Download as pdf or txt
You might also like
- 3 - ATPL Questions AGK2-Electricity - ElectonicsDocument94 pages3 - ATPL Questions AGK2-Electricity - ElectonicsTanvir HasanNo ratings yet
- Electric Motor ReportDocument23 pagesElectric Motor ReportAnfield Faithful67% (3)
- 400HP LV Toshiba MotorDocument20 pages400HP LV Toshiba MotorEdil MartinezNo ratings yet
- Group 2 Ac Motors Technical ReportDocument12 pagesGroup 2 Ac Motors Technical Reporttristan jeff bautistaNo ratings yet
- BL BLDC Motor Specifications R1 PDFDocument6 pagesBL BLDC Motor Specifications R1 PDFoskr.bstNo ratings yet
- 10-AC GeneratorsDocument20 pages10-AC GeneratorsZgmxkyckyxNo ratings yet
- Machines Lab ProjectDocument23 pagesMachines Lab ProjecttalaalmakhzoumiNo ratings yet
- NEMA Three Phase AC Motor Home Study CourseDocument66 pagesNEMA Three Phase AC Motor Home Study CourseOssama Abdel GhanyNo ratings yet
- 10 Ac Generators Component Theory OperationsDocument16 pages10 Ac Generators Component Theory Operationsronniee287No ratings yet
- TF Motores InglesDocument37 pagesTF Motores Inglesjdgarciag1No ratings yet
- Electrical Machines Lab March 16 UpdateDocument53 pagesElectrical Machines Lab March 16 Updatepeter vanderNo ratings yet
- Lesson 4Document5 pagesLesson 4Phạm Thanh TùngNo ratings yet
- DC Shunt MotorDocument14 pagesDC Shunt MotorJohn kamandaNo ratings yet
- Motor BasicsDocument23 pagesMotor BasicsDr. S. KUDIYARASANNo ratings yet
- Repulsion MotorDocument10 pagesRepulsion MotorAhmed Abd El MoatiNo ratings yet
- Parameter Estimation of Three Phase Induction Motor An Innovative Approach Thesis PDFDocument58 pagesParameter Estimation of Three Phase Induction Motor An Innovative Approach Thesis PDFAmit BhargavaNo ratings yet
- University of Trinidad and Tobago (UTT) Department of Utilities EngineeringDocument14 pagesUniversity of Trinidad and Tobago (UTT) Department of Utilities Engineeringfaraherh amberNo ratings yet
- Modeling and Parameter Estimation of Synchronous Machine - GR LekhemaDocument33 pagesModeling and Parameter Estimation of Synchronous Machine - GR LekhemaRatoka LekhemaNo ratings yet
- Electrical MotorDocument55 pagesElectrical Motorabdulkadhir100% (1)
- Activity Sheets-AC MotorsDocument12 pagesActivity Sheets-AC Motorsyiooooooo56No ratings yet
- Ec-Ii IttDocument133 pagesEc-Ii Ittmalihaishratjarin870No ratings yet
- IptDocument44 pagesIptrupaNo ratings yet
- Unit 6Document15 pagesUnit 6idasyarmilaNo ratings yet
- AC Machine FundamentalsDocument24 pagesAC Machine FundamentalsKimsairng CheaNo ratings yet
- Lab 3abDocument16 pagesLab 3abLiaqat AliNo ratings yet
- Soktugumun 1Document17 pagesSoktugumun 1SananelanNo ratings yet
- 12 Ac Motor Theory and TypesDocument19 pages12 Ac Motor Theory and Typesronniee287No ratings yet
- Analysis of Thyristor Controlled Induction Motors Based VVCFDocument4 pagesAnalysis of Thyristor Controlled Induction Motors Based VVCFDipti NagareNo ratings yet
- Sy em IiDocument3 pagesSy em IiKunal MeshramNo ratings yet
- AC MachineDocument67 pagesAC MachineNebyou DanielNo ratings yet
- Chapter 2 Prime MoversDocument90 pagesChapter 2 Prime Moversaimi wahabNo ratings yet
- Motors & GeneratorsDocument18 pagesMotors & GeneratorsLouisLou100% (3)
- Electromagnetic Engine: Topic of Case StudyDocument17 pagesElectromagnetic Engine: Topic of Case StudyMuneerAhmedNo ratings yet
- 19EE402 AC MachinesDocument4 pages19EE402 AC Machinespramana_gmritNo ratings yet
- EXPERIMENT 1 - FamiliarizationDocument9 pagesEXPERIMENT 1 - FamiliarizationPatricia GalorioNo ratings yet
- GER4724 Torsional Dynamics PaperDocument16 pagesGER4724 Torsional Dynamics PaperBilal AllouhNo ratings yet
- Induction MachinesDocument11 pagesInduction MachinesTayyab HussainNo ratings yet
- Stepper MotorDocument16 pagesStepper MotorpaviliondmNo ratings yet
- Construction of Simple Electric MotorDocument5 pagesConstruction of Simple Electric MotormohkristNo ratings yet
- Experiment No. 2.4 - The Squirrel-Cage Induction Motor ObjectiveDocument3 pagesExperiment No. 2.4 - The Squirrel-Cage Induction Motor ObjectiveKristine AldayNo ratings yet
- Electrical MachinesDocument4 pagesElectrical MachinesAct SujanpurNo ratings yet
- Skip To ContentDocument17 pagesSkip To Contentkidanemariam teseraNo ratings yet
- 1-EM Section 1 Motor OperationDocument38 pages1-EM Section 1 Motor Operationmhafidz49No ratings yet
- Stepper Motor Operation & C Language Program CodeDocument16 pagesStepper Motor Operation & C Language Program CodeHendrie TanNo ratings yet
- EMMA Unit 2 Mathematical Model of DC Shunt MotorDocument15 pagesEMMA Unit 2 Mathematical Model of DC Shunt MotorSaikumar NemalikantiNo ratings yet
- AC Technical ReferenceDocument56 pagesAC Technical ReferenceAli SamieeNo ratings yet
- Induction MotorsDocument168 pagesInduction MotorsVARAPRASADNo ratings yet
- Assignment Ac DCDocument10 pagesAssignment Ac DCKamil KhairiNo ratings yet
- A.C. Motor and Its TypesDocument10 pagesA.C. Motor and Its Typesandi yusufNo ratings yet
- A.C. Motor and Its TypesDocument10 pagesA.C. Motor and Its TypessasidaranNo ratings yet
- Emec Gtu ImpDocument3 pagesEmec Gtu ImpSwastik PanchalNo ratings yet
- Laporan Praktikum Winding Resistance Measurement Experiment N.1Document12 pagesLaporan Praktikum Winding Resistance Measurement Experiment N.1baharudinaldoNo ratings yet
- Fisika Zaka Nurfadilah 1903035003 TM2ADocument5 pagesFisika Zaka Nurfadilah 1903035003 TM2Azaka nurfadilahNo ratings yet
- Etd Lab3Document10 pagesEtd Lab3Isaya KawanaNo ratings yet
- EM - II - QB - Rec EditionDocument6 pagesEM - II - QB - Rec Editionmadhes14No ratings yet
- Unit 3Document74 pagesUnit 3Arjun PratabNo ratings yet
- Module 3 AC Generators Transformers AC MotorsDocument57 pagesModule 3 AC Generators Transformers AC MotorsEme Elibe Johnson EmestarNo ratings yet
- Electrical Science Transformers: DOE FundamentalsDocument25 pagesElectrical Science Transformers: DOE FundamentalsgebremariamNo ratings yet
- ABE 11 Laboratory Exercise 2 Electric MotorsDocument7 pagesABE 11 Laboratory Exercise 2 Electric MotorsMarife HambreNo ratings yet
- Servo Control Facts: Baldor Electric CompanyDocument24 pagesServo Control Facts: Baldor Electric CompanyRizwan HameedNo ratings yet
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- Elk Motor Operating ManualDocument17 pagesElk Motor Operating Manualagbajelola idrisNo ratings yet
- Electrolysis of Water Study Guide: MaterialsDocument2 pagesElectrolysis of Water Study Guide: Materialsagbajelola idrisNo ratings yet
- Study of C and Si Loss Through Oxidation in Cast Iron Base Metal Using Rotary Furnace For MeltingDocument7 pagesStudy of C and Si Loss Through Oxidation in Cast Iron Base Metal Using Rotary Furnace For Meltingagbajelola idrisNo ratings yet
- Determining Your Binder WorktimeDocument3 pagesDetermining Your Binder Worktimeagbajelola idrisNo ratings yet
- General Analysis of The Three-Phase Asynchronous Motor With Spiral Sheet Rotor. Operation, Parameters and Characteristic ValuesDocument13 pagesGeneral Analysis of The Three-Phase Asynchronous Motor With Spiral Sheet Rotor. Operation, Parameters and Characteristic Valuesagbajelola idrisNo ratings yet
- Induction MotorDocument21 pagesInduction Motoragbajelola idrisNo ratings yet
- Rotary FurnaceDocument10 pagesRotary Furnaceagbajelola idrisNo ratings yet
- WCE2012 pp1766-1772Document7 pagesWCE2012 pp1766-1772agbajelola idrisNo ratings yet
- The Design of A Radiation-Recuperative Heat ExchanDocument9 pagesThe Design of A Radiation-Recuperative Heat Exchanagbajelola idrisNo ratings yet
- Study of Carbon and Silicon Loss Through Oxidation in Cast Iron Base Metal Using Rotary Furnace For MeltingDocument6 pagesStudy of Carbon and Silicon Loss Through Oxidation in Cast Iron Base Metal Using Rotary Furnace For Meltingagbajelola idrisNo ratings yet
- Activation Energy of The Self - Diffusion of Water in Compacted Clay Systems: A Case Study With Opalinus ClayDocument2 pagesActivation Energy of The Self - Diffusion of Water in Compacted Clay Systems: A Case Study With Opalinus Clayagbajelola idrisNo ratings yet
- Compositionial and Industrial Assessment of Isua-Akoko, Akure, Ayadi and Lafe (Ode Aye) Clay Deposits of Ondo State, NigeriaDocument9 pagesCompositionial and Industrial Assessment of Isua-Akoko, Akure, Ayadi and Lafe (Ode Aye) Clay Deposits of Ondo State, Nigeriaagbajelola idrisNo ratings yet
- Mechanical Sparks As An Ignition Source of Gas and Dust ExplosionsDocument6 pagesMechanical Sparks As An Ignition Source of Gas and Dust Explosionsagbajelola idrisNo ratings yet
- IV.H.6 Increasing The Efficiency of The Water Electrolysis CellDocument4 pagesIV.H.6 Increasing The Efficiency of The Water Electrolysis Cellagbajelola idrisNo ratings yet
- Geology and Occurrences of Limestone and Marble in NigeriaDocument7 pagesGeology and Occurrences of Limestone and Marble in Nigeriaagbajelola idrisNo ratings yet
- Catalog Stationary Screw Compressors A en V 1 2 WebDocument24 pagesCatalog Stationary Screw Compressors A en V 1 2 WebRoman ChubaNo ratings yet
- Laboratory For TractionDocument13 pagesLaboratory For TractionsiritapeNo ratings yet
- Mach3 USB Motion Controller UC300 User's Manual: The Version of 20180925Document23 pagesMach3 USB Motion Controller UC300 User's Manual: The Version of 20180925Juan Carlos Bernal GarciaNo ratings yet
- Kaeser BSDDocument9 pagesKaeser BSDleeconner3No ratings yet
- CNC PCB Drilling Machine Using Novel Natural Approach To Euclidean TSPDocument6 pagesCNC PCB Drilling Machine Using Novel Natural Approach To Euclidean TSPIrina AtudoreiNo ratings yet
- Unit 1 An Introduction of Hydraulic SystemDocument30 pagesUnit 1 An Introduction of Hydraulic SystemMuhannad AbdulRaouf100% (2)
- Performance Analysis of Single Phase Induction Motor and Switched Reluctance Motor Used in Domestic Appliances With A View of Energy ConservationDocument7 pagesPerformance Analysis of Single Phase Induction Motor and Switched Reluctance Motor Used in Domestic Appliances With A View of Energy ConservationJose Dejesus Barajas SoteloNo ratings yet
- BT3326 3.2 (B) Manual (Electrical) PDFDocument1,520 pagesBT3326 3.2 (B) Manual (Electrical) PDFNgà NguyễnNo ratings yet
- Gravimetric Masterbatch Feeder: Operation and Installation ManualDocument37 pagesGravimetric Masterbatch Feeder: Operation and Installation Manualbivita valdezNo ratings yet
- EKT+Question+series+JDocument4 pagesEKT+Question+series+JMota ChashmaNo ratings yet
- PM42M048Document1 pagePM42M048Lendry NormanNo ratings yet
- VaristorDocument82 pagesVaristorbookreaderAUNo ratings yet
- Catalogue Chiller Carrier 19XRD - 2012Document24 pagesCatalogue Chiller Carrier 19XRD - 2012jimmiilongNo ratings yet
- Electrical Machines DC Motor NewDocument27 pagesElectrical Machines DC Motor NewPranav MahadikNo ratings yet
- M 16 Static DrivesDocument2 pagesM 16 Static Drivesyr48No ratings yet
- OD32mm DC Gear Motor-1Document8 pagesOD32mm DC Gear Motor-1Humberto GalvezNo ratings yet
- How To Control A Stepper Motor With Arduino Motor Shield Rev3Document33 pagesHow To Control A Stepper Motor With Arduino Motor Shield Rev3hakimNo ratings yet
- Solarsan enDocument6 pagesSolarsan enAdam SzmydtNo ratings yet
- Nordbloc.1-G1012 Ie1 Ie2 Ie3 en 1614Document114 pagesNordbloc.1-G1012 Ie1 Ie2 Ie3 en 1614Dispatch TranstechgearsNo ratings yet
- EE8005 Special Electrical Machines A Course Material OnDocument151 pagesEE8005 Special Electrical Machines A Course Material OnjoNo ratings yet
- 1.5 - Starting and Stopping Methods-4Document48 pages1.5 - Starting and Stopping Methods-4luzpachecoblNo ratings yet
- Pump VLR-16Document2 pagesPump VLR-16Nguyễn Hoàng PhúcNo ratings yet
- Manual J1000Document6 pagesManual J1000Jose Luis MendozaNo ratings yet
- Question BankDocument5 pagesQuestion BankAASTHA KIETNo ratings yet
- High Speed Power TransferDocument33 pagesHigh Speed Power TransferJAYKUMAR SINGHNo ratings yet
- Customized Drive Solutions: Movement by PerfectionDocument6 pagesCustomized Drive Solutions: Movement by PerfectionDevan FairzNo ratings yet
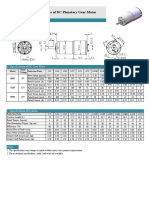
- Tacmina Motor SXDA1Document12 pagesTacmina Motor SXDA1arisqi wahyuNo ratings yet