Download as pdf or txt
You might also like
- The Engineering of RELIABLE Embedded Systems-2016 PDFDocument65 pagesThe Engineering of RELIABLE Embedded Systems-2016 PDFMariano OlivaresNo ratings yet
- WT 60.000Document43 pagesWT 60.000Lucky Greentech75% (4)
- PA330-en-USER GUIDEDocument35 pagesPA330-en-USER GUIDElifgarygarcia50% (2)
- LP7510 Manual PDFDocument32 pagesLP7510 Manual PDFIvan Agreda SalvadorNo ratings yet
- BACKFLUSH-WM MovementsDocument5 pagesBACKFLUSH-WM MovementsscribdatlantaNo ratings yet
- General Description: PT650F Instruction Manual 1Document10 pagesGeneral Description: PT650F Instruction Manual 1AbubackerNo ratings yet
- PT650f e 2002Document67 pagesPT650f e 2002lehahai100% (4)
- Dual Output Ac Current - Voltage TransducerDocument7 pagesDual Output Ac Current - Voltage TransducerMagendran SurulivelNo ratings yet
- AD100 Series AC Drive Operation ManualDocument67 pagesAD100 Series AC Drive Operation ManualSegundo Tumalie100% (1)
- Manual TCW122B-WDDocument14 pagesManual TCW122B-WDoskarfabianNo ratings yet
- DVP-MC I Mul 20120507Document20 pagesDVP-MC I Mul 20120507Rafael ZilsNo ratings yet
- Manual Tuxon C Uo3rDocument64 pagesManual Tuxon C Uo3relkin carrilloNo ratings yet
- Manual ITP16Document12 pagesManual ITP16Thang VuNo ratings yet
- PLC CatlogDocument7 pagesPLC CatlogWaruna PasanNo ratings yet
- Manual Book - EnglishDocument11 pagesManual Book - EnglishAlvaro SucceNo ratings yet
- BX 2 EN Manual 101112Document50 pagesBX 2 EN Manual 101112Ibrahim ALhaj Gharib100% (2)
- LX3V 2adi BDDocument6 pagesLX3V 2adi BDnicolas.tohme121No ratings yet
- CHI MEI Pt650d Instruction ManualDocument63 pagesCHI MEI Pt650d Instruction ManualBalanças EstaticaNo ratings yet
- Operating Manual: Power / Phase Angle / Power Factor TransducerDocument44 pagesOperating Manual: Power / Phase Angle / Power Factor TransducerpadmawarNo ratings yet
- SV-iP5A or IV5 User ManualDocument25 pagesSV-iP5A or IV5 User ManualTechnology HelperNo ratings yet
- Manual de Usuario BBG-INDUSTRY30Document32 pagesManual de Usuario BBG-INDUSTRY30Ser InfinitoNo ratings yet
- VT 12040 ManualDocument7 pagesVT 12040 ManualCristi CatalinNo ratings yet
- InteliLite 4 AMF 20 Datasheet - 2Document4 pagesInteliLite 4 AMF 20 Datasheet - 2Cj BongNo ratings yet
- InteliLite 4 AMF 20 Datasheet - 2Document4 pagesInteliLite 4 AMF 20 Datasheet - 2Cj BongNo ratings yet
- InteliLite 4 AMF 20 Datasheet - 2Document4 pagesInteliLite 4 AMF 20 Datasheet - 2Cj BongNo ratings yet
- InteliLite 4 AMF 20 Datasheet - 2Document4 pagesInteliLite 4 AMF 20 Datasheet - 2Cj BongNo ratings yet
- Combivert ManualDocument20 pagesCombivert Manualfabianespinozag100% (2)
- 03 Downstream GFB Series Operation ManualDocument12 pages03 Downstream GFB Series Operation ManualDamian VillarNo ratings yet
- WEG CFW500 Ethernet Communication Plug in Module 10003091420 Installation Guide en Es PTDocument24 pagesWEG CFW500 Ethernet Communication Plug in Module 10003091420 Installation Guide en Es PTRodrigoNo ratings yet
- InteliATS2 50 - Datasheet - 2023-03Document4 pagesInteliATS2 50 - Datasheet - 2023-03zanoveliNo ratings yet
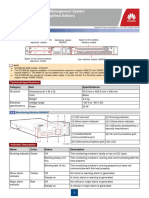
- SCC800-B2 SmartSite Management System Installation Guide (Simplified Edition)Document9 pagesSCC800-B2 SmartSite Management System Installation Guide (Simplified Edition)Hamza OsamaNo ratings yet
- DHODT-V4 User ManualDocument13 pagesDHODT-V4 User ManualEko IndriatmokoNo ratings yet
- Manual ULTIMOS VARIADORES BANDA 2022.4.19Document11 pagesManual ULTIMOS VARIADORES BANDA 2022.4.19produccion multipackNo ratings yet
- T-920 User Manual v1.2Document11 pagesT-920 User Manual v1.2Aung Kyaw OoNo ratings yet
- Conexiones - BazánDocument3 pagesConexiones - BazánJavier Vidal GonzalesNo ratings yet
- Idm-6830 and Idm-7842dag (C)Document22 pagesIdm-6830 and Idm-7842dag (C)BOsy Ying LoNo ratings yet
- NDS3306I 6 in 1 ISDB-T Modulator User Manual 2018.11.26Document24 pagesNDS3306I 6 in 1 ISDB-T Modulator User Manual 2018.11.26jhunniorNo ratings yet
- M3LCR ManualDocument12 pagesM3LCR ManualNovinistanbul TurkluNo ratings yet
- AR1710 کاتالوگ UserDocument20 pagesAR1710 کاتالوگ UserSHAKIBA OMIDINo ratings yet
- SPC 1000 ManualDocument9 pagesSPC 1000 ManualEyosyas NathanNo ratings yet
- DCP-20 Genset Control ManualDocument65 pagesDCP-20 Genset Control Manualandy habibiNo ratings yet
- HJ RF Module: Spec V1.0Document9 pagesHJ RF Module: Spec V1.0Khalil AwawdaNo ratings yet
- General Specifications CO-920-01: GS48D20Z01-00E-NDocument4 pagesGeneral Specifications CO-920-01: GS48D20Z01-00E-N赵先生No ratings yet
- lxc900 VDocument1 pagelxc900 VGaurav MahajanNo ratings yet
- LV-Hub Communication HUB Product Manual (V2.1) 20190808 48VDocument12 pagesLV-Hub Communication HUB Product Manual (V2.1) 20190808 48VJosé Vicente González VivasNo ratings yet
- tcw122b CM Remote Io Module User Manual r4.8Document19 pagestcw122b CM Remote Io Module User Manual r4.8Wai Leong WongNo ratings yet
- 4CH HDMI To ISDB-T Encoder Modulator User's Manual PDFDocument28 pages4CH HDMI To ISDB-T Encoder Modulator User's Manual PDFVladimir PeñarandaNo ratings yet
- LX3V-2DAI-BD User Manual: Website: Skype: FCWKKJ Phone: 86-591-87868869 QQ: 1043098682 Technical ForumDocument7 pagesLX3V-2DAI-BD User Manual: Website: Skype: FCWKKJ Phone: 86-591-87868869 QQ: 1043098682 Technical ForumElgin GineteNo ratings yet
- Honeywell XNX Spec SheetDocument2 pagesHoneywell XNX Spec SheetNico TabanNo ratings yet
- JZ20 R31 Especificacao TecnicaDocument4 pagesJZ20 R31 Especificacao TecnicaMarco KauaNo ratings yet
- Shenzhen LED Color Opto Electronic Co.,ltd: SK6812MINIDocument12 pagesShenzhen LED Color Opto Electronic Co.,ltd: SK6812MINIhnguyen913No ratings yet
- TDAX023100Document3 pagesTDAX023100Abdul KurniadiNo ratings yet
- DLC2-USB(ETH)-V3.2 User Manual 20210117Document12 pagesDLC2-USB(ETH)-V3.2 User Manual 20210117pawellm96No ratings yet
- Cio 116 Data Sheet 4921240524 UkDocument10 pagesCio 116 Data Sheet 4921240524 Uksk034jy081No ratings yet
- RXL104067-B DatasheetDocument23 pagesRXL104067-B DatasheetChetan DadhaniyaNo ratings yet
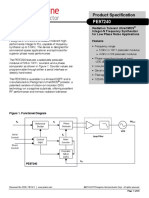
- Pe 97240 DsDocument21 pagesPe 97240 Dskhanafzaal2576No ratings yet
- Dkg-605 Alarm Annunciator Unit: DKG-605 User Manual V-04Document9 pagesDkg-605 Alarm Annunciator Unit: DKG-605 User Manual V-04Happy Photography Page 0No ratings yet
- XNX Specs Universal TransmiterDocument2 pagesXNX Specs Universal TransmiterRudin Fahrudin RahmanNo ratings yet
- Smart Motor Devices: Programmable Step Motor Controller Smsd-4.2Lan and Smsd-8.0LanDocument12 pagesSmart Motor Devices: Programmable Step Motor Controller Smsd-4.2Lan and Smsd-8.0LanIvanNo ratings yet
- Analog Dialogue Volume 46, Number 1: Analog Dialogue, #5From EverandAnalog Dialogue Volume 46, Number 1: Analog Dialogue, #5Rating: 5 out of 5 stars5/5 (1)
- Radio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142From EverandRadio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142No ratings yet
- Adc0801 PDFDocument36 pagesAdc0801 PDFroi_sihombingNo ratings yet
- Lad - Rap User ManualDocument56 pagesLad - Rap User Manualзавир мансуровNo ratings yet
- Architecture Guide SafeX3u9 ENG V1aDocument27 pagesArchitecture Guide SafeX3u9 ENG V1afsussanNo ratings yet
- The Future of Enterprise Resource PlanningDocument2 pagesThe Future of Enterprise Resource PlanningMohsin KhanNo ratings yet
- Keyboard Shortcuts - Perform Common Firefox Tasks Quickly Firefox HelpDocument13 pagesKeyboard Shortcuts - Perform Common Firefox Tasks Quickly Firefox HelpEmilianoNo ratings yet
- Batch Basics Three Levels Doing Batch System Structure Phase Logic Interface PricingDocument21 pagesBatch Basics Three Levels Doing Batch System Structure Phase Logic Interface Pricingtricky777No ratings yet
- SD Series Floating Ball Valve: Maximum Allowable Stem Torque Values For SD Series Product Data SheetDocument3 pagesSD Series Floating Ball Valve: Maximum Allowable Stem Torque Values For SD Series Product Data SheetVinayNo ratings yet
- Upload Download So PV 33 enDocument43 pagesUpload Download So PV 33 enHerry SusiloNo ratings yet
- Yokogawa CW121Document3 pagesYokogawa CW121Pithoon UngnaparatNo ratings yet
- Erp Case MNGMTDocument7 pagesErp Case MNGMTsharkNo ratings yet
- Advanced Trigonometry Calculator - User Guide PDFDocument32 pagesAdvanced Trigonometry Calculator - User Guide PDFMarco FeiteiraNo ratings yet
- SVG in Epub With Adobe InDesignDocument3 pagesSVG in Epub With Adobe InDesignLuke_RNo ratings yet
- Design of An Intelligent and Efficient Light Control SystemDocument4 pagesDesign of An Intelligent and Efficient Light Control SystemATSNo ratings yet
- INTD0511 EN RM v1.2Document6 pagesINTD0511 EN RM v1.2Pelekis ElectronicsNo ratings yet
- List of Computer File Extensions and Their MeaningDocument3 pagesList of Computer File Extensions and Their MeaningCHAABINo ratings yet
- PawnsDocument9 pagesPawnsalphabeta1729No ratings yet
- Classification of AlgorithmDocument4 pagesClassification of AlgorithmselciyaNo ratings yet
- XII CS Chapter Data Structures NotesDocument4 pagesXII CS Chapter Data Structures NotesSourabh MehtoNo ratings yet
- Scikit RF PDFDocument321 pagesScikit RF PDFGarry RFNo ratings yet
- Chapter-8 (Controlling Services and Daemons)Document2 pagesChapter-8 (Controlling Services and Daemons)Kyar Nyo AyeNo ratings yet
- The Ghost in The Virtual Machine A Reference To References: Bob LeeDocument75 pagesThe Ghost in The Virtual Machine A Reference To References: Bob LeeBob LeeNo ratings yet
- Install GrafanaDocument8 pagesInstall Grafanaamri kurniawanNo ratings yet
- CERAGON Seminar Next Generation - IP RadioDocument132 pagesCERAGON Seminar Next Generation - IP Radiodonny supriatnaNo ratings yet
- D80194GC10 PDFDocument3 pagesD80194GC10 PDFvineetNo ratings yet
- CN Exp 4Document4 pagesCN Exp 4AdityaNo ratings yet
- Minor Project Report-OSPF ChampDocument5 pagesMinor Project Report-OSPF Champsmrutiranjan1991100% (1)
- Real Time ClockDocument4 pagesReal Time ClockResearchDesignLabNo ratings yet
- Cloud Computing Unit 1Document23 pagesCloud Computing Unit 1kejagoNo ratings yet