
00 FEM Part 3
00 FEM Part 3
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Standards.: General Fastener Standards BS OrderDocument33 pagesStandards.: General Fastener Standards BS OrderamdarvishvandNo ratings yet
- Finite Difference, Finite Element, and Finite Volume Method: January 2005Document33 pagesFinite Difference, Finite Element, and Finite Volume Method: January 2005Amanuel GirmaNo ratings yet
- Review On Finite Element Method Erhunmwun, Id Ikponmwosa, UbDocument4 pagesReview On Finite Element Method Erhunmwun, Id Ikponmwosa, UbAmanuel GirmaNo ratings yet
- Comparison of Finite Difference and Finite Element Solutions To The Variably Saturated Flow EquationDocument16 pagesComparison of Finite Difference and Finite Element Solutions To The Variably Saturated Flow EquationAmanuel GirmaNo ratings yet
- E3sconf Caes2020 06057 2Document6 pagesE3sconf Caes2020 06057 2Amanuel GirmaNo ratings yet
- Form-Finding and Buckling Optimisation of Gridshells Using Genetic AlgorithmsDocument6 pagesForm-Finding and Buckling Optimisation of Gridshells Using Genetic AlgorithmsAmanuel GirmaNo ratings yet
- Genetic Algorithm 3Document27 pagesGenetic Algorithm 3Amanuel GirmaNo ratings yet
- 863-Manuscript File-4856-2-10-20201227Document9 pages863-Manuscript File-4856-2-10-20201227Amanuel GirmaNo ratings yet
- Home Security SystemDocument8 pagesHome Security SystemBiplav ChoudhuryNo ratings yet
- Manual Conefor 26Document19 pagesManual Conefor 26J. Francisco Lavado ContadorNo ratings yet
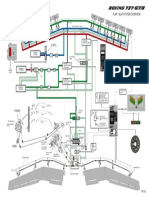
- B737NG - 27 50 A3 01 PDFDocument1 pageB737NG - 27 50 A3 01 PDFMuhammed MudassirNo ratings yet
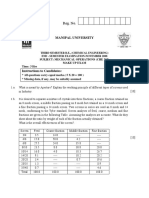
- Mechanical Operations (CHE-205) (Makeup) (EngineeringDuniya - Com)Document3 pagesMechanical Operations (CHE-205) (Makeup) (EngineeringDuniya - Com)Cester Avila Ducusin100% (1)
- 3G StandardsDocument7 pages3G StandardsIsmet KoracNo ratings yet
- Coating Inspection Services For Wind FarmsDocument2 pagesCoating Inspection Services For Wind FarmsAkki SaudiNo ratings yet
- Quinsyn Compressor FluidsDocument6 pagesQuinsyn Compressor FluidsRoberto AlfaroNo ratings yet
- SOP-T-0005 - Standard Operating (Test) Procedure - CUBE TESTDocument18 pagesSOP-T-0005 - Standard Operating (Test) Procedure - CUBE TESTAvidip DeyNo ratings yet
- Perencanaan Pelat LantaiDocument16 pagesPerencanaan Pelat LantaiNelson AugustoneNo ratings yet
- Surfcam 2014 r2 - 32bitDocument152 pagesSurfcam 2014 r2 - 32bitClaudio HinojozaNo ratings yet
- Catalog Bencomp Brosura Engleza 2018Document12 pagesCatalog Bencomp Brosura Engleza 2018sergiu9886No ratings yet
- 4.9.1. Precipitation HardeningDocument5 pages4.9.1. Precipitation HardeningVinothKumarVinothNo ratings yet
- Extension of MDRRMO OfficeDocument12 pagesExtension of MDRRMO OfficeJustin YuabNo ratings yet
- 2D CFD Transient Analysis of Darrieus H Type Vertical Axis Wind TurbineDocument43 pages2D CFD Transient Analysis of Darrieus H Type Vertical Axis Wind TurbinekaushikNo ratings yet
- BCS 051 Solved AssignmentsDocument11 pagesBCS 051 Solved AssignmentsAmit GuptaNo ratings yet
- Prácticas de GMDocument45 pagesPrácticas de GMJefatura Diseño IndustrialNo ratings yet
- Solar Photovoltaic Wire 600V: DescriptionDocument1 pageSolar Photovoltaic Wire 600V: DescriptionAMARENDRA SINo ratings yet
- Canopy Install TipsDocument1 pageCanopy Install Tipsengine wangNo ratings yet
- Ecv 203Document2 pagesEcv 203Civil EngineeringNo ratings yet
- Science:, 792 (2003) Robin D. Rogers and Kenneth R. SeddonDocument3 pagesScience:, 792 (2003) Robin D. Rogers and Kenneth R. SeddonJohnSmithNo ratings yet
- Firmware Update by Telnet v11.2Document7 pagesFirmware Update by Telnet v11.2adiskylineNo ratings yet
- Hzt. Ammar e Yaser (R.a.)Document88 pagesHzt. Ammar e Yaser (R.a.)naqvi202No ratings yet
- Pipe Size CalculationDocument42 pagesPipe Size CalculationfelipeNo ratings yet
- Calculating Weld Volume and Weight: Welding CostsDocument4 pagesCalculating Weld Volume and Weight: Welding CostsMehmet SoysalNo ratings yet
- Exercícios - Resistência Dos MateriaisDocument7 pagesExercícios - Resistência Dos MateriaisVinícius AntunesNo ratings yet
- Solar Brochure February 2023Document24 pagesSolar Brochure February 2023prakistaoNo ratings yet
- Kone3000S Minispace™Scenic Car Technical Information For SalesDocument11 pagesKone3000S Minispace™Scenic Car Technical Information For SalesYaşar EKNo ratings yet
- MAT 3421 MCGB - Data Sheet For Suppliers Old MAT No.: 362Document3 pagesMAT 3421 MCGB - Data Sheet For Suppliers Old MAT No.: 362Diógenes da Silva Pereira100% (1)
- Satellite's Footprints Over MexicoDocument2 pagesSatellite's Footprints Over MexicoAntonio CarrilloNo ratings yet












































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Standards.: General Fastener Standards BS OrderDocument33 pagesStandards.: General Fastener Standards BS OrderamdarvishvandNo ratings yet
- Finite Difference, Finite Element, and Finite Volume Method: January 2005Document33 pagesFinite Difference, Finite Element, and Finite Volume Method: January 2005Amanuel GirmaNo ratings yet
- Review On Finite Element Method Erhunmwun, Id Ikponmwosa, UbDocument4 pagesReview On Finite Element Method Erhunmwun, Id Ikponmwosa, UbAmanuel GirmaNo ratings yet
- Comparison of Finite Difference and Finite Element Solutions To The Variably Saturated Flow EquationDocument16 pagesComparison of Finite Difference and Finite Element Solutions To The Variably Saturated Flow EquationAmanuel GirmaNo ratings yet
- E3sconf Caes2020 06057 2Document6 pagesE3sconf Caes2020 06057 2Amanuel GirmaNo ratings yet
- Form-Finding and Buckling Optimisation of Gridshells Using Genetic AlgorithmsDocument6 pagesForm-Finding and Buckling Optimisation of Gridshells Using Genetic AlgorithmsAmanuel GirmaNo ratings yet
- Genetic Algorithm 3Document27 pagesGenetic Algorithm 3Amanuel GirmaNo ratings yet
- 863-Manuscript File-4856-2-10-20201227Document9 pages863-Manuscript File-4856-2-10-20201227Amanuel GirmaNo ratings yet
- Home Security SystemDocument8 pagesHome Security SystemBiplav ChoudhuryNo ratings yet
- Manual Conefor 26Document19 pagesManual Conefor 26J. Francisco Lavado ContadorNo ratings yet
- B737NG - 27 50 A3 01 PDFDocument1 pageB737NG - 27 50 A3 01 PDFMuhammed MudassirNo ratings yet
- Mechanical Operations (CHE-205) (Makeup) (EngineeringDuniya - Com)Document3 pagesMechanical Operations (CHE-205) (Makeup) (EngineeringDuniya - Com)Cester Avila Ducusin100% (1)
- 3G StandardsDocument7 pages3G StandardsIsmet KoracNo ratings yet
- Coating Inspection Services For Wind FarmsDocument2 pagesCoating Inspection Services For Wind FarmsAkki SaudiNo ratings yet
- Quinsyn Compressor FluidsDocument6 pagesQuinsyn Compressor FluidsRoberto AlfaroNo ratings yet
- SOP-T-0005 - Standard Operating (Test) Procedure - CUBE TESTDocument18 pagesSOP-T-0005 - Standard Operating (Test) Procedure - CUBE TESTAvidip DeyNo ratings yet
- Perencanaan Pelat LantaiDocument16 pagesPerencanaan Pelat LantaiNelson AugustoneNo ratings yet
- Surfcam 2014 r2 - 32bitDocument152 pagesSurfcam 2014 r2 - 32bitClaudio HinojozaNo ratings yet
- Catalog Bencomp Brosura Engleza 2018Document12 pagesCatalog Bencomp Brosura Engleza 2018sergiu9886No ratings yet
- 4.9.1. Precipitation HardeningDocument5 pages4.9.1. Precipitation HardeningVinothKumarVinothNo ratings yet
- Extension of MDRRMO OfficeDocument12 pagesExtension of MDRRMO OfficeJustin YuabNo ratings yet
- 2D CFD Transient Analysis of Darrieus H Type Vertical Axis Wind TurbineDocument43 pages2D CFD Transient Analysis of Darrieus H Type Vertical Axis Wind TurbinekaushikNo ratings yet
- BCS 051 Solved AssignmentsDocument11 pagesBCS 051 Solved AssignmentsAmit GuptaNo ratings yet
- Prácticas de GMDocument45 pagesPrácticas de GMJefatura Diseño IndustrialNo ratings yet
- Solar Photovoltaic Wire 600V: DescriptionDocument1 pageSolar Photovoltaic Wire 600V: DescriptionAMARENDRA SINo ratings yet
- Canopy Install TipsDocument1 pageCanopy Install Tipsengine wangNo ratings yet
- Ecv 203Document2 pagesEcv 203Civil EngineeringNo ratings yet
- Science:, 792 (2003) Robin D. Rogers and Kenneth R. SeddonDocument3 pagesScience:, 792 (2003) Robin D. Rogers and Kenneth R. SeddonJohnSmithNo ratings yet
- Firmware Update by Telnet v11.2Document7 pagesFirmware Update by Telnet v11.2adiskylineNo ratings yet
- Hzt. Ammar e Yaser (R.a.)Document88 pagesHzt. Ammar e Yaser (R.a.)naqvi202No ratings yet
- Pipe Size CalculationDocument42 pagesPipe Size CalculationfelipeNo ratings yet
- Calculating Weld Volume and Weight: Welding CostsDocument4 pagesCalculating Weld Volume and Weight: Welding CostsMehmet SoysalNo ratings yet
- Exercícios - Resistência Dos MateriaisDocument7 pagesExercícios - Resistência Dos MateriaisVinícius AntunesNo ratings yet
- Solar Brochure February 2023Document24 pagesSolar Brochure February 2023prakistaoNo ratings yet
- Kone3000S Minispace™Scenic Car Technical Information For SalesDocument11 pagesKone3000S Minispace™Scenic Car Technical Information For SalesYaşar EKNo ratings yet
- MAT 3421 MCGB - Data Sheet For Suppliers Old MAT No.: 362Document3 pagesMAT 3421 MCGB - Data Sheet For Suppliers Old MAT No.: 362Diógenes da Silva Pereira100% (1)
- Satellite's Footprints Over MexicoDocument2 pagesSatellite's Footprints Over MexicoAntonio CarrilloNo ratings yet