Download as doc, pdf, or txt
You might also like
- Safety Inspection Before Taxi: Ryanair Boeing 737-Ng Normal ChecklistDocument2 pagesSafety Inspection Before Taxi: Ryanair Boeing 737-Ng Normal Checklistfelixadler100% (6)
- Aptlabs Prolab NotesDocument338 pagesAptlabs Prolab Notesmehmet100% (1)
- JCB 135 155 175 190 205 150t 190t 205t Skid Steer Loader Robot Service Repair Manual Instant PDFDocument5 pagesJCB 135 155 175 190 205 150t 190t 205t Skid Steer Loader Robot Service Repair Manual Instant PDFdouahchia rached67% (3)
- DR 160 Manual de Serviços (Ingles) HJ150-10CDocument273 pagesDR 160 Manual de Serviços (Ingles) HJ150-10CCharles SaraivaNo ratings yet
- Guidance Equations For LaunchDocument40 pagesGuidance Equations For Launchedkyle99No ratings yet
- JACM - Volume 1 - Issue 1 - Pages 10-16Document7 pagesJACM - Volume 1 - Issue 1 - Pages 10-16Raksha AroraNo ratings yet
- Parameter Identification of Vehicles Movingon Continuous BridgesDocument21 pagesParameter Identification of Vehicles Movingon Continuous BridgesAugusto César Santos PeixotoNo ratings yet
- Estimate Sprung MassDocument6 pagesEstimate Sprung MassAdriánRangelNo ratings yet
- 347 Binder1 - RideDocument8 pages347 Binder1 - RideReek BhattacharyaNo ratings yet
- Mathematical Modelling of Engineering Problems: Received: 25 October 2021 Accepted: 16 March 2022Document10 pagesMathematical Modelling of Engineering Problems: Received: 25 October 2021 Accepted: 16 March 2022Hailush TgNo ratings yet
- 286926639microsoft Word - Copy of IJSR4Document8 pages286926639microsoft Word - Copy of IJSR4rasim_m1146No ratings yet
- Freq. Response ParametersDocument4 pagesFreq. Response ParametersPPMNo ratings yet
- Operational Modal Analysis of Tyre Road Interaction Using Abaqus Explicit and Operational Modal AnalysisDocument14 pagesOperational Modal Analysis of Tyre Road Interaction Using Abaqus Explicit and Operational Modal AnalysismatmeanNo ratings yet
- Applsci 07 01027 v2 PDFDocument15 pagesApplsci 07 01027 v2 PDFHusain KanchwalaNo ratings yet
- Mass Unbalance in An Met CourseDocument10 pagesMass Unbalance in An Met CourseRam ChandranNo ratings yet
- Cycling Comfort On Different Road SurfacesDocument6 pagesCycling Comfort On Different Road SurfacesxandinnhooNo ratings yet
- An Introduction To Transfer Path AnalysisDocument23 pagesAn Introduction To Transfer Path AnalysissantiagoNo ratings yet
- A Simple Method For Measuring Power, Force, Velocity Properties, and Mechanical Effectiveness in Sprint RunningDocument11 pagesA Simple Method For Measuring Power, Force, Velocity Properties, and Mechanical Effectiveness in Sprint RunningapapirioNo ratings yet
- 4 UnbalanceDocument9 pages4 Unbalancerola mohamedNo ratings yet
- Active Suspension System With Preview ControlDocument5 pagesActive Suspension System With Preview Controlrudey18No ratings yet
- Results Exploration and Decision Making With NVH-CAE ApplicationsDocument16 pagesResults Exploration and Decision Making With NVH-CAE ApplicationsIndranil BhattacharyyaNo ratings yet
- MMMMMMMMDocument13 pagesMMMMMMMMBashir AlsadawiNo ratings yet
- Study On Jacobian, Singularity and Kinematics Sensitivity of TheDocument24 pagesStudy On Jacobian, Singularity and Kinematics Sensitivity of TheMaziarNo ratings yet
- Monte Carlo Simulation of Staging DynamicsDocument16 pagesMonte Carlo Simulation of Staging DynamicsDan StroescuNo ratings yet
- 10 18038-Aubtda 340798-351378Document11 pages10 18038-Aubtda 340798-351378ayesha siddiqaNo ratings yet
- Ride Comfort of A 4 DOF Nonlinear Heavy Vehicle SuspensionDocument6 pagesRide Comfort of A 4 DOF Nonlinear Heavy Vehicle Suspensionmme58105No ratings yet
- How To Evaluate BoatsDocument14 pagesHow To Evaluate BoatsJuniorJavier Olivo FarreraNo ratings yet
- Manuscript FileDocument35 pagesManuscript Fileد. ثائر جبار نتيشNo ratings yet
- Bicycle CrankDocument19 pagesBicycle CrankJulian David SantanaNo ratings yet
- Sensor-Less Field Oriented Control of Wind TurbineDocument11 pagesSensor-Less Field Oriented Control of Wind TurbinegiovanniNo ratings yet
- Applied Mathematics and Mechanics: (English Edition)Document16 pagesApplied Mathematics and Mechanics: (English Edition)Anonymous IqCUJjOINo ratings yet
- Samozino2016 HalDocument12 pagesSamozino2016 HalRyafoj Cutbert BalanayNo ratings yet
- Over Ground Running Speed For Inertial SensorsDocument6 pagesOver Ground Running Speed For Inertial SensorsrashslashNo ratings yet
- Effect On The Vibration of The Suspension System: L. DahilDocument4 pagesEffect On The Vibration of The Suspension System: L. DahilNoor BasheerNo ratings yet
- TLFL Using Travelling Waves and Extreme Learning MachineDocument7 pagesTLFL Using Travelling Waves and Extreme Learning MachineGabriel MessiasNo ratings yet
- Case Studies in Mechanical Systems and Signal ProcessingDocument11 pagesCase Studies in Mechanical Systems and Signal Processingtheerapat patkaewNo ratings yet
- 10 Ijmperdapr201710Document28 pages10 Ijmperdapr201710TJPRC PublicationsNo ratings yet
- 2014 On-Line Algebraic Identification of Eccentricity Parameters in Active Rotor-Bearing SystemsDocument8 pages2014 On-Line Algebraic Identification of Eccentricity Parameters in Active Rotor-Bearing SystemsAgustín Erasmo Juárez MartínezNo ratings yet
- Astm E1170Document10 pagesAstm E1170Mutyaba Johnson100% (1)
- An Improved Rotating HF Signal Injection Method Based On FIR Filters For State Estimation of BPMSM Sensorless ControlDocument10 pagesAn Improved Rotating HF Signal Injection Method Based On FIR Filters For State Estimation of BPMSM Sensorless Controlيبسسي سيسيسيNo ratings yet
- Vibration Prediction in Switched Reluctance Motors With Transfer Function Identification From Shaker and Force Hammer TestsDocument8 pagesVibration Prediction in Switched Reluctance Motors With Transfer Function Identification From Shaker and Force Hammer TestsKaran ShahNo ratings yet
- Transfer Matrix Method To Vibration Analysis of Rotors With Coupler OffsetsDocument13 pagesTransfer Matrix Method To Vibration Analysis of Rotors With Coupler OffsetsPablo Marcelo Garnica TejerinaNo ratings yet
- Analysis of Planar Vehicle CollisionsDocument16 pagesAnalysis of Planar Vehicle CollisionsIsabela Torres De MeloNo ratings yet
- Entropy: High-Speed Spindle Fault Diagnosis With The Empirical Mode Decomposition and Multiscale Entropy MethodDocument14 pagesEntropy: High-Speed Spindle Fault Diagnosis With The Empirical Mode Decomposition and Multiscale Entropy MethodEstebanRiveraNo ratings yet
- New Insights Into Sprint Biomechanics and DetDocument17 pagesNew Insights Into Sprint Biomechanics and DetAslee AbushawashiNo ratings yet
- Experimental Study On Acceleration Measurement of Ship Wave MotionsDocument4 pagesExperimental Study On Acceleration Measurement of Ship Wave MotionsJean David ChanNo ratings yet
- Anti-Slip Traction Control of Railway Vehicle Based On Estimated Wheel-Rail Contact ConditionDocument5 pagesAnti-Slip Traction Control of Railway Vehicle Based On Estimated Wheel-Rail Contact ConditionIrfan Ahmed HalepotoNo ratings yet
- Harvesting - Suspension - JVA FinalDocument8 pagesHarvesting - Suspension - JVA Finaljerf0281No ratings yet
- Analysis of Detent Torque in Hybrid Stepping Motors: Jonathan U AgberDocument7 pagesAnalysis of Detent Torque in Hybrid Stepping Motors: Jonathan U AgbertheijesNo ratings yet
- Bcg/'/Mtg/Ba by 8Az/Ax @bhag 6 (Tetvgxe/Fg/Vf Hf/Az 8Kcxe/'Xagt - "Ah'Xe/Vt - 4at - LF/FDocument19 pagesBcg/'/Mtg/Ba by 8Az/Ax @bhag 6 (Tetvgxe/Fg/Vf Hf/Az 8Kcxe/'Xagt - "Ah'Xe/Vt - 4at - LF/FSanthosh KumarNo ratings yet
- Study On Ride Comfort of Tractor With Tandem Suspension Based On Multi-Body System DynamicsDocument23 pagesStudy On Ride Comfort of Tractor With Tandem Suspension Based On Multi-Body System DynamicsAlexandre Assis Rezende SantosNo ratings yet
- Train Trajectory Optimisation of ATO Systems For Metro LinesDocument6 pagesTrain Trajectory Optimisation of ATO Systems For Metro LinesOsa OlabyNo ratings yet
- Vibrations in Passenger Bus and Its AnalysisDocument4 pagesVibrations in Passenger Bus and Its AnalysisImpact Journals100% (1)
- A5 A Transverse Beam VIB ANALYZERDocument24 pagesA5 A Transverse Beam VIB ANALYZERAkash BargeNo ratings yet
- JournalPaperMassGrade FinalDocument28 pagesJournalPaperMassGrade FinalHasan MahmoodNo ratings yet
- International Roughness Index: Relationship To Other Measures of Roughness and Riding QualityDocument10 pagesInternational Roughness Index: Relationship To Other Measures of Roughness and Riding Qualitychristian villarroelNo ratings yet
- A Numerical 2D Simulation of Part Motion in Vibratory Bowl Feeders by Discrete Element MethodDocument12 pagesA Numerical 2D Simulation of Part Motion in Vibratory Bowl Feeders by Discrete Element Methodbuithang31122001No ratings yet
- A MRAS-based Stator Resistance and Speed Estimation For Sensorless IPMSMDocument15 pagesA MRAS-based Stator Resistance and Speed Estimation For Sensorless IPMSMmusty38No ratings yet
- Force Estimation Using Vibration DataDocument9 pagesForce Estimation Using Vibration DataSushil CimiNo ratings yet
- Investigation On Modal Transient Response Analysis of Engine Crankshaft StructureDocument10 pagesInvestigation On Modal Transient Response Analysis of Engine Crankshaft StructureDiego LliviNo ratings yet
- Neues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficFrom EverandNeues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Banerjee 2018Document14 pagesBanerjee 2018Prasad JoshiNo ratings yet
- 19MAE0010 - AEC Assignment 3Document16 pages19MAE0010 - AEC Assignment 3Prasad JoshiNo ratings yet
- Arai Mvit Prasad Joshi 19mae0010Document2 pagesArai Mvit Prasad Joshi 19mae0010Prasad JoshiNo ratings yet
- Prasad Joshi: Career ObjectivesDocument2 pagesPrasad Joshi: Career ObjectivesPrasad JoshiNo ratings yet
- Maintenance Manual Basic VersionDocument170 pagesMaintenance Manual Basic VersionMichał Borodziuk100% (2)
- Shop Manual: WA65-3 WA65-3 Parallel Lift WA75-3 WA85-3 WA90-3 WA95-3Document422 pagesShop Manual: WA65-3 WA65-3 Parallel Lift WA75-3 WA85-3 WA90-3 WA95-3Thein Htoon lwin100% (3)
- Car To Arduino Communication CAN Bus Sniffing and Broadcasting With ArduinoDocument32 pagesCar To Arduino Communication CAN Bus Sniffing and Broadcasting With ArduinoGabrio BarbieriNo ratings yet
- Preview - AIAG+CQI 15 2020Document9 pagesPreview - AIAG+CQI 15 2020sangameshwar majareNo ratings yet
- B&W Alpha LubricationDocument4 pagesB&W Alpha Lubricationimmyself94% (17)
- Tundra Partes 9Document3 pagesTundra Partes 9alexander pintoNo ratings yet
- Diesel Exhaust FluidDocument7 pagesDiesel Exhaust FluidCISHAC FPNo ratings yet
- The Complete Book of Classic and Modern Triumph Motorcycles 1937-TodayDocument275 pagesThe Complete Book of Classic and Modern Triumph Motorcycles 1937-TodayrazshievNo ratings yet
- GMW 3112-2022Document55 pagesGMW 3112-2022baijuchangNo ratings yet
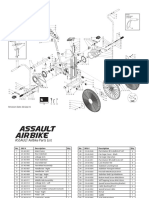
- Assault Airbike Exploded Diagram: Revision Date 26.sep.16Document2 pagesAssault Airbike Exploded Diagram: Revision Date 26.sep.16rpa 007No ratings yet
- Traffic Violations and Penalties Fines/Penalties: Code Violation 1ST 2ND 3RD Offense FrequencyDocument5 pagesTraffic Violations and Penalties Fines/Penalties: Code Violation 1ST 2ND 3RD Offense FrequencyNile UyNo ratings yet
- Vehicle Technology Division: Vehicle Approval and InformationDocument9 pagesVehicle Technology Division: Vehicle Approval and InformationautocomtrucksNo ratings yet
- Operator's Manual: SF-110/120 FlowbenchDocument53 pagesOperator's Manual: SF-110/120 FlowbenchPaulo Henrique MedeirosNo ratings yet
- SWOT Analysis AmazonDocument24 pagesSWOT Analysis AmazonPayal Patnaik100% (2)
- 140k Elec PDFDocument20 pages140k Elec PDFhitler morales gavidiaNo ratings yet
- Khyber Service ManualDocument55 pagesKhyber Service Manualsalmanshahidkhan2260% (1)
- A Managment Strategy For Solar Panel-Battery-Super Capacitor Hybrid Energy System in Solar CarDocument6 pagesA Managment Strategy For Solar Panel-Battery-Super Capacitor Hybrid Energy System in Solar CarMarcelo Millapan100% (1)
- Automax NanoTech Fuel EnhancerDocument3 pagesAutomax NanoTech Fuel EnhancermoromokaNo ratings yet
- Diagnostic Trouble Codes (DTC) : 14.1 About The Codes Shown in The TableDocument6 pagesDiagnostic Trouble Codes (DTC) : 14.1 About The Codes Shown in The Tablejorgebbcaarg100% (1)
- P92-2410 SantiDocument5 pagesP92-2410 Santicarlos ramosNo ratings yet
- Illustrated On Model 930: 1 Filter Element 2 Pump Filter UnitDocument3 pagesIllustrated On Model 930: 1 Filter Element 2 Pump Filter UnitReinaldo ZorrillaNo ratings yet
- Oifltc La Revc enDocument148 pagesOifltc La Revc enYassine ChqoubiNo ratings yet
- Drawing Block and Notes StandardDocument25 pagesDrawing Block and Notes StandardJosué PérezNo ratings yet
- 2011 Chevrolet Cruze LTZ At: Great DealDocument4 pages2011 Chevrolet Cruze LTZ At: Great DealBoby VillariNo ratings yet
- Form Erly JF40 2EDocument4 pagesForm Erly JF40 2EyoussefNo ratings yet
- Who Will Buy Xylo - Mahindra and Mahindra Automotive Sector: Ahindra and Ahindra AckgroundDocument10 pagesWho Will Buy Xylo - Mahindra and Mahindra Automotive Sector: Ahindra and Ahindra AckgroundVarun DavuluriNo ratings yet