Download as docx, pdf, or txt
You might also like
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Deep Bar and Double Cage 010223Document20 pagesDeep Bar and Double Cage 010223Debankan ChatterjeeNo ratings yet
- UNIT-III Three Phase & Single Phase Induction MotorsDocument8 pagesUNIT-III Three Phase & Single Phase Induction MotorsRahulRamamoorthyNo ratings yet
- Lec4 Polyphase Induction Motor IIDocument14 pagesLec4 Polyphase Induction Motor IIMohammed Dyhia AliNo ratings yet
- Double Cage RotorsDocument17 pagesDouble Cage RotorsweirdwolfvortexNo ratings yet
- Construction of Three Phase Induction MotorDocument18 pagesConstruction of Three Phase Induction MotorRajeev ValunjkarNo ratings yet
- Taken From Course Structure 3 Phase Induction MachinesDocument18 pagesTaken From Course Structure 3 Phase Induction MachinesSyed Ahmed MasoodNo ratings yet
- Chapter 6 - Induction Motors (Part1)Document18 pagesChapter 6 - Induction Motors (Part1)SanjanaLakshmiNo ratings yet
- Induction MotorsDocument28 pagesInduction MotorsKimsairng CheaNo ratings yet
- Topic 1Document20 pagesTopic 1Ʋiŋêet ḠåuṯḁmNo ratings yet
- Applied Directly To The Stator WindingsDocument53 pagesApplied Directly To The Stator WindingsSew HunNo ratings yet
- 1-Introduction DR Syed Abid Ali ShahDocument64 pages1-Introduction DR Syed Abid Ali ShahMudasir larikNo ratings yet
- 2. Three Phase Induction MotorDocument17 pages2. Three Phase Induction Motorsmurfacct9753No ratings yet
- Electrical Machines: Unit-4Document53 pagesElectrical Machines: Unit-4MineCraft B-Tech CSNo ratings yet
- Induction Machine TrainerDocument29 pagesInduction Machine TrainerBabyNo ratings yet
- Ee2403-Special Electrical Machines Unit I - Synchronous Reluctance Motor Synchronous Reluctance Motor ConstructionDocument8 pagesEe2403-Special Electrical Machines Unit I - Synchronous Reluctance Motor Synchronous Reluctance Motor ConstructionVijaya KumarNo ratings yet
- Ind MachinesDocument23 pagesInd MachinesHareesh MadathilNo ratings yet
- Electrical Machines-II Units-III & IV Questions and AnswersDocument4 pagesElectrical Machines-II Units-III & IV Questions and AnswersJoseph Harindranath100% (2)
- Three Phase Induction MotorDocument21 pagesThree Phase Induction MotorPrianshu Jyosyula100% (2)
- Three Phase Induction MotorDocument22 pagesThree Phase Induction MotorHabteNo ratings yet
- Jayashree Make Soft Starter TheoryDocument14 pagesJayashree Make Soft Starter TheoryMihirNo ratings yet
- Motors and DrivesDocument23 pagesMotors and DrivesharishkumarsinghNo ratings yet
- The Equivalent Circuit and Torque of Three-Phase Induction MotorDocument11 pagesThe Equivalent Circuit and Torque of Three-Phase Induction Motorعمر تاليونNo ratings yet
- Ee 2403 Special Electrical MachinesDocument21 pagesEe 2403 Special Electrical MachinesSurya KrishnanNo ratings yet
- Induction MotorsDocument47 pagesInduction MotorsRiah Ann CayananNo ratings yet
- 1-EM Section 1 Motor OperationDocument38 pages1-EM Section 1 Motor Operationmhafidz49No ratings yet
- Induction Motor and Hydropower PlantDocument24 pagesInduction Motor and Hydropower PlantYugalal GurungNo ratings yet
- Ac Motors War-MebDocument10 pagesAc Motors War-MebolingxjcNo ratings yet
- Three Phase Motor PDFDocument30 pagesThree Phase Motor PDFAnjali Rani100% (1)
- Induction Synchronous MotorsDocument35 pagesInduction Synchronous MotorsDeandre LaingNo ratings yet
- EE2403 SEM 2 Marks PDFDocument15 pagesEE2403 SEM 2 Marks PDFkesavantNo ratings yet
- Three-Phase Induction MotorDocument21 pagesThree-Phase Induction MotorRajeev ValunjkarNo ratings yet
- Chapter 3, Three Phase IMDocument40 pagesChapter 3, Three Phase IMtemesgen adugnaNo ratings yet
- Single Phase MotorDocument32 pagesSingle Phase MotorsnzaimahNo ratings yet
- AIM: Comparative Study of Different Types of Starters Used For Three-Phase Induction MotorDocument8 pagesAIM: Comparative Study of Different Types of Starters Used For Three-Phase Induction MotorRD GamingNo ratings yet
- EE148Document6 pagesEE148Earl FloresNo ratings yet
- Double Cage Induction MotorDocument6 pagesDouble Cage Induction MotorGFGHJHKNo ratings yet
- Chapter 7-Induction Motors Part1 PDFDocument18 pagesChapter 7-Induction Motors Part1 PDFMohammadrezaÖztürkNo ratings yet
- Electrical Machines: Induction Motors - NoteDocument44 pagesElectrical Machines: Induction Motors - NoteFLOWERNo ratings yet
- Three-Phase Induction Motor: 1 Electrical MachinesDocument30 pagesThree-Phase Induction Motor: 1 Electrical MachinesOkezaki TemoyoNo ratings yet
- Ese 2021 (Induction)Document52 pagesEse 2021 (Induction)shaileshNo ratings yet
- Unit IVDocument6 pagesUnit IVRAMAKRISHNA PRABU GNo ratings yet
- 185 - EE8005, EE6703 Special Electrical Machines - Question BankDocument15 pages185 - EE8005, EE6703 Special Electrical Machines - Question BankNiteshNarukaNo ratings yet
- Three Phase Induction MotorsDocument22 pagesThree Phase Induction MotorsSabiha MahbubNo ratings yet
- 3-Phase Induction MotorDocument23 pages3-Phase Induction MotorAshish Verma100% (1)
- Module 3b (Electrical Machines)Document43 pagesModule 3b (Electrical Machines)MohammedNo ratings yet
- Applied Directly To The Stator WindingsDocument62 pagesApplied Directly To The Stator WindingsZekarias tenawNo ratings yet
- Applied Directly To The Stator WindingsDocument62 pagesApplied Directly To The Stator WindingsZekarias tenawNo ratings yet
- Three Phase Induction Motor: Presented BY: Ms. R.SindhujaDocument33 pagesThree Phase Induction Motor: Presented BY: Ms. R.SindhujaKayalvizhi SelvamNo ratings yet
- CHAPTER 8 Induction MotorDocument3 pagesCHAPTER 8 Induction MotorDhanashree ParanjapeNo ratings yet
- Single Phase Induction MotorsDocument18 pagesSingle Phase Induction MotorsAMIE Study Circle, RoorkeeNo ratings yet
- Induction (Asynchronous) Machines 1.1Document9 pagesInduction (Asynchronous) Machines 1.1Areej AdeebNo ratings yet
- Machines MidsemDocument43 pagesMachines MidsemPrasann KatiyarNo ratings yet
- Em - 16 MarksDocument14 pagesEm - 16 MarkskesavantNo ratings yet
- Single Phase Induction Motor Cross-Field TheoryDocument15 pagesSingle Phase Induction Motor Cross-Field TheoryShoaib Khan100% (1)
- Switched Reluctance MotorDocument12 pagesSwitched Reluctance MotorSUMAN CNo ratings yet
- Construction of SRMDocument3 pagesConstruction of SRMKartikey PraveenNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Fire-Lite FM90050 Data SheetDocument2 pagesFire-Lite FM90050 Data SheetJMAC SupplyNo ratings yet
- EN3ES1 Basic Electronics Engineering: Semiconductor Diode and Zener Diode Page 1 of 5Document5 pagesEN3ES1 Basic Electronics Engineering: Semiconductor Diode and Zener Diode Page 1 of 5Shubham SharmaNo ratings yet
- RFE HF Instrumentation Cables 2x2x0,75Document2 pagesRFE HF Instrumentation Cables 2x2x0,75Mikel IglesiasNo ratings yet
- 3 22FDSOI Globalfoundry Nan WuDocument24 pages3 22FDSOI Globalfoundry Nan WuVenkat Kiran SribhashyamNo ratings yet
- SR - No. Description Unit Technical Datasheet of Flexible Cables LDIS09CYUAY1004C006S 4CX6 Sq. MMDocument1 pageSR - No. Description Unit Technical Datasheet of Flexible Cables LDIS09CYUAY1004C006S 4CX6 Sq. MMkiranNo ratings yet
- Pressure SensorDocument21 pagesPressure SensorSagar PatilNo ratings yet
- Thyristor or Silicon Controlled RectifierDocument11 pagesThyristor or Silicon Controlled RectifiermrmummyeNo ratings yet
- Gate Layouts: 1.5 CMOS Fabrication and LayoutDocument1 pageGate Layouts: 1.5 CMOS Fabrication and LayoutCarlos SaavedraNo ratings yet
- Summative Assessment in General Physics IiDocument2 pagesSummative Assessment in General Physics IiKenneth VenturaNo ratings yet
- Audi Q5 Quattro (8RB) - EWD HeadlampsDocument43 pagesAudi Q5 Quattro (8RB) - EWD HeadlampsRodolfo DiazNo ratings yet
- Topic 9Document11 pagesTopic 9Cj GamingNo ratings yet
- DM - Chapter 9 - Street LightingDocument7 pagesDM - Chapter 9 - Street LightingKhay SaadNo ratings yet
- Power GenerationDocument16 pagesPower GenerationBert De BorjaNo ratings yet
- 132KV TURKAYAMJAL DDocument46 pages132KV TURKAYAMJAL DKarthik Boggarapu100% (1)
- Aires Acondicionados BARDDocument14 pagesAires Acondicionados BARDJMiguel RCNo ratings yet
- Wiring Diagram Manual Split System Air Conditioner: (C/H/T) SA6Document4 pagesWiring Diagram Manual Split System Air Conditioner: (C/H/T) SA6Muhammad ShazwanNo ratings yet
- Circuit BreakerDocument35 pagesCircuit BreakerJuan Felipe Garza GNo ratings yet
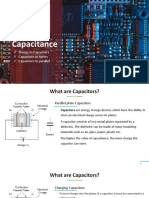
- CapacitanceDocument13 pagesCapacitanceOmar NadeemNo ratings yet
- Canalis KTA en Catalogue BD 27 03 2007Document214 pagesCanalis KTA en Catalogue BD 27 03 2007Gabriel Alexis Malagon CarvajalNo ratings yet
- EMC 255 Motor CheckerDocument1 pageEMC 255 Motor CheckerbalasasthaNo ratings yet
- Master Open Book Exam 1Document7 pagesMaster Open Book Exam 1Mike Adrian CerbitoNo ratings yet
- Odd-18 (W-18) 2131006-Electronic Devices - CircuitsDocument158 pagesOdd-18 (W-18) 2131006-Electronic Devices - Circuitsgecg ICNo ratings yet
- Digital Multimeter 98025Document8 pagesDigital Multimeter 98025123anthonyNo ratings yet
- 056-022 Breaker ControlDocument4 pages056-022 Breaker ControlkazishahNo ratings yet
- Hybrid System CatalogueDocument4 pagesHybrid System CatalogueerawrestlingNo ratings yet
- HVT Substation Equipment - Product List PDFDocument2 pagesHVT Substation Equipment - Product List PDFAmol DeshmukhNo ratings yet
- Schneider LR9 F Overload Relays PDFDocument15 pagesSchneider LR9 F Overload Relays PDFNing RuamsukeNo ratings yet
- ATS White Paper - 1SCC303022C0201 - 20-09Document24 pagesATS White Paper - 1SCC303022C0201 - 20-09sachini weesingheNo ratings yet
- AVR 3kVA 220VCA DatasheetDocument2 pagesAVR 3kVA 220VCA DatasheetdulcesinestesiaNo ratings yet
- 4 - JEE - Physics - Modern Physics - Valve Electronics - Diode ValveDocument4 pages4 - JEE - Physics - Modern Physics - Valve Electronics - Diode ValvescholasticaoffiahNo ratings yet