
Introduc) On: Lecture 1: Evolution of Computer System Lecture 1: Evolution of Computer System
Introduc) On: Lecture 1: Evolution of Computer System Lecture 1: Evolution of Computer System
You might also like
- Defigard 4000: Service ManualDocument90 pagesDefigard 4000: Service ManualKamel Kamel100% (15)
- Generator Repair StepsDocument15 pagesGenerator Repair Stepsimran_aftech100% (3)
- Amf 90XLi, XLi KlavuzuDocument232 pagesAmf 90XLi, XLi KlavuzuTaner ineviNo ratings yet
- IEEE 115 Measure Shaft VoltageDocument36 pagesIEEE 115 Measure Shaft Voltagepklake1036100% (5)
- Chapter-1 Microprocessor-Introduction DS Baral 1679935924718Document42 pagesChapter-1 Microprocessor-Introduction DS Baral 1679935924718Yugesh K. C.No ratings yet
- Introduction and Motivation VLSI Circuit PDFDocument76 pagesIntroduction and Motivation VLSI Circuit PDFAnonymous qwZHnIhqJ4No ratings yet
- Chapter-2 Innovations & Inventions in Computer Science & Engineering/ Information Technology CST-156Document33 pagesChapter-2 Innovations & Inventions in Computer Science & Engineering/ Information Technology CST-156Mohit BihaniNo ratings yet
- Unit-1 ACADocument86 pagesUnit-1 ACArestin069No ratings yet
- Application of Computer in EconomicsDocument194 pagesApplication of Computer in EconomicskanishkaNo ratings yet
- Lecture 1 - IntroChapter 1Document54 pagesLecture 1 - IntroChapter 1Rana EL ArabeNo ratings yet
- CHAPTER 1 Introduction PDFDocument31 pagesCHAPTER 1 Introduction PDFcudarunNo ratings yet
- 01 IntroductionDocument11 pages01 IntroductionAhana SahaNo ratings yet
- Module1 - Overview of Computer Architecture & Organization - FinalDocument46 pagesModule1 - Overview of Computer Architecture & Organization - FinaljbdNo ratings yet
- Cs 1Document30 pagesCs 1Rashmitha RavichandranNo ratings yet
- 8085 AllDocument165 pages8085 AllLavanya DevallaNo ratings yet
- Subject: - Evolution of Information Technology (IT)Document30 pagesSubject: - Evolution of Information Technology (IT)EyaminNo ratings yet
- Comp108 - Introduction To Computer ArchitectureDocument25 pagesComp108 - Introduction To Computer ArchitectureBorotho MolemoNo ratings yet
- 1 2 Introduction MC Part2Document9 pages1 2 Introduction MC Part2Buțu Andreea-MariaNo ratings yet
- How Chips Are DesignedDocument46 pagesHow Chips Are DesignedAli AhmadNo ratings yet
- Computer Architecture CHAPTER 1Document47 pagesComputer Architecture CHAPTER 1ShaarvinNo ratings yet
- Chapter1 CADocument14 pagesChapter1 CAPhan HuyNo ratings yet
- Embedded 1Document109 pagesEmbedded 1SHUBHANKAR SONINo ratings yet
- Lecture 01Document44 pagesLecture 01Mihin ManviduNo ratings yet
- Live Crash Course - Computer Awareness - Session 1Document32 pagesLive Crash Course - Computer Awareness - Session 1Sushmita SinghNo ratings yet
- Seminar 433Document36 pagesSeminar 433Midhun LNo ratings yet
- Unit-I: Introduction To ComputersDocument144 pagesUnit-I: Introduction To ComputersshibhiNo ratings yet
- Operating System Cosc2032 Cosc2032 Operating SystemDocument11 pagesOperating System Cosc2032 Cosc2032 Operating Systemfasika tafaNo ratings yet
- Lecture 1Document13 pagesLecture 1Ahmed -j-aNo ratings yet
- Computer Architecture I Lecture Presentation 1Document37 pagesComputer Architecture I Lecture Presentation 1malkovan100% (2)
- Computer Organization and ArchitectureDocument22 pagesComputer Organization and ArchitectureNeel RavalNo ratings yet
- Contact: Computer Organization and ArchitectureDocument14 pagesContact: Computer Organization and Architecturewooo24No ratings yet
- II. Basic Concepts in CSS PDFDocument54 pagesII. Basic Concepts in CSS PDFRoss Armyr GeliNo ratings yet
- 1 IntroductionDocument25 pages1 IntroductionPrateek TiwariNo ratings yet
- IEEE Quantum Computing SummitDocument22 pagesIEEE Quantum Computing SummitTarek SeguirNo ratings yet
- Computer Systems: End User and Enterprise ComputingDocument64 pagesComputer Systems: End User and Enterprise ComputinghaleemNo ratings yet
- Week 2 CSC101 Introduction To Computer ScienceDocument30 pagesWeek 2 CSC101 Introduction To Computer Sciencekoladejoy49No ratings yet
- Micro Unit 1Document87 pagesMicro Unit 1Michael Adu-boahenNo ratings yet
- CSS224 Lec1Document30 pagesCSS224 Lec1makehappyincNo ratings yet
- Introduction To Computer Structure CPU, 8805 Assembly Language v12Document9 pagesIntroduction To Computer Structure CPU, 8805 Assembly Language v12Abhinav SinghNo ratings yet
- MIT01Document77 pagesMIT01FarhanJavedNo ratings yet
- ES106-CFP-Module 1 - Computer OrganizationDocument13 pagesES106-CFP-Module 1 - Computer OrganizationSonny Mae TuboNo ratings yet
- Lecture1 Orkom 19Document33 pagesLecture1 Orkom 19FAYYDHRNo ratings yet
- Computer StructureDocument5 pagesComputer StructureAbhinav SinghNo ratings yet
- Elektor (Nonlinear - Ir) 2009-04 PDFDocument88 pagesElektor (Nonlinear - Ir) 2009-04 PDFdangkhuyenmaiNo ratings yet
- DSDDocument31 pagesDSDMvZ509No ratings yet
- History of Computers FinalDocument39 pagesHistory of Computers Finalapi-247871582No ratings yet
- Introduction To Computer ScienceDocument40 pagesIntroduction To Computer ScienceobumnwabudeNo ratings yet
- Computer BasicsDocument409 pagesComputer Basicsmukesh_kumar_470% (1)
- MECA587 Advanced Digital Design For Mechatronics: The Origin of Moore's Law ... and Its ConsequencesDocument58 pagesMECA587 Advanced Digital Design For Mechatronics: The Origin of Moore's Law ... and Its ConsequencesKourosh KhashayarNo ratings yet
- CS 352: Computer Systems ArchitectureDocument23 pagesCS 352: Computer Systems ArchitecturekchaitanyakNo ratings yet
- Introduction To Computer: by Kiramat Rahman Department of Computer & Software TechnologyDocument48 pagesIntroduction To Computer: by Kiramat Rahman Department of Computer & Software TechnologydangermanNo ratings yet
- Computer Basics ElementsDocument413 pagesComputer Basics ElementsFaquir Sanoar SanyNo ratings yet
- EELE 461/561 - Digital System Design - Interconnect Construction (Printed Circuit Boards) Printed Circuit BoardsDocument11 pagesEELE 461/561 - Digital System Design - Interconnect Construction (Printed Circuit Boards) Printed Circuit BoardsMr. MANTRANo ratings yet
- CompArch CH 1 1Document23 pagesCompArch CH 1 1Esuyawkal AdugnaNo ratings yet
- Lesson2 Jan20Document32 pagesLesson2 Jan20Yilma AbiyNo ratings yet
- Computer Application For Young Children (DECE 1113) : Introduction To Educational TechnologyDocument21 pagesComputer Application For Young Children (DECE 1113) : Introduction To Educational TechnologysanjuNo ratings yet
- Unit 1Document89 pagesUnit 1Ashish kumarNo ratings yet
- Lanka LankaDocument31 pagesLanka LankaNuwanNo ratings yet
- Micro-Project Report On Two Ripple Counter: 1.0 RationaleDocument8 pagesMicro-Project Report On Two Ripple Counter: 1.0 RationaleavishkarNo ratings yet
- Chapt1 Computer ArchitectureDocument50 pagesChapt1 Computer ArchitecturePetro BahaNo ratings yet
- COMPUTER: Introduction: DR Meera Department of Library and Information Science Delhi UniversityDocument32 pagesCOMPUTER: Introduction: DR Meera Department of Library and Information Science Delhi UniversityVikas KumarNo ratings yet
- Pre Mechanicak PDFDocument52 pagesPre Mechanicak PDFCrazy MeNo ratings yet
- CAP Unit1 Part1 FundamentalsDocument73 pagesCAP Unit1 Part1 FundamentalsMelikamu LiyihNo ratings yet
- StringsDocument142 pagesStringsAntepNo ratings yet
- Syllabus Deg EtceDocument54 pagesSyllabus Deg EtceBiplab Kumar SinhaNo ratings yet
- SVC A02-0100Document16 pagesSVC A02-0100Christian NgalaNo ratings yet
- Socket 478 Pentium 4-M: P/N: KK0G550011010Document0 pagesSocket 478 Pentium 4-M: P/N: KK0G550011010taraservNo ratings yet
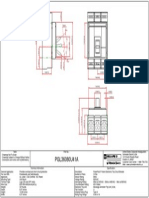
- PGL36080U41ADocument1 pagePGL36080U41AEduardo CarrilloNo ratings yet
- Common Wire Splices and JointsDocument2 pagesCommon Wire Splices and JointsZdehc Oilut YajNo ratings yet
- Scout-Pro-Service-Manual BalanzaDocument40 pagesScout-Pro-Service-Manual BalanzaAlexander SanchezNo ratings yet
- Application Notes: Measuring The Non-Rigid Behaviour of A Loudspeaker Diaphragm Using Modal AnalysisDocument8 pagesApplication Notes: Measuring The Non-Rigid Behaviour of A Loudspeaker Diaphragm Using Modal Analysisjhon vargasNo ratings yet
- The Leader in Low-Cost, Remote Monitoring SolutionsDocument5 pagesThe Leader in Low-Cost, Remote Monitoring Solutionsthanggimme.phanNo ratings yet
- UM vB02S (EN) K-900Document49 pagesUM vB02S (EN) K-900Alejandro Lalama GuerreroNo ratings yet
- (A) Clocked R-S (B) J-KDocument5 pages(A) Clocked R-S (B) J-KVinnu KumarNo ratings yet
- Module 4 - Physical LayerDocument26 pagesModule 4 - Physical LayerMark SandovalNo ratings yet
- EBL512 G3 DrawingsDocument33 pagesEBL512 G3 DrawingsDanNo ratings yet
- Power: General Specification Control and Protection SpecificationsDocument2 pagesPower: General Specification Control and Protection Specificationsalexis oliveraNo ratings yet
- Brosur TAU - BIGDocument4 pagesBrosur TAU - BIGnico_ajjaNo ratings yet
- Design For Test: Digital Integrated Circuits © Prentice Hall 1995 Design MethodologiesDocument24 pagesDesign For Test: Digital Integrated Circuits © Prentice Hall 1995 Design Methodologiesanand_duraiswamyNo ratings yet
- BS en 12953-9-2007Document40 pagesBS en 12953-9-2007Kishanshetty100% (1)
- Am024nn1dch AzDocument1 pageAm024nn1dch AzHelen Cardenas HonoresNo ratings yet
- RCM420 D00057 D XxenDocument6 pagesRCM420 D00057 D XxenjoaotgilNo ratings yet
- Sony hcd-hpz7 hpz9 Ver-1.1 PDFDocument112 pagesSony hcd-hpz7 hpz9 Ver-1.1 PDFperro sNo ratings yet
- Mobile Hotspot Franklin Wireless R717 Getting Started GuideDocument13 pagesMobile Hotspot Franklin Wireless R717 Getting Started GuideLuis Ethiel Rivera RamosNo ratings yet
- Department of EJ/EN/EQ/ET/EX 22428 DSC MCQ (Digital Communication System)Document20 pagesDepartment of EJ/EN/EQ/ET/EX 22428 DSC MCQ (Digital Communication System)Saquibh ShaikhNo ratings yet
- Electronics-Communication Engineering Microwave-Engineering Microwave-Diodes NotesDocument31 pagesElectronics-Communication Engineering Microwave-Engineering Microwave-Diodes NotesSoundararajan RajagopalanNo ratings yet
- Celeste, Kristel Joyce V. Design of Experiments With Several FactorsQUIZDocument5 pagesCeleste, Kristel Joyce V. Design of Experiments With Several FactorsQUIZMarlNo ratings yet
- Fig. 1. Flyback Converter With Conventional Lossless LCD Snubber. Fig. 2. Flyback Converter With The Proposed Lossless LCD SnubberDocument1 pageFig. 1. Flyback Converter With Conventional Lossless LCD Snubber. Fig. 2. Flyback Converter With The Proposed Lossless LCD SnubberElyes MbarekNo ratings yet
- Y7 Prime 2019 Schematics (Phonelumi - Com)Document36 pagesY7 Prime 2019 Schematics (Phonelumi - Com)josegutierrez905No ratings yet
























































































Download as pdf or txt
You might also like
- Defigard 4000: Service ManualDocument90 pagesDefigard 4000: Service ManualKamel Kamel100% (15)
- Generator Repair StepsDocument15 pagesGenerator Repair Stepsimran_aftech100% (3)
- Amf 90XLi, XLi KlavuzuDocument232 pagesAmf 90XLi, XLi KlavuzuTaner ineviNo ratings yet
- IEEE 115 Measure Shaft VoltageDocument36 pagesIEEE 115 Measure Shaft Voltagepklake1036100% (5)
- Chapter-1 Microprocessor-Introduction DS Baral 1679935924718Document42 pagesChapter-1 Microprocessor-Introduction DS Baral 1679935924718Yugesh K. C.No ratings yet
- Introduction and Motivation VLSI Circuit PDFDocument76 pagesIntroduction and Motivation VLSI Circuit PDFAnonymous qwZHnIhqJ4No ratings yet
- Chapter-2 Innovations & Inventions in Computer Science & Engineering/ Information Technology CST-156Document33 pagesChapter-2 Innovations & Inventions in Computer Science & Engineering/ Information Technology CST-156Mohit BihaniNo ratings yet
- Unit-1 ACADocument86 pagesUnit-1 ACArestin069No ratings yet
- Application of Computer in EconomicsDocument194 pagesApplication of Computer in EconomicskanishkaNo ratings yet
- Lecture 1 - IntroChapter 1Document54 pagesLecture 1 - IntroChapter 1Rana EL ArabeNo ratings yet
- CHAPTER 1 Introduction PDFDocument31 pagesCHAPTER 1 Introduction PDFcudarunNo ratings yet
- 01 IntroductionDocument11 pages01 IntroductionAhana SahaNo ratings yet
- Module1 - Overview of Computer Architecture & Organization - FinalDocument46 pagesModule1 - Overview of Computer Architecture & Organization - FinaljbdNo ratings yet
- Cs 1Document30 pagesCs 1Rashmitha RavichandranNo ratings yet
- 8085 AllDocument165 pages8085 AllLavanya DevallaNo ratings yet
- Subject: - Evolution of Information Technology (IT)Document30 pagesSubject: - Evolution of Information Technology (IT)EyaminNo ratings yet
- Comp108 - Introduction To Computer ArchitectureDocument25 pagesComp108 - Introduction To Computer ArchitectureBorotho MolemoNo ratings yet
- 1 2 Introduction MC Part2Document9 pages1 2 Introduction MC Part2Buțu Andreea-MariaNo ratings yet
- How Chips Are DesignedDocument46 pagesHow Chips Are DesignedAli AhmadNo ratings yet
- Computer Architecture CHAPTER 1Document47 pagesComputer Architecture CHAPTER 1ShaarvinNo ratings yet
- Chapter1 CADocument14 pagesChapter1 CAPhan HuyNo ratings yet
- Embedded 1Document109 pagesEmbedded 1SHUBHANKAR SONINo ratings yet
- Lecture 01Document44 pagesLecture 01Mihin ManviduNo ratings yet
- Live Crash Course - Computer Awareness - Session 1Document32 pagesLive Crash Course - Computer Awareness - Session 1Sushmita SinghNo ratings yet
- Seminar 433Document36 pagesSeminar 433Midhun LNo ratings yet
- Unit-I: Introduction To ComputersDocument144 pagesUnit-I: Introduction To ComputersshibhiNo ratings yet
- Operating System Cosc2032 Cosc2032 Operating SystemDocument11 pagesOperating System Cosc2032 Cosc2032 Operating Systemfasika tafaNo ratings yet
- Lecture 1Document13 pagesLecture 1Ahmed -j-aNo ratings yet
- Computer Architecture I Lecture Presentation 1Document37 pagesComputer Architecture I Lecture Presentation 1malkovan100% (2)
- Computer Organization and ArchitectureDocument22 pagesComputer Organization and ArchitectureNeel RavalNo ratings yet
- Contact: Computer Organization and ArchitectureDocument14 pagesContact: Computer Organization and Architecturewooo24No ratings yet
- II. Basic Concepts in CSS PDFDocument54 pagesII. Basic Concepts in CSS PDFRoss Armyr GeliNo ratings yet
- 1 IntroductionDocument25 pages1 IntroductionPrateek TiwariNo ratings yet
- IEEE Quantum Computing SummitDocument22 pagesIEEE Quantum Computing SummitTarek SeguirNo ratings yet
- Computer Systems: End User and Enterprise ComputingDocument64 pagesComputer Systems: End User and Enterprise ComputinghaleemNo ratings yet
- Week 2 CSC101 Introduction To Computer ScienceDocument30 pagesWeek 2 CSC101 Introduction To Computer Sciencekoladejoy49No ratings yet
- Micro Unit 1Document87 pagesMicro Unit 1Michael Adu-boahenNo ratings yet
- CSS224 Lec1Document30 pagesCSS224 Lec1makehappyincNo ratings yet
- Introduction To Computer Structure CPU, 8805 Assembly Language v12Document9 pagesIntroduction To Computer Structure CPU, 8805 Assembly Language v12Abhinav SinghNo ratings yet
- MIT01Document77 pagesMIT01FarhanJavedNo ratings yet
- ES106-CFP-Module 1 - Computer OrganizationDocument13 pagesES106-CFP-Module 1 - Computer OrganizationSonny Mae TuboNo ratings yet
- Lecture1 Orkom 19Document33 pagesLecture1 Orkom 19FAYYDHRNo ratings yet
- Computer StructureDocument5 pagesComputer StructureAbhinav SinghNo ratings yet
- Elektor (Nonlinear - Ir) 2009-04 PDFDocument88 pagesElektor (Nonlinear - Ir) 2009-04 PDFdangkhuyenmaiNo ratings yet
- DSDDocument31 pagesDSDMvZ509No ratings yet
- History of Computers FinalDocument39 pagesHistory of Computers Finalapi-247871582No ratings yet
- Introduction To Computer ScienceDocument40 pagesIntroduction To Computer ScienceobumnwabudeNo ratings yet
- Computer BasicsDocument409 pagesComputer Basicsmukesh_kumar_470% (1)
- MECA587 Advanced Digital Design For Mechatronics: The Origin of Moore's Law ... and Its ConsequencesDocument58 pagesMECA587 Advanced Digital Design For Mechatronics: The Origin of Moore's Law ... and Its ConsequencesKourosh KhashayarNo ratings yet
- CS 352: Computer Systems ArchitectureDocument23 pagesCS 352: Computer Systems ArchitecturekchaitanyakNo ratings yet
- Introduction To Computer: by Kiramat Rahman Department of Computer & Software TechnologyDocument48 pagesIntroduction To Computer: by Kiramat Rahman Department of Computer & Software TechnologydangermanNo ratings yet
- Computer Basics ElementsDocument413 pagesComputer Basics ElementsFaquir Sanoar SanyNo ratings yet
- EELE 461/561 - Digital System Design - Interconnect Construction (Printed Circuit Boards) Printed Circuit BoardsDocument11 pagesEELE 461/561 - Digital System Design - Interconnect Construction (Printed Circuit Boards) Printed Circuit BoardsMr. MANTRANo ratings yet
- CompArch CH 1 1Document23 pagesCompArch CH 1 1Esuyawkal AdugnaNo ratings yet
- Lesson2 Jan20Document32 pagesLesson2 Jan20Yilma AbiyNo ratings yet
- Computer Application For Young Children (DECE 1113) : Introduction To Educational TechnologyDocument21 pagesComputer Application For Young Children (DECE 1113) : Introduction To Educational TechnologysanjuNo ratings yet
- Unit 1Document89 pagesUnit 1Ashish kumarNo ratings yet
- Lanka LankaDocument31 pagesLanka LankaNuwanNo ratings yet
- Micro-Project Report On Two Ripple Counter: 1.0 RationaleDocument8 pagesMicro-Project Report On Two Ripple Counter: 1.0 RationaleavishkarNo ratings yet
- Chapt1 Computer ArchitectureDocument50 pagesChapt1 Computer ArchitecturePetro BahaNo ratings yet
- COMPUTER: Introduction: DR Meera Department of Library and Information Science Delhi UniversityDocument32 pagesCOMPUTER: Introduction: DR Meera Department of Library and Information Science Delhi UniversityVikas KumarNo ratings yet
- Pre Mechanicak PDFDocument52 pagesPre Mechanicak PDFCrazy MeNo ratings yet
- CAP Unit1 Part1 FundamentalsDocument73 pagesCAP Unit1 Part1 FundamentalsMelikamu LiyihNo ratings yet
- StringsDocument142 pagesStringsAntepNo ratings yet
- Syllabus Deg EtceDocument54 pagesSyllabus Deg EtceBiplab Kumar SinhaNo ratings yet
- SVC A02-0100Document16 pagesSVC A02-0100Christian NgalaNo ratings yet
- Socket 478 Pentium 4-M: P/N: KK0G550011010Document0 pagesSocket 478 Pentium 4-M: P/N: KK0G550011010taraservNo ratings yet
- PGL36080U41ADocument1 pagePGL36080U41AEduardo CarrilloNo ratings yet
- Common Wire Splices and JointsDocument2 pagesCommon Wire Splices and JointsZdehc Oilut YajNo ratings yet
- Scout-Pro-Service-Manual BalanzaDocument40 pagesScout-Pro-Service-Manual BalanzaAlexander SanchezNo ratings yet
- Application Notes: Measuring The Non-Rigid Behaviour of A Loudspeaker Diaphragm Using Modal AnalysisDocument8 pagesApplication Notes: Measuring The Non-Rigid Behaviour of A Loudspeaker Diaphragm Using Modal Analysisjhon vargasNo ratings yet
- The Leader in Low-Cost, Remote Monitoring SolutionsDocument5 pagesThe Leader in Low-Cost, Remote Monitoring Solutionsthanggimme.phanNo ratings yet
- UM vB02S (EN) K-900Document49 pagesUM vB02S (EN) K-900Alejandro Lalama GuerreroNo ratings yet
- (A) Clocked R-S (B) J-KDocument5 pages(A) Clocked R-S (B) J-KVinnu KumarNo ratings yet
- Module 4 - Physical LayerDocument26 pagesModule 4 - Physical LayerMark SandovalNo ratings yet
- EBL512 G3 DrawingsDocument33 pagesEBL512 G3 DrawingsDanNo ratings yet
- Power: General Specification Control and Protection SpecificationsDocument2 pagesPower: General Specification Control and Protection Specificationsalexis oliveraNo ratings yet
- Brosur TAU - BIGDocument4 pagesBrosur TAU - BIGnico_ajjaNo ratings yet
- Design For Test: Digital Integrated Circuits © Prentice Hall 1995 Design MethodologiesDocument24 pagesDesign For Test: Digital Integrated Circuits © Prentice Hall 1995 Design Methodologiesanand_duraiswamyNo ratings yet
- BS en 12953-9-2007Document40 pagesBS en 12953-9-2007Kishanshetty100% (1)
- Am024nn1dch AzDocument1 pageAm024nn1dch AzHelen Cardenas HonoresNo ratings yet
- RCM420 D00057 D XxenDocument6 pagesRCM420 D00057 D XxenjoaotgilNo ratings yet
- Sony hcd-hpz7 hpz9 Ver-1.1 PDFDocument112 pagesSony hcd-hpz7 hpz9 Ver-1.1 PDFperro sNo ratings yet
- Mobile Hotspot Franklin Wireless R717 Getting Started GuideDocument13 pagesMobile Hotspot Franklin Wireless R717 Getting Started GuideLuis Ethiel Rivera RamosNo ratings yet
- Department of EJ/EN/EQ/ET/EX 22428 DSC MCQ (Digital Communication System)Document20 pagesDepartment of EJ/EN/EQ/ET/EX 22428 DSC MCQ (Digital Communication System)Saquibh ShaikhNo ratings yet
- Electronics-Communication Engineering Microwave-Engineering Microwave-Diodes NotesDocument31 pagesElectronics-Communication Engineering Microwave-Engineering Microwave-Diodes NotesSoundararajan RajagopalanNo ratings yet
- Celeste, Kristel Joyce V. Design of Experiments With Several FactorsQUIZDocument5 pagesCeleste, Kristel Joyce V. Design of Experiments With Several FactorsQUIZMarlNo ratings yet
- Fig. 1. Flyback Converter With Conventional Lossless LCD Snubber. Fig. 2. Flyback Converter With The Proposed Lossless LCD SnubberDocument1 pageFig. 1. Flyback Converter With Conventional Lossless LCD Snubber. Fig. 2. Flyback Converter With The Proposed Lossless LCD SnubberElyes MbarekNo ratings yet
- Y7 Prime 2019 Schematics (Phonelumi - Com)Document36 pagesY7 Prime 2019 Schematics (Phonelumi - Com)josegutierrez905No ratings yet