
Balancing Cube: Thesis WIP
Balancing Cube: Thesis WIP
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Jangho Philippines Projects Presentation PDFDocument46 pagesJangho Philippines Projects Presentation PDFHao LiNo ratings yet
- Entegra and Envision: Installation Manual Primary Flight DisplayDocument87 pagesEntegra and Envision: Installation Manual Primary Flight DisplayEric Houvenaghel100% (2)
- DDFVDocument25 pagesDDFVJosé AdenilsonNo ratings yet
- Control System Design Based On Modern Embedded Systems 2Document9 pagesControl System Design Based On Modern Embedded Systems 2José AdenilsonNo ratings yet
- DC Motor Torque Control Using State EstimationDocument10 pagesDC Motor Torque Control Using State EstimationJosé AdenilsonNo ratings yet
- Respostas Esperadas - Lista 1 - Et34E: Méd Ef TH TH N N P 2Document1 pageRespostas Esperadas - Lista 1 - Et34E: Méd Ef TH TH N N P 2José AdenilsonNo ratings yet
- Industrial PaintingDocument312 pagesIndustrial Paintingyoners1691No ratings yet
- A202Document3 pagesA202Edisson CordovaNo ratings yet
- Saba Banana Production Guide PDFDocument3 pagesSaba Banana Production Guide PDFDavao Region Agriculture CooperativeNo ratings yet
- Selective Red Cell Variables in Chippiparai Hound Breeds of Tamil Nadu - A Pilot Study in 30 DogsDocument6 pagesSelective Red Cell Variables in Chippiparai Hound Breeds of Tamil Nadu - A Pilot Study in 30 DogsIndian Journal of Veterinary and Animal Sciences RNo ratings yet
- Transactions Apparatus Systems, Vol - PAS-98, No.1: 97 Ieee Power and Jan/Feb 1979Document13 pagesTransactions Apparatus Systems, Vol - PAS-98, No.1: 97 Ieee Power and Jan/Feb 1979awolNo ratings yet
- 8.protocols For Collecting EvidenceDocument21 pages8.protocols For Collecting EvidenceMugilan KrishnamurthyNo ratings yet
- Chemostat Recycle (Autosaved)Document36 pagesChemostat Recycle (Autosaved)Zeny Naranjo0% (1)
- Lab 5 - Ring AC DistributorDocument6 pagesLab 5 - Ring AC DistributorMuhammad AnasNo ratings yet
- REC EQ ChartDocument2 pagesREC EQ ChartAntonio F.M. PalloneNo ratings yet
- Factores de Virulencia Del Streptococcus PneumoniaeDocument7 pagesFactores de Virulencia Del Streptococcus PneumoniaeFranklin ArandaNo ratings yet
- Hilti Hit Hy 200 With Hit VDocument18 pagesHilti Hit Hy 200 With Hit VRobinReyndersNo ratings yet
- Flatland Lets Think About ItDocument6 pagesFlatland Lets Think About Itpj_lastkissNo ratings yet
- Tonga Tsunami Before and After Eruption - BBC NewsDocument13 pagesTonga Tsunami Before and After Eruption - BBC Newslae uneNo ratings yet
- A 304 - 11 Aceros Tipo HDocument48 pagesA 304 - 11 Aceros Tipo Halucard375No ratings yet
- Editorial Status Report - Dr. Y. Thiagarajan - JERRDocument3 pagesEditorial Status Report - Dr. Y. Thiagarajan - JERRThiaga RajanNo ratings yet
- Biological Disaster: InformationDocument4 pagesBiological Disaster: InformationBarani DharanNo ratings yet
- Dmitri Ivanovich MendeleevDocument4 pagesDmitri Ivanovich MendeleevEmmanuel OfforNo ratings yet
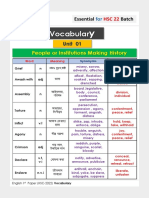
- Vocabulary HSC 22 PDFDocument28 pagesVocabulary HSC 22 PDFMadara Uchiha83% (6)
- Lab Activity 3 Hydraulics PDFDocument7 pagesLab Activity 3 Hydraulics PDFGregory MandarioNo ratings yet
- M2 Merge (Nirali+Singhgad+PurpleHat)Document896 pagesM2 Merge (Nirali+Singhgad+PurpleHat)Radhika GaikwadNo ratings yet
- Mapeh 7 Mya Assessment ToolDocument13 pagesMapeh 7 Mya Assessment ToolJnl RgndnNo ratings yet
- Audio CodecDocument3 pagesAudio CodecSandeep Kumar YadlapalliNo ratings yet
- Exp9 1Document3 pagesExp9 1Ashley De LeonNo ratings yet
- TZL1D L96 6000LM FST Mvolt 50K 80cri WHDocument6 pagesTZL1D L96 6000LM FST Mvolt 50K 80cri WHSolidNo ratings yet
- Druids: A Basic Fantasy RPG SupplementDocument10 pagesDruids: A Basic Fantasy RPG SupplementR_J_ValdebenitoNo ratings yet
- Urea CFL MsdsDocument8 pagesUrea CFL MsdsNawaitsuk IcuzNo ratings yet
- Secondary 6 FCE ExamPack SEVENDocument3 pagesSecondary 6 FCE ExamPack SEVENamtenistaNo ratings yet
- NDRRMC UPDATE Re SitreDocument31 pagesNDRRMC UPDATE Re SitreQuiapo ChurchNo ratings yet








































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Jangho Philippines Projects Presentation PDFDocument46 pagesJangho Philippines Projects Presentation PDFHao LiNo ratings yet
- Entegra and Envision: Installation Manual Primary Flight DisplayDocument87 pagesEntegra and Envision: Installation Manual Primary Flight DisplayEric Houvenaghel100% (2)
- DDFVDocument25 pagesDDFVJosé AdenilsonNo ratings yet
- Control System Design Based On Modern Embedded Systems 2Document9 pagesControl System Design Based On Modern Embedded Systems 2José AdenilsonNo ratings yet
- DC Motor Torque Control Using State EstimationDocument10 pagesDC Motor Torque Control Using State EstimationJosé AdenilsonNo ratings yet
- Respostas Esperadas - Lista 1 - Et34E: Méd Ef TH TH N N P 2Document1 pageRespostas Esperadas - Lista 1 - Et34E: Méd Ef TH TH N N P 2José AdenilsonNo ratings yet
- Industrial PaintingDocument312 pagesIndustrial Paintingyoners1691No ratings yet
- A202Document3 pagesA202Edisson CordovaNo ratings yet
- Saba Banana Production Guide PDFDocument3 pagesSaba Banana Production Guide PDFDavao Region Agriculture CooperativeNo ratings yet
- Selective Red Cell Variables in Chippiparai Hound Breeds of Tamil Nadu - A Pilot Study in 30 DogsDocument6 pagesSelective Red Cell Variables in Chippiparai Hound Breeds of Tamil Nadu - A Pilot Study in 30 DogsIndian Journal of Veterinary and Animal Sciences RNo ratings yet
- Transactions Apparatus Systems, Vol - PAS-98, No.1: 97 Ieee Power and Jan/Feb 1979Document13 pagesTransactions Apparatus Systems, Vol - PAS-98, No.1: 97 Ieee Power and Jan/Feb 1979awolNo ratings yet
- 8.protocols For Collecting EvidenceDocument21 pages8.protocols For Collecting EvidenceMugilan KrishnamurthyNo ratings yet
- Chemostat Recycle (Autosaved)Document36 pagesChemostat Recycle (Autosaved)Zeny Naranjo0% (1)
- Lab 5 - Ring AC DistributorDocument6 pagesLab 5 - Ring AC DistributorMuhammad AnasNo ratings yet
- REC EQ ChartDocument2 pagesREC EQ ChartAntonio F.M. PalloneNo ratings yet
- Factores de Virulencia Del Streptococcus PneumoniaeDocument7 pagesFactores de Virulencia Del Streptococcus PneumoniaeFranklin ArandaNo ratings yet
- Hilti Hit Hy 200 With Hit VDocument18 pagesHilti Hit Hy 200 With Hit VRobinReyndersNo ratings yet
- Flatland Lets Think About ItDocument6 pagesFlatland Lets Think About Itpj_lastkissNo ratings yet
- Tonga Tsunami Before and After Eruption - BBC NewsDocument13 pagesTonga Tsunami Before and After Eruption - BBC Newslae uneNo ratings yet
- A 304 - 11 Aceros Tipo HDocument48 pagesA 304 - 11 Aceros Tipo Halucard375No ratings yet
- Editorial Status Report - Dr. Y. Thiagarajan - JERRDocument3 pagesEditorial Status Report - Dr. Y. Thiagarajan - JERRThiaga RajanNo ratings yet
- Biological Disaster: InformationDocument4 pagesBiological Disaster: InformationBarani DharanNo ratings yet
- Dmitri Ivanovich MendeleevDocument4 pagesDmitri Ivanovich MendeleevEmmanuel OfforNo ratings yet
- Vocabulary HSC 22 PDFDocument28 pagesVocabulary HSC 22 PDFMadara Uchiha83% (6)
- Lab Activity 3 Hydraulics PDFDocument7 pagesLab Activity 3 Hydraulics PDFGregory MandarioNo ratings yet
- M2 Merge (Nirali+Singhgad+PurpleHat)Document896 pagesM2 Merge (Nirali+Singhgad+PurpleHat)Radhika GaikwadNo ratings yet
- Mapeh 7 Mya Assessment ToolDocument13 pagesMapeh 7 Mya Assessment ToolJnl RgndnNo ratings yet
- Audio CodecDocument3 pagesAudio CodecSandeep Kumar YadlapalliNo ratings yet
- Exp9 1Document3 pagesExp9 1Ashley De LeonNo ratings yet
- TZL1D L96 6000LM FST Mvolt 50K 80cri WHDocument6 pagesTZL1D L96 6000LM FST Mvolt 50K 80cri WHSolidNo ratings yet
- Druids: A Basic Fantasy RPG SupplementDocument10 pagesDruids: A Basic Fantasy RPG SupplementR_J_ValdebenitoNo ratings yet
- Urea CFL MsdsDocument8 pagesUrea CFL MsdsNawaitsuk IcuzNo ratings yet
- Secondary 6 FCE ExamPack SEVENDocument3 pagesSecondary 6 FCE ExamPack SEVENamtenistaNo ratings yet
- NDRRMC UPDATE Re SitreDocument31 pagesNDRRMC UPDATE Re SitreQuiapo ChurchNo ratings yet