
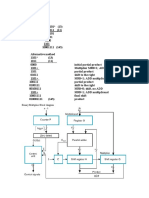
Booth S Multiplication Data Path Control Path
Booth S Multiplication Data Path Control Path
You might also like
- Cambridge English First Fs Sample Paper 3 Listening v2Document9 pagesCambridge English First Fs Sample Paper 3 Listening v2miriNo ratings yet
- PharmaDoc Pharmacy AppDocument109 pagesPharmaDoc Pharmacy AppUsama Malik100% (1)
- Ge 118-Great Books - FM 31 Final ExaminationDocument9 pagesGe 118-Great Books - FM 31 Final ExaminationKrisha PiocoNo ratings yet
- Google Webmaster Guidelines 2020Document7 pagesGoogle Webmaster Guidelines 2020V TNo ratings yet
- Pub - The Cambridge Companion To George Eliot Cambridge PDFDocument268 pagesPub - The Cambridge Companion To George Eliot Cambridge PDFMartínNo ratings yet
- PaloAlto - CustomAppSignaturesDocument13 pagesPaloAlto - CustomAppSignaturesyqsecond100% (1)
- Booth's Multiplication (Data Path + Control Path)Document19 pagesBooth's Multiplication (Data Path + Control Path)Bhavya Madan100% (1)
- BoothDocument29 pagesBoothgurbeer_sandhu_15No ratings yet
- COA Unit 2Document25 pagesCOA Unit 2Shivam KumarNo ratings yet
- Chapter 4 Computer Arithmetic: 4.1 Integer RepresentationDocument10 pagesChapter 4 Computer Arithmetic: 4.1 Integer RepresentationLui PascherNo ratings yet
- Booth AlgorithemDocument4 pagesBooth AlgorithemdatalogdigitalNo ratings yet
- Running Addition ON Partial-Products (Multiplication)Document16 pagesRunning Addition ON Partial-Products (Multiplication)Niel Roel VelascoNo ratings yet
- Tutorial 09Document4 pagesTutorial 09atarek06283No ratings yet
- COA Module4Document26 pagesCOA Module4Aditya Dhanaraj KunduNo ratings yet
- William Stallings Computer Organization and Architecture 8 Edition Computer ArithmeticDocument26 pagesWilliam Stallings Computer Organization and Architecture 8 Edition Computer ArithmeticAqib abdullahNo ratings yet
- Computer Arithmetic 1. Addition and Subtraction of Unsigned NumbersDocument19 pagesComputer Arithmetic 1. Addition and Subtraction of Unsigned NumbersSai TrilokNo ratings yet
- Booth's Multiplication AlgorithmDocument27 pagesBooth's Multiplication AlgorithmNikita vermaNo ratings yet
- CST131 Tutorial3 UsmDocument5 pagesCST131 Tutorial3 UsmLim ScNo ratings yet
- Vlsi Iiest SBDocument45 pagesVlsi Iiest SBUshaRaniDashNo ratings yet
- Division Algorithms: Vikas Maheshkar MNNIT, AllahabadDocument11 pagesDivision Algorithms: Vikas Maheshkar MNNIT, AllahabadAbhishek TayalNo ratings yet
- Pipelining - Basic Principles, Classification of Pipeline ProcessorsDocument30 pagesPipelining - Basic Principles, Classification of Pipeline ProcessorsJoel K SanthoshNo ratings yet
- COA Mod 3Document25 pagesCOA Mod 3Rosh Roy GeorgeNo ratings yet
- 6-Booth''s Multiplication and Booth''s Modified Algorithm-18-01-2024Document14 pages6-Booth''s Multiplication and Booth''s Modified Algorithm-18-01-2024Baladhithya TNo ratings yet
- FALLSEM2018-19 CSE2001 TH SJT502 VL2018191005001 Reference Material I 2.4 Boothalg1Document24 pagesFALLSEM2018-19 CSE2001 TH SJT502 VL2018191005001 Reference Material I 2.4 Boothalg1Abhradeep Nag 16BEE0087No ratings yet
- Computer Arithmetic: Part II: Integer Arithmetic & Floating PointDocument30 pagesComputer Arithmetic: Part II: Integer Arithmetic & Floating PointtesfuNo ratings yet
- M Binary Digits, We Can Represent The 2: Signed Number Representations CS221, MockDocument11 pagesM Binary Digits, We Can Represent The 2: Signed Number Representations CS221, MockramadeviNo ratings yet
- CD Module4 Part2Document13 pagesCD Module4 Part2Aditya Dhanaraj KunduNo ratings yet
- Vishal BoothDocument12 pagesVishal BoothKishor SarawadekarNo ratings yet
- Mulitpliers Dividers Supp4 PDFDocument15 pagesMulitpliers Dividers Supp4 PDFavichalNo ratings yet
- Restoring Maths ProblemDocument3 pagesRestoring Maths ProblemramaNo ratings yet
- CH 10Document37 pagesCH 10Ayush UpretyNo ratings yet
- Non-Restoring Division AlgorithmDocument4 pagesNon-Restoring Division AlgorithmAbhay SinghNo ratings yet
- COA Unit 2Document57 pagesCOA Unit 2a2021cse7814No ratings yet
- Multiplication & Division AlgorithmsDocument27 pagesMultiplication & Division AlgorithmsPramod SrinivasanNo ratings yet
- Subtract SubtractorDocument3 pagesSubtract SubtractorJannel SalvaNo ratings yet
- Booth Multiplication PDFDocument3 pagesBooth Multiplication PDFkbmn2No ratings yet
- Four-Bit Modulo-16 D-Flipflop Counter: Play Around With The Circuit To See That It WorksDocument4 pagesFour-Bit Modulo-16 D-Flipflop Counter: Play Around With The Circuit To See That It WorksFajri NaomiNo ratings yet
- QUESTION BANK UNIT 2 - Computer Organization and ArchitectureDocument7 pagesQUESTION BANK UNIT 2 - Computer Organization and Architecture09 laxmikant doijodeNo ratings yet
- Week 3Document26 pagesWeek 3syed mushtaherNo ratings yet
- "Digital Logic Design": Lecture # 3Document41 pages"Digital Logic Design": Lecture # 3Hi RaNo ratings yet
- General Register Organization and Stack OrganizationDocument7 pagesGeneral Register Organization and Stack Organizationsweta singhNo ratings yet
- Non-Restoring Division AlgorithmDocument5 pagesNon-Restoring Division AlgorithmMayukh ChatterjeeNo ratings yet
- SSCE Shift MultDocument4 pagesSSCE Shift MultDhinesh DhamodarNo ratings yet
- Number Systems 2Document14 pagesNumber Systems 2arfaaliNo ratings yet
- 3639CH1-Fundamentals of Logic DesignDocument74 pages3639CH1-Fundamentals of Logic DesignNitish JhaNo ratings yet
- Arithmetic Logic Unit: CSE 429 Digital System DesignDocument42 pagesArithmetic Logic Unit: CSE 429 Digital System DesignNafisa YeasminNo ratings yet
- Submitted To: Submitted byDocument8 pagesSubmitted To: Submitted byrajput12345No ratings yet
- Computer Organization and Assembly Language: Lecture 5 & 6 Computer Arithmetic Integer Representation, Integer ArithmeticDocument29 pagesComputer Organization and Assembly Language: Lecture 5 & 6 Computer Arithmetic Integer Representation, Integer ArithmeticDarwin VargasNo ratings yet
- AVR Lecture 4Document32 pagesAVR Lecture 4معتز العجيليNo ratings yet
- CH 8 StallingsDocument38 pagesCH 8 StallingsRifah TasniaNo ratings yet
- CH 2Document25 pagesCH 2eyobeshete01No ratings yet
- Working of Turing MachineDocument4 pagesWorking of Turing MachineranaateeqNo ratings yet
- Booths AlgoDocument23 pagesBooths AlgoSanjog ShresthaNo ratings yet
- Basic Concept: MultiplierDocument9 pagesBasic Concept: MultiplierFlorin UngureanuNo ratings yet
- Presentation On Multiplication and DivisionDocument10 pagesPresentation On Multiplication and DivisionM. R. KHAN DIPUNo ratings yet
- Computer Organization & Architecture Unit-2: Arithmetic and Logic UnitDocument25 pagesComputer Organization & Architecture Unit-2: Arithmetic and Logic Unitshubham singhalNo ratings yet
- Chapter One (Multiplier)Document8 pagesChapter One (Multiplier)FuziOnNo ratings yet
- Digital Electronics - Lesson 3 ComplementsDocument36 pagesDigital Electronics - Lesson 3 ComplementsJanette C.No ratings yet
- Computer Arithmetic in Computer Organization and ArchitectureDocument41 pagesComputer Arithmetic in Computer Organization and ArchitectureEswin AngelNo ratings yet
- ALU Inputs and OutputsDocument63 pagesALU Inputs and OutputsattappNo ratings yet
- LTE Breakdown CounterDocument58 pagesLTE Breakdown Counterqaisar ayubNo ratings yet
- AI EMPOWERED ANOMALY DETECTION Technique For Cyber Network SecurityDocument33 pagesAI EMPOWERED ANOMALY DETECTION Technique For Cyber Network Securityqaisar ayubNo ratings yet
- Class C Amplifier1Document8 pagesClass C Amplifier1qaisar ayubNo ratings yet
- Assign 2 DSD-1Document12 pagesAssign 2 DSD-1qaisar ayubNo ratings yet
- Communication Skills: Qaisar AyubDocument11 pagesCommunication Skills: Qaisar Ayubqaisar ayubNo ratings yet
- Normal RoadDocument1 pageNormal Roadqaisar ayubNo ratings yet
- Bachelor of Science (Biochemistry)Document44 pagesBachelor of Science (Biochemistry)Shravani SalunkheNo ratings yet
- Ancient History As A Term Refers To The Aggregate of Past EventsDocument5 pagesAncient History As A Term Refers To The Aggregate of Past EventsRajshekhar BoseNo ratings yet
- Solución EvAU Madrid Inglés 2023 Junio Opción A CienciasDocument3 pagesSolución EvAU Madrid Inglés 2023 Junio Opción A Cienciasceliabernal06No ratings yet
- MATLAB Simulation of AC Voltage ControllersDocument3 pagesMATLAB Simulation of AC Voltage Controllersaarumugam_rajendran100% (3)
- 10th English PTA Model Question Papers 6 Sets 2023 2024Document24 pages10th English PTA Model Question Papers 6 Sets 2023 2024mralan9843No ratings yet
- Ad ConfigDocument80 pagesAd Configanon_947124837No ratings yet
- AdjectiveDocument2 pagesAdjectivehaydenNo ratings yet
- V6 R2012 XDocument36 pagesV6 R2012 XasepNo ratings yet
- LiouVille's TheoremDocument3 pagesLiouVille's TheoremMuhammad kawish iqbal100% (1)
- Stack With Queues PDFDocument3 pagesStack With Queues PDFUsamaNo ratings yet
- Unified Library Application Unit 5Document11 pagesUnified Library Application Unit 5charan vedantamNo ratings yet
- Ubnd Thành Phố Đà Lạt Phòng Giáo Dục Và Đào Tạo Kỳ Thi Chọn Học Sinh Giỏi Cấp Thành Phố LỚP 9 THCS - NĂM HỌC 2019 -2020Document5 pagesUbnd Thành Phố Đà Lạt Phòng Giáo Dục Và Đào Tạo Kỳ Thi Chọn Học Sinh Giỏi Cấp Thành Phố LỚP 9 THCS - NĂM HỌC 2019 -2020Son CaoNo ratings yet
- DLL - Mathematics 2 - Q1 - W4Document11 pagesDLL - Mathematics 2 - Q1 - W4Jessell Mae Paña LorinNo ratings yet
- Palle Sree Nikhil - Bballb - 2021Document7 pagesPalle Sree Nikhil - Bballb - 2021Nikhil BobbyNo ratings yet
- Level Three COC Exam Sample Type Questions DBMSDocument6 pagesLevel Three COC Exam Sample Type Questions DBMSsileshi alelign88% (16)
- Reading 5B 26th AugustDocument1 pageReading 5B 26th AugustFelix JosephNo ratings yet
- Literary Devices NotesDocument2 pagesLiterary Devices Notesbenedetta.monteraNo ratings yet
- 05 Network ProtocolsDocument45 pages05 Network ProtocolsCheryl Marie AlimbaNo ratings yet
- Fast Learner Action PlanDocument2 pagesFast Learner Action PlanEDEM IRISH S. RIVERANo ratings yet
- Planning A Trip - AssignmentDocument2 pagesPlanning A Trip - Assignmentdulce crissNo ratings yet
- Mathnd Mod World Mod 4Document5 pagesMathnd Mod World Mod 4erickson hernanNo ratings yet
- Lyx/Latex: Modern Approach To Technical PublicationDocument15 pagesLyx/Latex: Modern Approach To Technical PublicationxourceNo ratings yet
- More Undecidable Problems: Rice's Theorem Post's Correspondence Problem Some Real ProblemsDocument60 pagesMore Undecidable Problems: Rice's Theorem Post's Correspondence Problem Some Real ProblemsLalalalalalaNo ratings yet
- Combined Resume Rep List 12Document3 pagesCombined Resume Rep List 12api-534415380No ratings yet

























































































Download as pdf or txt
You might also like
- Cambridge English First Fs Sample Paper 3 Listening v2Document9 pagesCambridge English First Fs Sample Paper 3 Listening v2miriNo ratings yet
- PharmaDoc Pharmacy AppDocument109 pagesPharmaDoc Pharmacy AppUsama Malik100% (1)
- Ge 118-Great Books - FM 31 Final ExaminationDocument9 pagesGe 118-Great Books - FM 31 Final ExaminationKrisha PiocoNo ratings yet
- Google Webmaster Guidelines 2020Document7 pagesGoogle Webmaster Guidelines 2020V TNo ratings yet
- Pub - The Cambridge Companion To George Eliot Cambridge PDFDocument268 pagesPub - The Cambridge Companion To George Eliot Cambridge PDFMartínNo ratings yet
- PaloAlto - CustomAppSignaturesDocument13 pagesPaloAlto - CustomAppSignaturesyqsecond100% (1)
- Booth's Multiplication (Data Path + Control Path)Document19 pagesBooth's Multiplication (Data Path + Control Path)Bhavya Madan100% (1)
- BoothDocument29 pagesBoothgurbeer_sandhu_15No ratings yet
- COA Unit 2Document25 pagesCOA Unit 2Shivam KumarNo ratings yet
- Chapter 4 Computer Arithmetic: 4.1 Integer RepresentationDocument10 pagesChapter 4 Computer Arithmetic: 4.1 Integer RepresentationLui PascherNo ratings yet
- Booth AlgorithemDocument4 pagesBooth AlgorithemdatalogdigitalNo ratings yet
- Running Addition ON Partial-Products (Multiplication)Document16 pagesRunning Addition ON Partial-Products (Multiplication)Niel Roel VelascoNo ratings yet
- Tutorial 09Document4 pagesTutorial 09atarek06283No ratings yet
- COA Module4Document26 pagesCOA Module4Aditya Dhanaraj KunduNo ratings yet
- William Stallings Computer Organization and Architecture 8 Edition Computer ArithmeticDocument26 pagesWilliam Stallings Computer Organization and Architecture 8 Edition Computer ArithmeticAqib abdullahNo ratings yet
- Computer Arithmetic 1. Addition and Subtraction of Unsigned NumbersDocument19 pagesComputer Arithmetic 1. Addition and Subtraction of Unsigned NumbersSai TrilokNo ratings yet
- Booth's Multiplication AlgorithmDocument27 pagesBooth's Multiplication AlgorithmNikita vermaNo ratings yet
- CST131 Tutorial3 UsmDocument5 pagesCST131 Tutorial3 UsmLim ScNo ratings yet
- Vlsi Iiest SBDocument45 pagesVlsi Iiest SBUshaRaniDashNo ratings yet
- Division Algorithms: Vikas Maheshkar MNNIT, AllahabadDocument11 pagesDivision Algorithms: Vikas Maheshkar MNNIT, AllahabadAbhishek TayalNo ratings yet
- Pipelining - Basic Principles, Classification of Pipeline ProcessorsDocument30 pagesPipelining - Basic Principles, Classification of Pipeline ProcessorsJoel K SanthoshNo ratings yet
- COA Mod 3Document25 pagesCOA Mod 3Rosh Roy GeorgeNo ratings yet
- 6-Booth''s Multiplication and Booth''s Modified Algorithm-18-01-2024Document14 pages6-Booth''s Multiplication and Booth''s Modified Algorithm-18-01-2024Baladhithya TNo ratings yet
- FALLSEM2018-19 CSE2001 TH SJT502 VL2018191005001 Reference Material I 2.4 Boothalg1Document24 pagesFALLSEM2018-19 CSE2001 TH SJT502 VL2018191005001 Reference Material I 2.4 Boothalg1Abhradeep Nag 16BEE0087No ratings yet
- Computer Arithmetic: Part II: Integer Arithmetic & Floating PointDocument30 pagesComputer Arithmetic: Part II: Integer Arithmetic & Floating PointtesfuNo ratings yet
- M Binary Digits, We Can Represent The 2: Signed Number Representations CS221, MockDocument11 pagesM Binary Digits, We Can Represent The 2: Signed Number Representations CS221, MockramadeviNo ratings yet
- CD Module4 Part2Document13 pagesCD Module4 Part2Aditya Dhanaraj KunduNo ratings yet
- Vishal BoothDocument12 pagesVishal BoothKishor SarawadekarNo ratings yet
- Mulitpliers Dividers Supp4 PDFDocument15 pagesMulitpliers Dividers Supp4 PDFavichalNo ratings yet
- Restoring Maths ProblemDocument3 pagesRestoring Maths ProblemramaNo ratings yet
- CH 10Document37 pagesCH 10Ayush UpretyNo ratings yet
- Non-Restoring Division AlgorithmDocument4 pagesNon-Restoring Division AlgorithmAbhay SinghNo ratings yet
- COA Unit 2Document57 pagesCOA Unit 2a2021cse7814No ratings yet
- Multiplication & Division AlgorithmsDocument27 pagesMultiplication & Division AlgorithmsPramod SrinivasanNo ratings yet
- Subtract SubtractorDocument3 pagesSubtract SubtractorJannel SalvaNo ratings yet
- Booth Multiplication PDFDocument3 pagesBooth Multiplication PDFkbmn2No ratings yet
- Four-Bit Modulo-16 D-Flipflop Counter: Play Around With The Circuit To See That It WorksDocument4 pagesFour-Bit Modulo-16 D-Flipflop Counter: Play Around With The Circuit To See That It WorksFajri NaomiNo ratings yet
- QUESTION BANK UNIT 2 - Computer Organization and ArchitectureDocument7 pagesQUESTION BANK UNIT 2 - Computer Organization and Architecture09 laxmikant doijodeNo ratings yet
- Week 3Document26 pagesWeek 3syed mushtaherNo ratings yet
- "Digital Logic Design": Lecture # 3Document41 pages"Digital Logic Design": Lecture # 3Hi RaNo ratings yet
- General Register Organization and Stack OrganizationDocument7 pagesGeneral Register Organization and Stack Organizationsweta singhNo ratings yet
- Non-Restoring Division AlgorithmDocument5 pagesNon-Restoring Division AlgorithmMayukh ChatterjeeNo ratings yet
- SSCE Shift MultDocument4 pagesSSCE Shift MultDhinesh DhamodarNo ratings yet
- Number Systems 2Document14 pagesNumber Systems 2arfaaliNo ratings yet
- 3639CH1-Fundamentals of Logic DesignDocument74 pages3639CH1-Fundamentals of Logic DesignNitish JhaNo ratings yet
- Arithmetic Logic Unit: CSE 429 Digital System DesignDocument42 pagesArithmetic Logic Unit: CSE 429 Digital System DesignNafisa YeasminNo ratings yet
- Submitted To: Submitted byDocument8 pagesSubmitted To: Submitted byrajput12345No ratings yet
- Computer Organization and Assembly Language: Lecture 5 & 6 Computer Arithmetic Integer Representation, Integer ArithmeticDocument29 pagesComputer Organization and Assembly Language: Lecture 5 & 6 Computer Arithmetic Integer Representation, Integer ArithmeticDarwin VargasNo ratings yet
- AVR Lecture 4Document32 pagesAVR Lecture 4معتز العجيليNo ratings yet
- CH 8 StallingsDocument38 pagesCH 8 StallingsRifah TasniaNo ratings yet
- CH 2Document25 pagesCH 2eyobeshete01No ratings yet
- Working of Turing MachineDocument4 pagesWorking of Turing MachineranaateeqNo ratings yet
- Booths AlgoDocument23 pagesBooths AlgoSanjog ShresthaNo ratings yet
- Basic Concept: MultiplierDocument9 pagesBasic Concept: MultiplierFlorin UngureanuNo ratings yet
- Presentation On Multiplication and DivisionDocument10 pagesPresentation On Multiplication and DivisionM. R. KHAN DIPUNo ratings yet
- Computer Organization & Architecture Unit-2: Arithmetic and Logic UnitDocument25 pagesComputer Organization & Architecture Unit-2: Arithmetic and Logic Unitshubham singhalNo ratings yet
- Chapter One (Multiplier)Document8 pagesChapter One (Multiplier)FuziOnNo ratings yet
- Digital Electronics - Lesson 3 ComplementsDocument36 pagesDigital Electronics - Lesson 3 ComplementsJanette C.No ratings yet
- Computer Arithmetic in Computer Organization and ArchitectureDocument41 pagesComputer Arithmetic in Computer Organization and ArchitectureEswin AngelNo ratings yet
- ALU Inputs and OutputsDocument63 pagesALU Inputs and OutputsattappNo ratings yet
- LTE Breakdown CounterDocument58 pagesLTE Breakdown Counterqaisar ayubNo ratings yet
- AI EMPOWERED ANOMALY DETECTION Technique For Cyber Network SecurityDocument33 pagesAI EMPOWERED ANOMALY DETECTION Technique For Cyber Network Securityqaisar ayubNo ratings yet
- Class C Amplifier1Document8 pagesClass C Amplifier1qaisar ayubNo ratings yet
- Assign 2 DSD-1Document12 pagesAssign 2 DSD-1qaisar ayubNo ratings yet
- Communication Skills: Qaisar AyubDocument11 pagesCommunication Skills: Qaisar Ayubqaisar ayubNo ratings yet
- Normal RoadDocument1 pageNormal Roadqaisar ayubNo ratings yet
- Bachelor of Science (Biochemistry)Document44 pagesBachelor of Science (Biochemistry)Shravani SalunkheNo ratings yet
- Ancient History As A Term Refers To The Aggregate of Past EventsDocument5 pagesAncient History As A Term Refers To The Aggregate of Past EventsRajshekhar BoseNo ratings yet
- Solución EvAU Madrid Inglés 2023 Junio Opción A CienciasDocument3 pagesSolución EvAU Madrid Inglés 2023 Junio Opción A Cienciasceliabernal06No ratings yet
- MATLAB Simulation of AC Voltage ControllersDocument3 pagesMATLAB Simulation of AC Voltage Controllersaarumugam_rajendran100% (3)
- 10th English PTA Model Question Papers 6 Sets 2023 2024Document24 pages10th English PTA Model Question Papers 6 Sets 2023 2024mralan9843No ratings yet
- Ad ConfigDocument80 pagesAd Configanon_947124837No ratings yet
- AdjectiveDocument2 pagesAdjectivehaydenNo ratings yet
- V6 R2012 XDocument36 pagesV6 R2012 XasepNo ratings yet
- LiouVille's TheoremDocument3 pagesLiouVille's TheoremMuhammad kawish iqbal100% (1)
- Stack With Queues PDFDocument3 pagesStack With Queues PDFUsamaNo ratings yet
- Unified Library Application Unit 5Document11 pagesUnified Library Application Unit 5charan vedantamNo ratings yet
- Ubnd Thành Phố Đà Lạt Phòng Giáo Dục Và Đào Tạo Kỳ Thi Chọn Học Sinh Giỏi Cấp Thành Phố LỚP 9 THCS - NĂM HỌC 2019 -2020Document5 pagesUbnd Thành Phố Đà Lạt Phòng Giáo Dục Và Đào Tạo Kỳ Thi Chọn Học Sinh Giỏi Cấp Thành Phố LỚP 9 THCS - NĂM HỌC 2019 -2020Son CaoNo ratings yet
- DLL - Mathematics 2 - Q1 - W4Document11 pagesDLL - Mathematics 2 - Q1 - W4Jessell Mae Paña LorinNo ratings yet
- Palle Sree Nikhil - Bballb - 2021Document7 pagesPalle Sree Nikhil - Bballb - 2021Nikhil BobbyNo ratings yet
- Level Three COC Exam Sample Type Questions DBMSDocument6 pagesLevel Three COC Exam Sample Type Questions DBMSsileshi alelign88% (16)
- Reading 5B 26th AugustDocument1 pageReading 5B 26th AugustFelix JosephNo ratings yet
- Literary Devices NotesDocument2 pagesLiterary Devices Notesbenedetta.monteraNo ratings yet
- 05 Network ProtocolsDocument45 pages05 Network ProtocolsCheryl Marie AlimbaNo ratings yet
- Fast Learner Action PlanDocument2 pagesFast Learner Action PlanEDEM IRISH S. RIVERANo ratings yet
- Planning A Trip - AssignmentDocument2 pagesPlanning A Trip - Assignmentdulce crissNo ratings yet
- Mathnd Mod World Mod 4Document5 pagesMathnd Mod World Mod 4erickson hernanNo ratings yet
- Lyx/Latex: Modern Approach To Technical PublicationDocument15 pagesLyx/Latex: Modern Approach To Technical PublicationxourceNo ratings yet
- More Undecidable Problems: Rice's Theorem Post's Correspondence Problem Some Real ProblemsDocument60 pagesMore Undecidable Problems: Rice's Theorem Post's Correspondence Problem Some Real ProblemsLalalalalalaNo ratings yet
- Combined Resume Rep List 12Document3 pagesCombined Resume Rep List 12api-534415380No ratings yet