Download as pdf or txt
You might also like
- Growing Up NudistDocument50 pagesGrowing Up NudistLeon Mason50% (4)
- Drug StudyDocument7 pagesDrug StudyKim GalamgamNo ratings yet
- Improved Biomedical Device For Spasticity QuantificationDocument4 pagesImproved Biomedical Device For Spasticity QuantificationTAOUACHINo ratings yet
- Haptic Simulation of Elbow Joint SpasticityDocument2 pagesHaptic Simulation of Elbow Joint SpasticityTAOUACHINo ratings yet
- Sensors: Real-Time Estimation of Pathological Tremor Parameters From Gyroscope DataDocument21 pagesSensors: Real-Time Estimation of Pathological Tremor Parameters From Gyroscope DataLuis Eduardo Romero MaldonadoNo ratings yet
- Home Rehabilitation System For The Upper ExtremityDocument4 pagesHome Rehabilitation System For The Upper ExtremityAnh HuyNo ratings yet
- Control Strategies For Hand ProsthesesDocument7 pagesControl Strategies For Hand ProsthesesamirtempsNo ratings yet
- 1 s2.0 S2405844024049429 MainDocument24 pages1 s2.0 S2405844024049429 MainmikyyeheyesNo ratings yet
- Analysis of Myoelectric Signals To Prosthesis ApplicationsDocument8 pagesAnalysis of Myoelectric Signals To Prosthesis ApplicationsBrunaNo ratings yet
- Cavallo - CAPESB 2021Document2 pagesCavallo - CAPESB 2021tanvir anwarNo ratings yet
- Mechatronics: Umut Mayetin, Serdar KucukDocument17 pagesMechatronics: Umut Mayetin, Serdar Kucukalamin khondakerNo ratings yet
- Sensors 20 02354Document16 pagesSensors 20 02354Anh HuyNo ratings yet
- Art Iculos Cient Ificos: Kevin B. Caiza. Y Dise No Electr Onico Tarea 1 Profesor: Ing. David RivasDocument5 pagesArt Iculos Cient Ificos: Kevin B. Caiza. Y Dise No Electr Onico Tarea 1 Profesor: Ing. David RivasKevin CaizaNo ratings yet
- KINOVEA - Reliability of Kinovea® Software and AgreementDocument12 pagesKINOVEA - Reliability of Kinovea® Software and AgreementTiago MarcheseNo ratings yet
- Morais 2021 J. Phys. Conf. Ser. 1826 012084Document8 pagesMorais 2021 J. Phys. Conf. Ser. 1826 012084Johnny Joe AguilarNo ratings yet
- Medical Mechatronics For HealthcareDocument4 pagesMedical Mechatronics For HealthcareAbderaouf BenyammiNo ratings yet
- SensorsDocument30 pagesSensorsJuan sebastian lopez escobarNo ratings yet
- Sensors - Editorial Sensor Fusion-2020Document3 pagesSensors - Editorial Sensor Fusion-2020SamuelsonNo ratings yet
- Mathematics 11 00970Document17 pagesMathematics 11 00970TONY HII CHANG SOONNo ratings yet
- 2023 ABME NN Classification Gait EstimationDocument14 pages2023 ABME NN Classification Gait Estimationdarkboy.1619No ratings yet
- Jurnal Kelompok 3Document6 pagesJurnal Kelompok 3Fidya Aisyah Putri SamodraNo ratings yet
- Chapter One 1.0Document32 pagesChapter One 1.0Victor ImehNo ratings yet
- Sensors-13-14466 (Published Article)Document18 pagesSensors-13-14466 (Published Article)Erna TamiziNo ratings yet
- Sensors: Lower Limb Wearable Capacitive Sensing and Its Applications To Recognizing Human GaitsDocument22 pagesSensors: Lower Limb Wearable Capacitive Sensing and Its Applications To Recognizing Human Gaitsmarius_haganNo ratings yet
- SensorsDocument15 pagesSensorslohanaNo ratings yet
- Alberts Et Al. - 2015 - Using Accelerometer and Gyroscopic Measures To QuaDocument11 pagesAlberts Et Al. - 2015 - Using Accelerometer and Gyroscopic Measures To QuaYouriDuchêneNo ratings yet
- Artificial Neural Network Learns Clinical Assessment of Spasticity in Modified Ashworth ScaleDocument9 pagesArtificial Neural Network Learns Clinical Assessment of Spasticity in Modified Ashworth ScalePrasasti 19No ratings yet
- tmpCB1A TMPDocument5 pagestmpCB1A TMPFrontiersNo ratings yet
- Penerbit, 024Document7 pagesPenerbit, 024Amanuel TilayeNo ratings yet
- Gassert-Dietz2018 Article RehabilitationRobotsForTheTreaDocument15 pagesGassert-Dietz2018 Article RehabilitationRobotsForTheTreaMouyad SrNo ratings yet
- Modeling The Neuro-Mechanics of Human Balance WhenDocument25 pagesModeling The Neuro-Mechanics of Human Balance Whennadia.imranNo ratings yet
- A Fairly Simple Mechatronic Device For Training Human Wrist MotionDocument15 pagesA Fairly Simple Mechatronic Device For Training Human Wrist Motionalamin khondakerNo ratings yet
- Grasp and Release With Surface Functional Electrical Stimulation Using ADocument4 pagesGrasp and Release With Surface Functional Electrical Stimulation Using AAlexandra RusuNo ratings yet
- Movement Biomechanics Goes Upwards-From The Leg To The ArmDocument10 pagesMovement Biomechanics Goes Upwards-From The Leg To The ArmMuhammad FahmyNo ratings yet
- A Review and Evaluation of Available Gait Analysis Technologies, and Their Potential For The Measurement of Impact TransmissionDocument15 pagesA Review and Evaluation of Available Gait Analysis Technologies, and Their Potential For The Measurement of Impact TransmissionMarianoNo ratings yet
- 2020 Giannini Wearable Sensor Network For Biomechanical Overload Assessment in Manual Material HandlingDocument29 pages2020 Giannini Wearable Sensor Network For Biomechanical Overload Assessment in Manual Material HandlingJohannes SchützNo ratings yet
- 2020 A Bio-Signal Enhanced Adaptive Impedance Controller For LowerDocument6 pages2020 A Bio-Signal Enhanced Adaptive Impedance Controller For LowerANSHUMAAN P BHAGATNo ratings yet
- Sensors: EEG-Based Control For Upper and Lower Limb Exoskeletons and Prostheses: A Systematic ReviewDocument27 pagesSensors: EEG-Based Control For Upper and Lower Limb Exoskeletons and Prostheses: A Systematic ReviewnaeemNo ratings yet
- An Actuated Finger Exoskeleton For Hand Rehabilitation Following Stroke 2007Document6 pagesAn Actuated Finger Exoskeleton For Hand Rehabilitation Following Stroke 2007newkid2202No ratings yet
- 2020 Article 3270Document26 pages2020 Article 3270Gustavo teixeiraNo ratings yet
- Transcranial Direct Current Stimulation (TDCS) and Robotic Practice in Chronic Stroke: The Dimension of TimingDocument9 pagesTranscranial Direct Current Stimulation (TDCS) and Robotic Practice in Chronic Stroke: The Dimension of TimingjuanNo ratings yet
- Development of An Upper Limb Exoskeleton For Rehabilitation With Feedback From EMG and IMU SensorDocument7 pagesDevelopment of An Upper Limb Exoskeleton For Rehabilitation With Feedback From EMG and IMU SensorkeerthiNo ratings yet
- EMG en UCI - Club de Revista PDFDocument6 pagesEMG en UCI - Club de Revista PDFJOSE JULIAN BERNAL SANCHEZNo ratings yet
- A Novel Elbow Pneumatic Muscle Actuator For Exoskeleton Arm in Post-Stroke RehabilitationDocument6 pagesA Novel Elbow Pneumatic Muscle Actuator For Exoskeleton Arm in Post-Stroke RehabilitationSathvik BhatNo ratings yet
- Evaluating Kinect, OpenPose and BlazePose For Human Body Movement Analysis On A Low Back Pain Physical Rehabilitation DatasetDocument4 pagesEvaluating Kinect, OpenPose and BlazePose For Human Body Movement Analysis On A Low Back Pain Physical Rehabilitation DatasetAleksa MarusicNo ratings yet
- Measuring Multi-Joint Stiffness During Single Movements: Numerical Validation of A Novel Time-Frequency ApproachDocument24 pagesMeasuring Multi-Joint Stiffness During Single Movements: Numerical Validation of A Novel Time-Frequency ApproachDavide PiovesanNo ratings yet
- 2003 - Shahram Payandeh - Towardnewdesignsofhapticdevicesforminimallyinvasiv (Retrieved 2018-09-07)Document7 pages2003 - Shahram Payandeh - Towardnewdesignsofhapticdevicesforminimallyinvasiv (Retrieved 2018-09-07)AmyNo ratings yet
- Fiabilidad, Capacidad de Respuesta y Validez deDocument9 pagesFiabilidad, Capacidad de Respuesta y Validez degisela duarteNo ratings yet
- Modern Functional Evaluation Methods For Muscle Strength and Gait AnalysisDocument133 pagesModern Functional Evaluation Methods For Muscle Strength and Gait AnalysisMuhammad Nur Arif MNo ratings yet
- Review of Electromyography Onset Detection Methods For Real-Time Control of Robotic ExoskeletonsDocument16 pagesReview of Electromyography Onset Detection Methods For Real-Time Control of Robotic ExoskeletonsDaniel Prado de CamposNo ratings yet
- Haptic Training Method Using A Nonlinear Joint Control: NtroductionDocument8 pagesHaptic Training Method Using A Nonlinear Joint Control: NtroductionRamanan SubramanianNo ratings yet
- Glasses-Free VR Rehab For Upper Limb Motor FunctionDocument7 pagesGlasses-Free VR Rehab For Upper Limb Motor FunctionAltaf ChaudhryNo ratings yet
- BMC Neurology: Comparing Unilateral and Bilateral Upper Limb Training: The ULTRA-stroke Program DesignDocument14 pagesBMC Neurology: Comparing Unilateral and Bilateral Upper Limb Training: The ULTRA-stroke Program DesignDharam PandeyNo ratings yet
- 2015 - Towards-a-Robotic-Knee-Exoskeleton-Control-Based-on-Human Intention Through EEG and sEMGsignalsDocument8 pages2015 - Towards-a-Robotic-Knee-Exoskeleton-Control-Based-on-Human Intention Through EEG and sEMGsignalsArun KumarNo ratings yet
- Symmetry 14 00081Document30 pagesSymmetry 14 00081royoga3739No ratings yet
- Hand Gesture Recognition With Body Sensor NetworksDocument4 pagesHand Gesture Recognition With Body Sensor NetworksSunil Kumar RNo ratings yet
- Sport Biomechanics ApplicationsDocument18 pagesSport Biomechanics Applicationsdybarrero10No ratings yet
- Two-Degree Adjustable Exoskeleton For Assistance of The Human Arm Using A Mechanical System of Fast Assembly and UpgradabilityDocument15 pagesTwo-Degree Adjustable Exoskeleton For Assistance of The Human Arm Using A Mechanical System of Fast Assembly and UpgradabilityTYTNo ratings yet
- Assignment Biosensor Piezoelectric Sensor Submitted byDocument8 pagesAssignment Biosensor Piezoelectric Sensor Submitted byHafsa ZahidNo ratings yet
- Castiblanco Jenny2021Document16 pagesCastiblanco Jenny2021Sayda Alisson Huacre TuctoNo ratings yet
- Wong 2007Document15 pagesWong 2007Somente CoisasNo ratings yet
- Breathing Through A Particular Nostril Can Alter Metabolism and Autonomic Activities Shirley Telles, Nagarathna R., and Nagendra H. RDocument5 pagesBreathing Through A Particular Nostril Can Alter Metabolism and Autonomic Activities Shirley Telles, Nagarathna R., and Nagendra H. Rinacio_miranda9108No ratings yet
- Cytocox 1 BulDocument4 pagesCytocox 1 BulLeidy JohannaNo ratings yet
- Conduction of HeartDocument21 pagesConduction of Heartangelsundar22100% (1)
- Questions From WorksheetDocument3 pagesQuestions From WorksheetosayomoreNo ratings yet
- pv0315 FaceDocument12 pagespv0315 Faceapi-287373625No ratings yet
- Case Study FMCDocument48 pagesCase Study FMCbolutifeNo ratings yet
- What Is A Cell? Describe The Functions of OrganellesDocument18 pagesWhat Is A Cell? Describe The Functions of Organellestdukes546No ratings yet
- MultraumaDocument9 pagesMultraumaDaniel Andres ForeroNo ratings yet
- Air Microbiology 2nd YrDocument47 pagesAir Microbiology 2nd YrBlueSagaNo ratings yet
- Daily Calorie RequirementDocument4 pagesDaily Calorie RequirementpenguinpowerrrrNo ratings yet
- Visual Dysfunction in DiabetesDocument395 pagesVisual Dysfunction in DiabetesSergioAcuñaNo ratings yet
- Practical and Theoretical Seminar Of: Bioprogressive ScienceDocument5 pagesPractical and Theoretical Seminar Of: Bioprogressive SciencesaberNo ratings yet
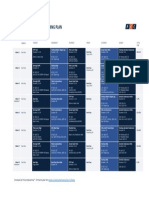
- 8 Weeks Gran Fondo OverivewDocument1 page8 Weeks Gran Fondo OverivewBorkoArsovicNo ratings yet
- Tarka 12 Yoga and NeuroscienceDocument123 pagesTarka 12 Yoga and NeuroscienceEloNo ratings yet
- Rani Ti Dine Tramadol Ketorolac in Paracetamol Drug StudyDocument10 pagesRani Ti Dine Tramadol Ketorolac in Paracetamol Drug StudyIv'z TandocNo ratings yet
- hM1Dq: Adenylate Cyclase hM2Di hM4Di Kord hM1Dq hM3Dq hM5Dq Ca Ca Ca ChannelDocument2 pageshM1Dq: Adenylate Cyclase hM2Di hM4Di Kord hM1Dq hM3Dq hM5Dq Ca Ca Ca ChannelvasiliyNo ratings yet
- Demonstration On Newborn ResuscitationDocument7 pagesDemonstration On Newborn Resuscitationvineeta.ashoknagarNo ratings yet
- Angiography and ArteriographyDocument64 pagesAngiography and ArteriographyRyBone95100% (1)
- MCQs On Histology of GIT (Gastrointestinal) TractDocument3 pagesMCQs On Histology of GIT (Gastrointestinal) Tractsoban71% (7)
- Free Travel Guide PDFDocument7 pagesFree Travel Guide PDFFarhanjeeNo ratings yet
- Pathology of The Lung: Djumadi AchmadDocument26 pagesPathology of The Lung: Djumadi AchmadVivi DeviyanaNo ratings yet
- Cambridge International Advanced Subsidiary and Advanced LevelDocument8 pagesCambridge International Advanced Subsidiary and Advanced Levelmaria sanchezNo ratings yet
- One For The RoadDocument6 pagesOne For The Roadapi-436999141No ratings yet
- Fracture and HealingDocument21 pagesFracture and HealingSujan Thapa100% (1)
- Final ProjectDocument58 pagesFinal ProjectAnonymous UyGHBJUNo ratings yet
- 4 - The Unsteady BookeeperDocument4 pages4 - The Unsteady Bookeeperkvguan7090No ratings yet
- Biology Esei STPM 2017@ 2018Document43 pagesBiology Esei STPM 2017@ 2018Wei Yuen100% (1)
- Answer and Rationale MaternityDocument21 pagesAnswer and Rationale MaternityMark ElbenNo ratings yet