Download as pdf or txt
You might also like
- Solidworks Cswa Exam Question #2Document14 pagesSolidworks Cswa Exam Question #2aldo0% (1)
- ME8451 - Manufacturing Technology - II (Ripped From Amazon Kindle Ebooks by Sai Seena)Document598 pagesME8451 - Manufacturing Technology - II (Ripped From Amazon Kindle Ebooks by Sai Seena)NaveenNo ratings yet
- Questions Chapter 1 4Document97 pagesQuestions Chapter 1 4Rhea Lyn CayobitNo ratings yet
- 1-Mechanics of Orthogonal CuttingDocument31 pages1-Mechanics of Orthogonal CuttingOKELLO JOB LAZARUSNo ratings yet
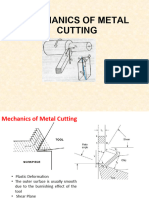
- 5 - Mechanics of Metal Cutting Sanwar Feb29 16Document34 pages5 - Mechanics of Metal Cutting Sanwar Feb29 16mohamedwaziki5No ratings yet
- Mechanics of Metal Cutting 1777Document33 pagesMechanics of Metal Cutting 1777Prabhakara Rao PeekaNo ratings yet
- Single Point CuttingDocument35 pagesSingle Point CuttingCameron GrantNo ratings yet
- BE ME 6th Sem Mechanism-Of-metal-cutting Shivam SharmaDocument17 pagesBE ME 6th Sem Mechanism-Of-metal-cutting Shivam SharmaPrabhakara Rao PeekaNo ratings yet
- WINSEM2018-19 - MEE2006 - ETH - MB110 - VL2018195002136 - Reference Material II - Theory of Metal Cutting Part-3 Machining ForcesMCD (Compatibility Mode) PDFDocument27 pagesWINSEM2018-19 - MEE2006 - ETH - MB110 - VL2018195002136 - Reference Material II - Theory of Metal Cutting Part-3 Machining ForcesMCD (Compatibility Mode) PDFRishabh ChoudharyNo ratings yet
- Mechanics of Metal CuttingDocument33 pagesMechanics of Metal CuttingAmmad NadeemNo ratings yet
- Manufacturing Engineering II Lecture 4Document45 pagesManufacturing Engineering II Lecture 4Eyu KalebNo ratings yet
- ME 305 - 03 Tool GeometryDocument23 pagesME 305 - 03 Tool Geometryme210003069No ratings yet
- Production Engineering I (Meng 3191) : Cutting ForceDocument53 pagesProduction Engineering I (Meng 3191) : Cutting ForceFasil GetachewNo ratings yet
- 0 Mechanics of Metal Cutting-120102095453-Phpapp01Document33 pages0 Mechanics of Metal Cutting-120102095453-Phpapp01VenkateshYadavCivarlaNo ratings yet
- Orthogonal CuttingDocument43 pagesOrthogonal CuttingMuhammad imranNo ratings yet
- 절삭Document29 pages절삭M JNo ratings yet
- Cutting ModellingDocument52 pagesCutting Modellingakkusnihat070No ratings yet
- Theory of Metal CuttingDocument65 pagesTheory of Metal CuttingKhalid BhinderNo ratings yet
- Lecture 4Document19 pagesLecture 4prakash marimuthuNo ratings yet
- Mechanics of Metal CuttingDocument30 pagesMechanics of Metal CuttingSasi ReddyNo ratings yet
- M-11 Fundamentals - of - Machinin ProsmanDocument42 pagesM-11 Fundamentals - of - Machinin ProsmanHafidzNo ratings yet
- Krishna Engineering College Department of Mechanical EngineeringDocument8 pagesKrishna Engineering College Department of Mechanical EngineeringVivek BajpaiNo ratings yet
- ME 303 - 05 Machining I - ÖzerinçDocument33 pagesME 303 - 05 Machining I - ÖzerinçMehmet SalıcıNo ratings yet
- Tool GeometryDocument15 pagesTool GeometryShambhavamNo ratings yet
- MTM 2Document36 pagesMTM 2Abdul Moeed AhmedNo ratings yet
- Figure NC-4427-1 Fillet and Socket Weld Details and DimensionsDocument4 pagesFigure NC-4427-1 Fillet and Socket Weld Details and DimensionsdietersimaNo ratings yet
- Machining MechAnalysis CHPT 2Document53 pagesMachining MechAnalysis CHPT 2Brahim MouchaneNo ratings yet
- Chapter-1 (Con'd) : Fundamentals of Metal Cutting Force and Power in Metal CuttingDocument35 pagesChapter-1 (Con'd) : Fundamentals of Metal Cutting Force and Power in Metal CuttingFira tubeNo ratings yet
- MCMT Unit-I - 2016-17Document30 pagesMCMT Unit-I - 2016-17Sai RamNo ratings yet
- Module 3 - Conventional - Machining PDFDocument44 pagesModule 3 - Conventional - Machining PDFKothapalli Venganna ChowdaryNo ratings yet
- Mechanics of Machining (Metal Cutting) : Version 2 ME IIT, KharagpurDocument13 pagesMechanics of Machining (Metal Cutting) : Version 2 ME IIT, KharagpurvineetNo ratings yet
- 3 Geometry of Single Point Cutting ToolsDocument13 pages3 Geometry of Single Point Cutting Toolsrichardcaroncstj100% (2)
- 08 Material Removal KalpiDocument48 pages08 Material Removal KalpiwatsopNo ratings yet
- Cutting Tool AnglesDocument14 pagesCutting Tool AnglesJayanth ShyamNo ratings yet
- MCTD MannualDocument67 pagesMCTD MannualcoolarunsmartNo ratings yet
- M. Fontaine, A. Devillez, A. Moufki, D. DudzinskiDocument14 pagesM. Fontaine, A. Devillez, A. Moufki, D. DudzinskiOscar RamónNo ratings yet
- Machining PDFDocument25 pagesMachining PDFMukul ChandraNo ratings yet
- 08 Material Removal KalpiDocument48 pages08 Material Removal KalpiDanzoumbé SindeuNo ratings yet
- ME338 - Lecture 4 - Shaping-TurningDocument11 pagesME338 - Lecture 4 - Shaping-TurningVarun PathakNo ratings yet
- Machining of MetalsDocument78 pagesMachining of MetalsKhalid Sheikh100% (1)
- 7 - Cutting Forces & PowerDocument23 pages7 - Cutting Forces & Powerresza100% (1)
- 15MEC304 - Lecture 7Document15 pages15MEC304 - Lecture 7prakash marimuthuNo ratings yet
- Introduction To MachiningDocument45 pagesIntroduction To Machiningitsshri25No ratings yet
- Measuring Surface Roughness: Drawing Symbols (DIN EN ISO 1302:2002)Document1 pageMeasuring Surface Roughness: Drawing Symbols (DIN EN ISO 1302:2002)SudhagarNo ratings yet
- SBP Theory of Metal CuttingDocument39 pagesSBP Theory of Metal CuttingPreet DamaniNo ratings yet
- Machine Tools 2Document70 pagesMachine Tools 2Bhotka BhutkiNo ratings yet
- General Equations For Gear Cutting MachinesDocument4 pagesGeneral Equations For Gear Cutting MachinesMukul JainNo ratings yet
- CIVL6003 2021 Lec4 NotesDocument71 pagesCIVL6003 2021 Lec4 NotesYUK LAM WONGNo ratings yet
- Lecture 4 Metal Cutting ProcessDocument14 pagesLecture 4 Metal Cutting ProcessDhiraj DhimanNo ratings yet
- Tool GeometryDocument66 pagesTool Geometrypotnuru JaivanthNo ratings yet
- Metal Cutting OperationsDocument6 pagesMetal Cutting OperationsNikhil SinghNo ratings yet
- Cylindrical Compression Helix Springs For Suspension SystemsFrom EverandCylindrical Compression Helix Springs For Suspension SystemsNo ratings yet
- An Introduction to Metal-Working (Illustrated)From EverandAn Introduction to Metal-Working (Illustrated)Rating: 2.5 out of 5 stars2.5/5 (2)
- How To Construct Vertical Sections in Ternary Systems: PresentationDocument46 pagesHow To Construct Vertical Sections in Ternary Systems: PresentationMansingh YadavNo ratings yet
- Yf" rt4: ' Fa'/i 6 RTRDocument2 pagesYf" rt4: ' Fa'/i 6 RTRMansingh YadavNo ratings yet
- Q1: IIT Bombay Central Library After Having Gone Through Renovations Is Having A Hard TimeDocument2 pagesQ1: IIT Bombay Central Library After Having Gone Through Renovations Is Having A Hard TimeMansingh YadavNo ratings yet
- ManPro IJan 2020Document5 pagesManPro IJan 2020Mansingh YadavNo ratings yet
- 5A, 6A - High Energy Beam Welding-26, 28-08-2020Document9 pages5A, 6A - High Energy Beam Welding-26, 28-08-2020Mansingh YadavNo ratings yet
- 6B Resistance Spot Welding 28-08-2020Document6 pages6B Resistance Spot Welding 28-08-2020Mansingh YadavNo ratings yet
- Machine Tool LabDocument10 pagesMachine Tool LabMansingh YadavNo ratings yet
- Boothroyd Chap 2 SolutionsDocument10 pagesBoothroyd Chap 2 SolutionsMansingh YadavNo ratings yet
- 4A Fusion Methods 21-08-2020Document4 pages4A Fusion Methods 21-08-2020Mansingh YadavNo ratings yet
- Sample Paper: Math Comprehensive ExaminationDocument2 pagesSample Paper: Math Comprehensive ExaminationMansingh YadavNo ratings yet
- ME673 (S1) Course MapDocument3 pagesME673 (S1) Course MapMansingh YadavNo ratings yet
- Phd Qualifying Exam - April 2020 Manufacturing Processes-Ii: 𝐾cos (Φ−Α) 1+𝐾𝑐𝑜s (Φ−Α) .Sin (Φ−Α)Document7 pagesPhd Qualifying Exam - April 2020 Manufacturing Processes-Ii: 𝐾cos (Φ−Α) 1+𝐾𝑐𝑜s (Φ−Α) .Sin (Φ−Α)Mansingh YadavNo ratings yet
- TWI Endorses IPG QCW Fiber Lasers For Spot Welding Cutting Seam Welding and Drilling ApplicationsDocument1 pageTWI Endorses IPG QCW Fiber Lasers For Spot Welding Cutting Seam Welding and Drilling ApplicationsMansingh YadavNo ratings yet
- CNC ProgrammingDocument20 pagesCNC ProgrammingMansingh YadavNo ratings yet
- Manufacturing Optimization ProblemsDocument61 pagesManufacturing Optimization ProblemsMansingh YadavNo ratings yet
- Biosignals & Biosystems: Block 2. The Z-TransformDocument69 pagesBiosignals & Biosystems: Block 2. The Z-Transformmaria reverteNo ratings yet
- HFS2N60: 600V N-Channel MOSFETDocument7 pagesHFS2N60: 600V N-Channel MOSFETNickol HardwayNo ratings yet
- A 40000 Yr Record of Clay Mineralogy at Lake Towuti Indonesia. Paleoclimate Reconstruction From Reflectance Spectoscropy and Perspective On Paleolake On MarsDocument14 pagesA 40000 Yr Record of Clay Mineralogy at Lake Towuti Indonesia. Paleoclimate Reconstruction From Reflectance Spectoscropy and Perspective On Paleolake On Marssastrika aninditaNo ratings yet
- Seminar 1Document98 pagesSeminar 1Juan Francisco Mayorga JNo ratings yet
- Abstract Algebra Lecture Notes 33Document2 pagesAbstract Algebra Lecture Notes 33TOM DAVISNo ratings yet
- Sainov 2018 IOP Conf. Ser. Mater. Sci. Eng. 365 052016Document7 pagesSainov 2018 IOP Conf. Ser. Mater. Sci. Eng. 365 052016Samoon IbrahimNo ratings yet
- Tension Chord Model For Structural Concrete: Structural Engineering International November 1998Document13 pagesTension Chord Model For Structural Concrete: Structural Engineering International November 1998AmenNo ratings yet
- 2021 Bchs Buea CBC Mock Results Al General RealDocument2 pages2021 Bchs Buea CBC Mock Results Al General RealSimonNo ratings yet
- NotesDocument420 pagesNotesSkNo ratings yet
- Seismic Connections 2perDocument50 pagesSeismic Connections 2perJessica HodgesNo ratings yet
- Vector 1 - by TrockersDocument58 pagesVector 1 - by TrockersFerguson UtseyaNo ratings yet
- Thermodynamics Lecture PDFDocument11 pagesThermodynamics Lecture PDFGenerale, Rey marck C.No ratings yet
- Thermo Acoustic Refrigeration: K.Pavan Kumar Mechanical Dept Vignan Engg College HyderabadDocument23 pagesThermo Acoustic Refrigeration: K.Pavan Kumar Mechanical Dept Vignan Engg College HyderabadAli HassanNo ratings yet
- Lecture 10 - Control Charts For VariableDocument16 pagesLecture 10 - Control Charts For VariableMuhazam Khan Sherbaz KhanNo ratings yet
- Science7 Q3 SLM12 PDFDocument14 pagesScience7 Q3 SLM12 PDFAlfred SolajesNo ratings yet
- Lecture 4 ControlDocument23 pagesLecture 4 ControlPamela ChemutaiNo ratings yet
- Tutorial 8Document2 pagesTutorial 8fawwazfauzi2004No ratings yet
- Debre Berhan University Colla Ge of Engineering Departement of Civil EngineeringDocument15 pagesDebre Berhan University Colla Ge of Engineering Departement of Civil EngineeringMohamed Ahmed Yusuf100% (1)
- Headmistress's Newsletter 202 - 27 January 2023Document7 pagesHeadmistress's Newsletter 202 - 27 January 2023Kate SpainNo ratings yet
- Grilamid® L 25 ANZDocument4 pagesGrilamid® L 25 ANZTUNCAY GUMUSNo ratings yet
- The Fourier Transform and Its Applications-Brad OsgoodDocument428 pagesThe Fourier Transform and Its Applications-Brad OsgoodMark MaoNo ratings yet
- Scanning Electron Microscopy and X-Ray MicroanalysisDocument554 pagesScanning Electron Microscopy and X-Ray MicroanalysisLETÍCIA PAIVA FIORAVANÇONo ratings yet
- Dy DX Ax: Calculus Made EasyDocument6 pagesDy DX Ax: Calculus Made EasyIkhda Wardhani NstNo ratings yet
- ECAT Past Papers (Mathematics Portion) PDFDocument16 pagesECAT Past Papers (Mathematics Portion) PDFtanoligNo ratings yet
- Introduction-Basic Concepts: Pooja GhodasaraDocument18 pagesIntroduction-Basic Concepts: Pooja GhodasaraPooja GhodasaraNo ratings yet
- Unit 3 - Steam and Gas TurbinesDocument94 pagesUnit 3 - Steam and Gas TurbinesDHANASEKAR K IV A 9023No ratings yet
- Development of Equation of Motion For Nonlinear Vibrating SystemsDocument45 pagesDevelopment of Equation of Motion For Nonlinear Vibrating SystemsSteve KrodaNo ratings yet
- Department of MathematicsDocument3 pagesDepartment of MathematicsAtul SharmaNo ratings yet