Download as pdf or txt
You might also like
- Fem BitsDocument9 pagesFem BitsSrinivasaReddyM64% (22)
- User Manual Promotal - AUTOCLAVES MIDMARK B6-B18-B23 PDFDocument144 pagesUser Manual Promotal - AUTOCLAVES MIDMARK B6-B18-B23 PDFVlady Lopez CastroNo ratings yet
- Neev Academy: IB MYP Sciences (Grade 06) A Babul Das, Ritika Shah, Manju NairDocument14 pagesNeev Academy: IB MYP Sciences (Grade 06) A Babul Das, Ritika Shah, Manju NairBindu M PillaiNo ratings yet
- Multiple Choice Questions: Page 1 of 11Document11 pagesMultiple Choice Questions: Page 1 of 11priya dharshiniNo ratings yet
- Structure Analysis Made Easy Notes 2019 PDFDocument285 pagesStructure Analysis Made Easy Notes 2019 PDFSaud Affan100% (1)
- JEn Questions Bank CE TOS-6Document9 pagesJEn Questions Bank CE TOS-6Bhagwat BhajipaleNo ratings yet
- CE 382 L11 - Force MethodDocument10 pagesCE 382 L11 - Force Methodbaizubiraji100% (1)
- Structure Analysis WB (Combine File) 17-11-2021Document43 pagesStructure Analysis WB (Combine File) 17-11-2021alishaNo ratings yet
- 05-Theory of StructureDocument8 pages05-Theory of StructureAadaesh VermaNo ratings yet
- 2-Design For Static LoadDocument3 pages2-Design For Static LoadAmrit ShankarNo ratings yet
- Sa-2 II Mid Bit PaperDocument2 pagesSa-2 II Mid Bit Paperayyappa eNo ratings yet
- Unit 2 Influence Lines Statically Determinate Trusses: StructureDocument24 pagesUnit 2 Influence Lines Statically Determinate Trusses: StructureHeaven SinghNo ratings yet
- Question Papers For ME 2017-18Document55 pagesQuestion Papers For ME 2017-18JeremyNo ratings yet
- Multiple Choice Questions: D. A Is False But R Is TrueDocument11 pagesMultiple Choice Questions: D. A Is False But R Is Truepriya dharshiniNo ratings yet
- CBSE Class 12 Engineering Graphic Marking Scheme Question Paper 2019-20Document7 pagesCBSE Class 12 Engineering Graphic Marking Scheme Question Paper 2019-20ManikyaMayankNo ratings yet
- Aakash CPP 02Document32 pagesAakash CPP 02Shlok DhootNo ratings yet
- Multiple Choice Questions (UNIT4)Document11 pagesMultiple Choice Questions (UNIT4)priya dharshiniNo ratings yet
- 1 - SomDocument82 pages1 - SomJegan KrishnaNo ratings yet
- Bending Theory 01 2013Document6 pagesBending Theory 01 2013GunnerZedNo ratings yet
- Additional Objective Type QuestionDocument32 pagesAdditional Objective Type QuestionThinnai TheniNo ratings yet
- Unit 02Document25 pagesUnit 02N.Shiney JosephNo ratings yet
- CE 302: Structural Analysis II (2018-2019) : Practice Questions 1Document3 pagesCE 302: Structural Analysis II (2018-2019) : Practice Questions 1TOBINo ratings yet
- Section-A: Theory of Thin Plates & Shells EXAM - MARCH-2021Document2 pagesSection-A: Theory of Thin Plates & Shells EXAM - MARCH-2021Gayatri Projects LimitedNo ratings yet
- 3-Design For Fluctuating LoadDocument2 pages3-Design For Fluctuating LoadAmrit ShankarNo ratings yet
- Multiple Choice Questions: B. Shear CentreDocument13 pagesMultiple Choice Questions: B. Shear Centrepriya dharshiniNo ratings yet
- Notes All Civil Eng. Subjects-1.pdf - 1Document315 pagesNotes All Civil Eng. Subjects-1.pdf - 1Srikanth BhaskaraNo ratings yet
- Discrete Topic in MathsDocument2 pagesDiscrete Topic in MathsShatabbdi SsinhaNo ratings yet
- Mos PDFDocument24 pagesMos PDFChandini Suman SahooNo ratings yet
- 03-Unit and Dimension (Question) 2 (55-60)Document7 pages03-Unit and Dimension (Question) 2 (55-60)rahul singhNo ratings yet
- Structural 3 Q PDocument14 pagesStructural 3 Q PKusum KalitaNo ratings yet
- MCQDocument8 pagesMCQShubham100% (1)
- Plates and SlabsDocument63 pagesPlates and SlabsMelkamu DemewezNo ratings yet
- Chapter10 Testbank PDFDocument11 pagesChapter10 Testbank PDFLuckyNo ratings yet
- A) Flexibility Matrix Is A Square Symmetrical Matrix B) Stiffness Matrix Is A Square Symmetrical Matrix C) Both (A) and (B) D) None of The AboveDocument2 pagesA) Flexibility Matrix Is A Square Symmetrical Matrix B) Stiffness Matrix Is A Square Symmetrical Matrix C) Both (A) and (B) D) None of The AboveSri Rama ChandNo ratings yet
- C ConstructionIssues FanellaDocument4 pagesC ConstructionIssues FanellaAndreas RagusNo ratings yet
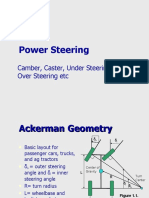
- Power Steering: Camber, Caster, Under Steering, Over Steering EtcDocument63 pagesPower Steering: Camber, Caster, Under Steering, Over Steering EtcShravan Bunny DuaNo ratings yet
- Trusses: aAE c2AEDocument16 pagesTrusses: aAE c2AEdeepak Kumar singhNo ratings yet
- ESA MCQDocument3 pagesESA MCQvamsikrishnamamidiNo ratings yet
- Ackermann Power SteeringDocument62 pagesAckermann Power SteeringDeepak SawantNo ratings yet
- Rotation DTS-5Document3 pagesRotation DTS-5Antony RoshanNo ratings yet
- Nodia and Company: Gate Solved Paper Civil Engineering 2001Document18 pagesNodia and Company: Gate Solved Paper Civil Engineering 2001saravan1891No ratings yet
- TD MC2023Document15 pagesTD MC2023markmya2No ratings yet
- Xvii - . - . ,: List, of Fig - of Moment WithoutDocument1 pageXvii - . - . ,: List, of Fig - of Moment WithoutjosNo ratings yet
- Conic Section Qs Doc2Document10 pagesConic Section Qs Doc2Nedheeish KhumaranNo ratings yet
- Mathematics-I Objective Questions Unit-IDocument13 pagesMathematics-I Objective Questions Unit-ISrî HárshàNo ratings yet
- Bending StressDocument66 pagesBending StressNathaniel TayNo ratings yet
- Fixed Beam S RamamruthamDocument11 pagesFixed Beam S RamamruthamasdadNo ratings yet
- Chemistry Solid State SheetDocument14 pagesChemistry Solid State SheetFarhan Jawed KhanNo ratings yet
- Mech 2102Document4 pagesMech 2102kingsukbarman07No ratings yet
- Shear Force and Bending Moment Diagram - DPP 01 (By Satyajeet Sir)Document9 pagesShear Force and Bending Moment Diagram - DPP 01 (By Satyajeet Sir)amanblueoriginNo ratings yet
- Edited - RAJ MODAK - Assignment - CE604BDocument1 pageEdited - RAJ MODAK - Assignment - CE604BRAJ MODAKNo ratings yet
- Plate 1 Structural TheoryDocument2 pagesPlate 1 Structural TheoryBLANCE, MICHAEL O.No ratings yet
- Civil &mechanical (Som) QuesDocument3 pagesCivil &mechanical (Som) QuesAdyasa SahooNo ratings yet
- (I) (Id Hours: Jio (C)Document6 pages(I) (Id Hours: Jio (C)Arjun OrcsNo ratings yet
- Ce 2001Document17 pagesCe 2001Raj Kumar100% (1)
- Aisi Cfsd86Document4 pagesAisi Cfsd86Mahaveer Janapala100% (1)
- On Projective Motion in A Symmetric and Projective Symmetric Finsler ManifoldDocument10 pagesOn Projective Motion in A Symmetric and Projective Symmetric Finsler ManifoldTJPRC PublicationsNo ratings yet
- Ques. DETERMINANTSDocument4 pagesQues. DETERMINANTSYASH KUMARNo ratings yet
- Sec. 1.4 Damping Force: U F C FDocument1 pageSec. 1.4 Damping Force: U F C FMehdi RahmatiNo ratings yet
- Seminar ReportDocument18 pagesSeminar ReportAman Kumar SinghNo ratings yet
- Tai Lieu Bien Tan Frecon Fr150a EN-1Document125 pagesTai Lieu Bien Tan Frecon Fr150a EN-1Ankhuong NguyenNo ratings yet
- Physics: Pearson Edexcel Level 3 GCEDocument32 pagesPhysics: Pearson Edexcel Level 3 GCEIanNo ratings yet
- Final Hydro Generator ComponentsDocument38 pagesFinal Hydro Generator ComponentsSandeep KumarNo ratings yet
- Detection and Evaluation of Discontinuities by Contact Pulse-Echo Straight-Beam Ultrasonic MethodsDocument7 pagesDetection and Evaluation of Discontinuities by Contact Pulse-Echo Straight-Beam Ultrasonic MethodsEric GozzerNo ratings yet
- 1 Forces and Motion C2b Part II - Moments & Newtons 3rd: iGCSE Edexcel 1-9 - MR PowellDocument42 pages1 Forces and Motion C2b Part II - Moments & Newtons 3rd: iGCSE Edexcel 1-9 - MR Powellmahsan abbasNo ratings yet
- CentricutDocument2 pagesCentricutIlian AvramovNo ratings yet
- Manual de Partes Finisher InternoDocument41 pagesManual de Partes Finisher InternoAlex RendonNo ratings yet
- Mt105a 2023 Pass Paper No TipsDocument5 pagesMt105a 2023 Pass Paper No Tipslosika.mosupiNo ratings yet
- Laura N. Lowes, Dawn E. Lehman, and Carson BakerDocument23 pagesLaura N. Lowes, Dawn E. Lehman, and Carson BakerCarsonBakerNo ratings yet
- STYLE AG-4911 4# Eva Closed Cell Foam: Typical Properties ofDocument2 pagesSTYLE AG-4911 4# Eva Closed Cell Foam: Typical Properties ofArrow LazarusNo ratings yet
- En 3GBP082470-BSKDocument3 pagesEn 3GBP082470-BSKramy alfonsNo ratings yet
- Problem Set in Power System 2Document3 pagesProblem Set in Power System 2Andrew AlterNo ratings yet
- HPH103 - Waves and Optics 1 - Lecture # 7-1Document16 pagesHPH103 - Waves and Optics 1 - Lecture # 7-1Praise NehumambiNo ratings yet
- Solutions - Allowable StressesDocument12 pagesSolutions - Allowable StressesJob BumanlagNo ratings yet
- Sabik Marine-Datasheet m660 2020Document2 pagesSabik Marine-Datasheet m660 2020purchasingNo ratings yet
- AASHTO Supplement, Rigid Pavement DesignDocument91 pagesAASHTO Supplement, Rigid Pavement DesignAlvaro HerbasNo ratings yet
- Structural Steel Shapes: Standard Specification ForDocument3 pagesStructural Steel Shapes: Standard Specification ForNgoc BuiNo ratings yet
- Planning Modules For Power Distribution in BuildingsDocument28 pagesPlanning Modules For Power Distribution in BuildingsSaad rehmanNo ratings yet
- CE404 03 Stilling BasinsDocument10 pagesCE404 03 Stilling BasinsAbhishek Shah100% (1)
- Photoelectric Effect Lab - (Platinum)Document2 pagesPhotoelectric Effect Lab - (Platinum)Manozer MensahNo ratings yet
- Fortified Relaxor Ferroelectricity of Rare Earth Substituted 4 Layered Babi Re Ti O (Re La, PR, ND, and SM) Aurivillius CompoundsDocument19 pagesFortified Relaxor Ferroelectricity of Rare Earth Substituted 4 Layered Babi Re Ti O (Re La, PR, ND, and SM) Aurivillius CompoundsTio Putra WendariNo ratings yet
- Sterilisation and ContainmentDocument33 pagesSterilisation and ContainmentKaycee ChirendaNo ratings yet
- Mcqs-Metals and Non Metals by Reva MamDocument17 pagesMcqs-Metals and Non Metals by Reva MamRavinder Singh ThakurNo ratings yet
- Thermodynamics - DPP-04 (Of Lec-07) - Arjuna NEET 2024Document3 pagesThermodynamics - DPP-04 (Of Lec-07) - Arjuna NEET 2024qiraanmasood44No ratings yet
- What Are The Color Bands and Applications of A 4.7 K ResistorDocument7 pagesWhat Are The Color Bands and Applications of A 4.7 K ResistorjackNo ratings yet
- "Simulation of Asynchronous Motor Using MATLAB": Submitted To: Prof. GOKULAKRISHNAN GDocument35 pages"Simulation of Asynchronous Motor Using MATLAB": Submitted To: Prof. GOKULAKRISHNAN GAditi DixitNo ratings yet
- Difference Between Slip Ring and Squirrel Cage Induction MotorDocument1 pageDifference Between Slip Ring and Squirrel Cage Induction MotorRoger JohnNo ratings yet