Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- SAP 4.7 Installation TutorialDocument54 pagesSAP 4.7 Installation Tutorialrajeev.ashokan8023100% (34)
- Chapter 4Document28 pagesChapter 4kuma alemayehuNo ratings yet
- Chapter Four Axial PumpDocument8 pagesChapter Four Axial Pumpkuma alemayehu100% (1)
- Chapter 7Document33 pagesChapter 7kuma alemayehuNo ratings yet
- Chapter 6Document11 pagesChapter 6kuma alemayehuNo ratings yet
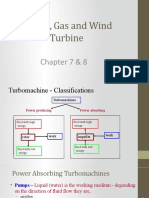
- Steam, Gas and Wind Turbine: Chapter 7 & 8Document45 pagesSteam, Gas and Wind Turbine: Chapter 7 & 8kuma alemayehuNo ratings yet
- S L Dixon Fluid Mechanics and Thermodynamics of TurbomachineryDocument4 pagesS L Dixon Fluid Mechanics and Thermodynamics of Turbomachinerykuma alemayehuNo ratings yet
- Ism Ch08Document59 pagesIsm Ch08kuma alemayehuNo ratings yet
- S L Dixon Fluid Mechanics and Thermodynamics of TurbomachineryDocument4 pagesS L Dixon Fluid Mechanics and Thermodynamics of Turbomachinerykuma alemayehuNo ratings yet
- Tribes in The Dark Quickstart (32317351)Document61 pagesTribes in The Dark Quickstart (32317351)jvmarron100% (1)
- Mental Health TalkDocument78 pagesMental Health Talkram100% (2)
- Dwnload Full Fundamentals of Cost Accounting 3rd Edition Lanen Solutions Manual PDFDocument35 pagesDwnload Full Fundamentals of Cost Accounting 3rd Edition Lanen Solutions Manual PDFmatte.caudalebvf100% (13)
- Elhai Và C NG S (2020)Document10 pagesElhai Và C NG S (2020)Ánh Ngọc Đỗ TrầnNo ratings yet
- Chapter1 Microchip FabricationDocument39 pagesChapter1 Microchip Fabrication吳文嘉100% (1)
- 1623672204308-Selection To The Post of Tech-III (PM)Document8 pages1623672204308-Selection To The Post of Tech-III (PM)atalrawat205No ratings yet
- Programme - DIES Alumni Forum - Preliminary 2022 - 10.10Document6 pagesProgramme - DIES Alumni Forum - Preliminary 2022 - 10.10D SusiloNo ratings yet
- What Is Research Collaboration?Document19 pagesWhat Is Research Collaboration?adni_wgNo ratings yet
- System Identification ThesisDocument5 pagesSystem Identification Thesisjpcbobkef100% (2)
- Motivation: Archit GuptaDocument19 pagesMotivation: Archit GuptaArchit GuptaNo ratings yet
- Task #8 Reaction Paper Paraisong Uhaw - CAUSAPIN, SHAYE D. - BSMT 3RD YEARDocument6 pagesTask #8 Reaction Paper Paraisong Uhaw - CAUSAPIN, SHAYE D. - BSMT 3RD YEARShaye CausapinNo ratings yet
- G9 Biology Lesson 3.1Document4 pagesG9 Biology Lesson 3.1DahoomNo ratings yet
- Unit 1: Talk 1A: Keeping in Touch I. Write Questions For The Underlined Part of The SentencesDocument103 pagesUnit 1: Talk 1A: Keeping in Touch I. Write Questions For The Underlined Part of The SentencesKadir Sezer ÇiçekNo ratings yet
- Maths Memo Grade 8 June 2011 1Document4 pagesMaths Memo Grade 8 June 2011 123mofokengbokangNo ratings yet
- Personality Development2022 23Document6 pagesPersonality Development2022 23Veena VaishyNo ratings yet
- Answer All Questions Briefly and Correctly!: and Reading Comprehension. According To Your Opinion, Which One The MoreDocument2 pagesAnswer All Questions Briefly and Correctly!: and Reading Comprehension. According To Your Opinion, Which One The Moreita miftahussaidahNo ratings yet
- Aalto MBADocument6 pagesAalto MBADean WinchesterNo ratings yet
- Design and Operation of High-Rate Filters-Part 3Document5 pagesDesign and Operation of High-Rate Filters-Part 3305773253No ratings yet
- Lec 3 (Linked List)Document12 pagesLec 3 (Linked List)Dr LolaNo ratings yet
- Overleaf Amsl Package PDFDocument44 pagesOverleaf Amsl Package PDFBruce LimNo ratings yet
- Encyclopedia of Invasive Species 2 Volumes - From Africanized Honey Bees To Zebra Mussels (PDFDrive)Document873 pagesEncyclopedia of Invasive Species 2 Volumes - From Africanized Honey Bees To Zebra Mussels (PDFDrive)medNo ratings yet
- B.Tech.: RAS-103 RAS - 103Document11 pagesB.Tech.: RAS-103 RAS - 103Tushar Saxena100% (1)
- Carbon Cycle Gizmos LabDocument5 pagesCarbon Cycle Gizmos Labdidua08No ratings yet
- Wade-Kidd (2019) PDFDocument11 pagesWade-Kidd (2019) PDFJ. David Rodríguez MarinNo ratings yet
- Why Developmentally Appropriate Practice (Dap) Is Important in KindergartenDocument10 pagesWhy Developmentally Appropriate Practice (Dap) Is Important in KindergartenJoy MoranoNo ratings yet
- MSC Thesis Defense Presentation - TufailDocument38 pagesMSC Thesis Defense Presentation - TufailNeerajNo ratings yet
- Astm D6431 18Document6 pagesAstm D6431 18Abdul RozaqNo ratings yet
- Rencana Pelaksanaan Pembelajaran (RPP) : School Identity Course Name Class/Semester Topic Discussion Skill Time AllocationDocument6 pagesRencana Pelaksanaan Pembelajaran (RPP) : School Identity Course Name Class/Semester Topic Discussion Skill Time AllocationNadya Septiani RahmanNo ratings yet
- Carbonate ClassificationDocument5 pagesCarbonate ClassificationArpit UpadhyayNo ratings yet