNo ratings yet
- Question Paper CodeDocument3 pagesQuestion Paper Codegangadharan tharumarNo ratings yet
- (332-345) IE - ElectiveDocument14 pages(332-345) IE - Electivegangadharan tharumarNo ratings yet
- Courses of Study and Scheme of Assessment Me Industrial Engineering (Part Time)Document2 pagesCourses of Study and Scheme of Assessment Me Industrial Engineering (Part Time)gangadharan tharumarNo ratings yet
- Courses of Study and Scheme of Assessment Me Industrial EngineeringDocument2 pagesCourses of Study and Scheme of Assessment Me Industrial Engineeringgangadharan tharumarNo ratings yet
- 09 Science Notes Ch12 SoundDocument10 pages09 Science Notes Ch12 SoundHarshJangidNo ratings yet
- Kinetics Vs KinematicsDocument3 pagesKinetics Vs KinematicsRaj MallickNo ratings yet
- Postpro 2DDocument76 pagesPostpro 2DvucamtuNo ratings yet
- Jasim AssignmentDocument17 pagesJasim AssignmentAnnaya Ejaz 1220-FSS/BSSOC/F20No ratings yet
- Phy 105 Problem Set 1 Solutions 2012Document9 pagesPhy 105 Problem Set 1 Solutions 2012pbrowning9416No ratings yet
- Chapter - 17 Advent of Modern Physics PDFDocument8 pagesChapter - 17 Advent of Modern Physics PDFsingoj.bhargava charyNo ratings yet
- Intext Questions - 1: NCERT Solution For Class 9 Science Chapter 8 - MotionDocument14 pagesIntext Questions - 1: NCERT Solution For Class 9 Science Chapter 8 - MotionVaibhavNo ratings yet
- Pde PresentationDocument18 pagesPde PresentationsoniaNo ratings yet
- STPM Trial 2009 Phy Q&A (Johor)Document39 pagesSTPM Trial 2009 Phy Q&A (Johor)SimPorNo ratings yet
- Lecture 38 (Part 2) - Kepler - S Laws of Planetary MotionDocument11 pagesLecture 38 (Part 2) - Kepler - S Laws of Planetary Motionjameslicarte100471No ratings yet
- Gyroscopic Effect 2017 Journal of EnvironmentalDocument15 pagesGyroscopic Effect 2017 Journal of Environmentalaakash waychalNo ratings yet
- Kumpulan SoalDocument34 pagesKumpulan SoalDaraFelisiaArdhityasariNo ratings yet
- Chapter 8Document64 pagesChapter 8aungchanmyatpaingNo ratings yet
- Special Review For Mechanical Engineering: R 2i + 14 J + 5k F - 192.12 NDocument4 pagesSpecial Review For Mechanical Engineering: R 2i + 14 J + 5k F - 192.12 NRosalie cabeltesNo ratings yet
- Id054 Igcsedphy q02 ExqDocument3 pagesId054 Igcsedphy q02 Exqabudhabi123100% (1)
- Engineering MechanicsDocument18 pagesEngineering MechanicsSiva ChidambaramNo ratings yet
- Teacher ConceptsDocument2 pagesTeacher ConceptsMateo LobatoNo ratings yet
- P2 Forces and Motion Intermediate AnswersDocument10 pagesP2 Forces and Motion Intermediate AnswersdownendscienceNo ratings yet
- Lec 3 Rigid Body MotionDocument92 pagesLec 3 Rigid Body Motiondd23015No ratings yet
- Bend It Like Zhang Jike Spin in Table TennisDocument5 pagesBend It Like Zhang Jike Spin in Table Tennisphsieh007No ratings yet
- Resistive Force Theory: An Internet Book On Fluid DynamicsDocument4 pagesResistive Force Theory: An Internet Book On Fluid Dynamicsnbd491No ratings yet
- Co L, NP, AC, CGDocument8 pagesCo L, NP, AC, CGAnuj AroraNo ratings yet
- 2014 J1 H2 Promo P1B v2Document15 pages2014 J1 H2 Promo P1B v2dragon slayerNo ratings yet
- UntitledDocument15 pagesUntitledErik KantrowitzNo ratings yet
- Experiment 9 Moment of Inertia: Translational Kinetic Energy of The Driving Mass and The Rotational Kinetic Energy of TheDocument4 pagesExperiment 9 Moment of Inertia: Translational Kinetic Energy of The Driving Mass and The Rotational Kinetic Energy of Themuhammad faizal akbarNo ratings yet
- Syllabus - PH 101Document2 pagesSyllabus - PH 101Dr. Pradeep Kumar SharmaNo ratings yet
- Vibrations Lecture 1 Aulec - 01 Introduction (v-05)Document46 pagesVibrations Lecture 1 Aulec - 01 Introduction (v-05)AliRazaNo ratings yet
- Relativity Presentation - Deflection of LightDocument17 pagesRelativity Presentation - Deflection of Lightanon_109314934No ratings yet
- 4.5 Standing WavesDocument2 pages4.5 Standing WavespixelhoboNo ratings yet