
Robot Móvil Autónomo Con Desplazamientos en Plano Vertical y Aplicaciones en Servicios de Limpieza
Robot Móvil Autónomo Con Desplazamientos en Plano Vertical y Aplicaciones en Servicios de Limpieza
You might also like
- Fault Code 324 Injector Solenoid Driver Cylinder 3 Circuit - Current Below Normal, or Open CircuitDocument26 pagesFault Code 324 Injector Solenoid Driver Cylinder 3 Circuit - Current Below Normal, or Open CircuitAhmedmahNo ratings yet
- Ft4 Gas Turbine Installation HadbookDocument3 pagesFt4 Gas Turbine Installation HadbookGabriela Sanchez100% (3)
- Massenza Mi4 Manual PDFDocument44 pagesMassenza Mi4 Manual PDFsean100% (2)
- Chapter 5 Deutz EMR 2 Fault Codes NewDocument8 pagesChapter 5 Deutz EMR 2 Fault Codes NewLhsan RajawiNo ratings yet
- Project Report PDFDocument4 pagesProject Report PDFPradeep VermaNo ratings yet
- GMK4100L 1 PDFDocument340 pagesGMK4100L 1 PDFJesant Tejsal100% (1)
- Avaliação Mecanico 1 (Ingles)Document13 pagesAvaliação Mecanico 1 (Ingles)Júlia Campos100% (1)
- Adaptive Control Strategy of Climbing Robot For Inspection Applications in Construction IndustryDocument6 pagesAdaptive Control Strategy of Climbing Robot For Inspection Applications in Construction IndustryVishal PatilNo ratings yet
- Practical, Made Easy Guide To Robotics & Automation [Revised Edition]From EverandPractical, Made Easy Guide To Robotics & Automation [Revised Edition]Rating: 1 out of 5 stars1/5 (1)
- Final Year B.tech-Robotics Lab ManualDocument37 pagesFinal Year B.tech-Robotics Lab ManualHIRSHITHA RAJEENo ratings yet
- ESME Tadele B. Tuli and Tesfaye O. TerefeDocument9 pagesESME Tadele B. Tuli and Tesfaye O. TerefeTesfayeNo ratings yet
- Design of Inspection and Cleaning RobotDocument6 pagesDesign of Inspection and Cleaning RobotGR Techno SolutionsNo ratings yet
- Mobile Industrial Robots-WikipediaDocument4 pagesMobile Industrial Robots-WikipediastanimirNo ratings yet
- Mopping Module Design and Experiments of A Multifunction Floor Cleaning RobotDocument6 pagesMopping Module Design and Experiments of A Multifunction Floor Cleaning RobotAntonio MoisesNo ratings yet
- Design of A Configurable All Terrain Mobile Robot Platform-1Document8 pagesDesign of A Configurable All Terrain Mobile Robot Platform-1Krupal PatelNo ratings yet
- Unit 1Document100 pagesUnit 1apakkiNo ratings yet
- Industrial RobotsDocument32 pagesIndustrial Robotsclaudiu feier50% (2)
- Ch1 Introduction, Joints, ConfigurationsDocument12 pagesCh1 Introduction, Joints, ConfigurationsMelkamu SimenehNo ratings yet
- Different Usages of RobotsDocument15 pagesDifferent Usages of RobotsOmar ZareefNo ratings yet
- Design and Analysis of An Articulated Robot Arm For Various Industrial ApplicationsDocument12 pagesDesign and Analysis of An Articulated Robot Arm For Various Industrial Applicationsاقْرَأْ وَرَبُّكَ الْأَكْرَمُNo ratings yet
- Ch-01. Introduction To Industrial RobotDocument28 pagesCh-01. Introduction To Industrial Robotking0o0.652No ratings yet
- Chapter3-Introduction To RoboticDocument73 pagesChapter3-Introduction To RoboticAbdul RazziNo ratings yet
- Module 1Document6 pagesModule 1N BHUSHANNo ratings yet
- Unit I INTRODUCTION AND ROBOT KINEMATICSDocument11 pagesUnit I INTRODUCTION AND ROBOT KINEMATICShicet mechhodNo ratings yet
- Pneumatic Wall Climbing Robot PDFDocument4 pagesPneumatic Wall Climbing Robot PDFRavi tejaNo ratings yet
- Stair Case Cleaning Robot: Design Considerations and A Case StudyDocument5 pagesStair Case Cleaning Robot: Design Considerations and A Case StudyRohith RaviNo ratings yet
- RoboticsDocument214 pagesRoboticsGirish WaghNo ratings yet
- 2018 ChapterDocument20 pages2018 ChapterRagini SinghNo ratings yet
- Robotics: Classification of Robots Based On Their ConfigurationDocument7 pagesRobotics: Classification of Robots Based On Their ConfigurationBharath Narasimha100% (1)
- Robotics 1Document11 pagesRobotics 1Jagdish KanakiNo ratings yet
- Robots and Their Applications: © The Author(s) 2018 1 M. Ben-Ari and F. Mondada, Elements of 62533-1 - 1Document20 pagesRobots and Their Applications: © The Author(s) 2018 1 M. Ben-Ari and F. Mondada, Elements of 62533-1 - 1mohammed meladNo ratings yet
- ELX 321 MODULE 1 Introduction To RoboticsDocument13 pagesELX 321 MODULE 1 Introduction To RoboticsButs ButitoyNo ratings yet
- Name: P.Jyothi Branch: Bio-Medical Engineering Institute: Govt. Institute of Electronics Subject: RoboticsDocument34 pagesName: P.Jyothi Branch: Bio-Medical Engineering Institute: Govt. Institute of Electronics Subject: RoboticsananthNo ratings yet
- CH 1-OverviewDocument58 pagesCH 1-OverviewMohamed AbdullahiNo ratings yet
- Fundamentals of Robotics: Brief HistoryDocument10 pagesFundamentals of Robotics: Brief HistorymikeemackNo ratings yet
- Design, Simulations and Optimization of A Tracked Mobile Robot Manipulator With Hybrid Locomotion and Manipulation CapabilitiesDocument6 pagesDesign, Simulations and Optimization of A Tracked Mobile Robot Manipulator With Hybrid Locomotion and Manipulation CapabilitiesIbrahim Ishaq KishimiNo ratings yet
- Module 6 - Industrial ApplicationsDocument34 pagesModule 6 - Industrial ApplicationsSai Devaraju V SNo ratings yet
- Wall CleanerDocument5 pagesWall CleanerNaitik JainNo ratings yet
- Industrial RobotsDocument88 pagesIndustrial Robotsdtuc100% (2)
- Different Levels of Complexity in Tasks For Robots: Technology Industrial Automation Industrial Robots ManufacturingDocument11 pagesDifferent Levels of Complexity in Tasks For Robots: Technology Industrial Automation Industrial Robots ManufacturingarunimajoyNo ratings yet
- Answer Key It-2 CseDocument9 pagesAnswer Key It-2 CseVenkadeshNo ratings yet
- Cad Cam Cim Pages 488 520Document33 pagesCad Cam Cim Pages 488 520Luis David SanchezNo ratings yet
- Literature Review UpdateDocument14 pagesLiterature Review Updatetlili mohamed aliNo ratings yet
- Industrial RobotsDocument15 pagesIndustrial RobotsLW LuWee ChongNo ratings yet
- IntroductionDocument25 pagesIntroductionplayerzpot unlimitedNo ratings yet
- Aa RaiDocument12 pagesAa RaiAshutosh AvasekarNo ratings yet
- Robotics and Automations Material - M - Vinoth KumarDocument63 pagesRobotics and Automations Material - M - Vinoth Kumartumati venkata vinayNo ratings yet
- Autonomous Vacuum CleanerDocument16 pagesAutonomous Vacuum CleanerNiña Clare Magallon UyNo ratings yet
- Unit - I Lecture Notes PDFDocument12 pagesUnit - I Lecture Notes PDFCody LeeNo ratings yet
- Rai (PJ)Document12 pagesRai (PJ)Ashutosh AvasekarNo ratings yet
- Robotics PDFDocument60 pagesRobotics PDFSiri AggarapuNo ratings yet
- P&P Report PDFDocument10 pagesP&P Report PDFJûstîn TiwariNo ratings yet
- Chapter One: Pneumatic Assempling Robotic ArmDocument13 pagesChapter One: Pneumatic Assempling Robotic ArmMahmoud AbdulAzizNo ratings yet
- Abstract Tech PaperDocument14 pagesAbstract Tech PaperAdityaSharmaNo ratings yet
- سفاريDocument10 pagesسفاريhawrasdqNo ratings yet
- BRE 501 Industrial RoboticsDocument26 pagesBRE 501 Industrial RoboticsakshaysinghNo ratings yet
- Unit-I: Robotics and Automation. This Includes "Dumb" Ro Woodworking Machines, "Intelligent" WashingDocument27 pagesUnit-I: Robotics and Automation. This Includes "Dumb" Ro Woodworking Machines, "Intelligent" Washinglakshmigsr6610No ratings yet
- Robotics and Machine Vision SystemDocument55 pagesRobotics and Machine Vision Systemசெல்வம் முத்துராமன்No ratings yet
- AUTOMATIC and MANUAL VACUUM CLEANING ROBDocument3 pagesAUTOMATIC and MANUAL VACUUM CLEANING ROBSirajus Salekin [Id:37]No ratings yet
- Lab Part 03 Homework 01Document12 pagesLab Part 03 Homework 01ឆាម វ៉ាន់នូវNo ratings yet
- UNIT I RoboticsDocument12 pagesUNIT I RoboticsJatinNo ratings yet
- Industrial Automation System WORKSHOP - 085832Document8 pagesIndustrial Automation System WORKSHOP - 085832cardozogonzalezerikaNo ratings yet
- Robotics Fundamentals-MTEDocument67 pagesRobotics Fundamentals-MTETahammul Islam IbonNo ratings yet
- 16 Robotics Visions Warm Intelligence Traffic SafetyDocument9 pages16 Robotics Visions Warm Intelligence Traffic SafetygeethroseNo ratings yet
- Unit 1Document5 pagesUnit 1N Dhanunjaya Rao BorraNo ratings yet
- The Age of Machines: A Comprehensive Overview of Robotics and Automation Technology"From EverandThe Age of Machines: A Comprehensive Overview of Robotics and Automation Technology"No ratings yet
- Recap: Lecture 5: - Velocity Components and Nomenclature - Velocity TrianglesDocument16 pagesRecap: Lecture 5: - Velocity Components and Nomenclature - Velocity TriangleslavaNo ratings yet
- Turbocharging: Shubham Patel 130040119085 6 Mech-M2Document15 pagesTurbocharging: Shubham Patel 130040119085 6 Mech-M2Mohammad Al QadomeNo ratings yet
- 4 Stroke EngineDocument6 pages4 Stroke Engineasra 10100% (2)
- Skills Standards: Heavy Equipment Maintenance: Heavy Equipment MechanicDocument17 pagesSkills Standards: Heavy Equipment Maintenance: Heavy Equipment MechanicRohit Om TiwariNo ratings yet
- ENERGY STAR Most Efficient 2020 - Central Air Conditioners and Air Source Heat Pumps - Products - ENERGY STARDocument51 pagesENERGY STAR Most Efficient 2020 - Central Air Conditioners and Air Source Heat Pumps - Products - ENERGY STARRicardo Chegwin HillembrandNo ratings yet
- W211 SBC Brake Disable - Enable Without Star DiagnosisDocument3 pagesW211 SBC Brake Disable - Enable Without Star DiagnosisDreambear80% (5)
- GTH 6025 Service ManualDocument282 pagesGTH 6025 Service ManualDraganMihajlov100% (1)
- Carrier Split Type Aircon ManualDocument14 pagesCarrier Split Type Aircon ManualRizal TingNo ratings yet
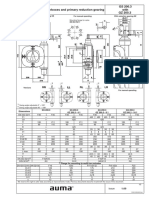
- GS 200.3 With GZ 200.3 Dimensions Worm Gearboxes and Primary Reduction GearingDocument2 pagesGS 200.3 With GZ 200.3 Dimensions Worm Gearboxes and Primary Reduction GearingDinesh ChouguleNo ratings yet
- SymbolsDocument34 pagesSymbolsjoejex123No ratings yet
- Stepper MotorDocument15 pagesStepper MotorViral Thakkar100% (2)
- Motor S-50 Ddec-Iv PDFDocument1 pageMotor S-50 Ddec-Iv PDFeduardonemoNo ratings yet
- Triton Workcentre 2000Document28 pagesTriton Workcentre 2000MiraNo ratings yet
- Yukon 6.2Document8 pagesYukon 6.2Dany AlvaradoNo ratings yet
- Setting Up Hydraulic/pneumatic Clutch ActuatorDocument5 pagesSetting Up Hydraulic/pneumatic Clutch ActuatorCristian RoşianuNo ratings yet
- 42V IsgDocument10 pages42V IsgSudarsan KumarNo ratings yet
- Ryobi Pex Clamp Tool P660 - 438 - R - 02Document4 pagesRyobi Pex Clamp Tool P660 - 438 - R - 02digitaltextNo ratings yet
- GE Constant Airflow ECMDocument33 pagesGE Constant Airflow ECMalawi747594No ratings yet
- CV Ipan PurnamaDocument7 pagesCV Ipan PurnamaIsaalexNo ratings yet
- Format - New Item CodesDocument20 pagesFormat - New Item CodesValipireddy NagarjunNo ratings yet
- Electronic Diesel Control (EDC) : System OverviewDocument2 pagesElectronic Diesel Control (EDC) : System OverviewRajni Devi100% (1)
- Finisher SR3210 (D3B8) Parts CatalogDocument63 pagesFinisher SR3210 (D3B8) Parts Catalogwilliam lozadaNo ratings yet
- GEA Cairplus DatasheetDocument2 pagesGEA Cairplus Datasheetlajharka50% (2)






![Practical, Made Easy Guide To Robotics & Automation [Revised Edition]](https://imgv2-1-f.scribdassets.com/img/word_document/253466853/149x198/4281882d40/1709916831?v=1)
















































































Download as pdf or txt
You might also like
- Fault Code 324 Injector Solenoid Driver Cylinder 3 Circuit - Current Below Normal, or Open CircuitDocument26 pagesFault Code 324 Injector Solenoid Driver Cylinder 3 Circuit - Current Below Normal, or Open CircuitAhmedmahNo ratings yet
- Ft4 Gas Turbine Installation HadbookDocument3 pagesFt4 Gas Turbine Installation HadbookGabriela Sanchez100% (3)
- Massenza Mi4 Manual PDFDocument44 pagesMassenza Mi4 Manual PDFsean100% (2)
- Chapter 5 Deutz EMR 2 Fault Codes NewDocument8 pagesChapter 5 Deutz EMR 2 Fault Codes NewLhsan RajawiNo ratings yet
- Project Report PDFDocument4 pagesProject Report PDFPradeep VermaNo ratings yet
- GMK4100L 1 PDFDocument340 pagesGMK4100L 1 PDFJesant Tejsal100% (1)
- Avaliação Mecanico 1 (Ingles)Document13 pagesAvaliação Mecanico 1 (Ingles)Júlia Campos100% (1)
- Adaptive Control Strategy of Climbing Robot For Inspection Applications in Construction IndustryDocument6 pagesAdaptive Control Strategy of Climbing Robot For Inspection Applications in Construction IndustryVishal PatilNo ratings yet
- Practical, Made Easy Guide To Robotics & Automation [Revised Edition]From EverandPractical, Made Easy Guide To Robotics & Automation [Revised Edition]Rating: 1 out of 5 stars1/5 (1)
- Final Year B.tech-Robotics Lab ManualDocument37 pagesFinal Year B.tech-Robotics Lab ManualHIRSHITHA RAJEENo ratings yet
- ESME Tadele B. Tuli and Tesfaye O. TerefeDocument9 pagesESME Tadele B. Tuli and Tesfaye O. TerefeTesfayeNo ratings yet
- Design of Inspection and Cleaning RobotDocument6 pagesDesign of Inspection and Cleaning RobotGR Techno SolutionsNo ratings yet
- Mobile Industrial Robots-WikipediaDocument4 pagesMobile Industrial Robots-WikipediastanimirNo ratings yet
- Mopping Module Design and Experiments of A Multifunction Floor Cleaning RobotDocument6 pagesMopping Module Design and Experiments of A Multifunction Floor Cleaning RobotAntonio MoisesNo ratings yet
- Design of A Configurable All Terrain Mobile Robot Platform-1Document8 pagesDesign of A Configurable All Terrain Mobile Robot Platform-1Krupal PatelNo ratings yet
- Unit 1Document100 pagesUnit 1apakkiNo ratings yet
- Industrial RobotsDocument32 pagesIndustrial Robotsclaudiu feier50% (2)
- Ch1 Introduction, Joints, ConfigurationsDocument12 pagesCh1 Introduction, Joints, ConfigurationsMelkamu SimenehNo ratings yet
- Different Usages of RobotsDocument15 pagesDifferent Usages of RobotsOmar ZareefNo ratings yet
- Design and Analysis of An Articulated Robot Arm For Various Industrial ApplicationsDocument12 pagesDesign and Analysis of An Articulated Robot Arm For Various Industrial Applicationsاقْرَأْ وَرَبُّكَ الْأَكْرَمُNo ratings yet
- Ch-01. Introduction To Industrial RobotDocument28 pagesCh-01. Introduction To Industrial Robotking0o0.652No ratings yet
- Chapter3-Introduction To RoboticDocument73 pagesChapter3-Introduction To RoboticAbdul RazziNo ratings yet
- Module 1Document6 pagesModule 1N BHUSHANNo ratings yet
- Unit I INTRODUCTION AND ROBOT KINEMATICSDocument11 pagesUnit I INTRODUCTION AND ROBOT KINEMATICShicet mechhodNo ratings yet
- Pneumatic Wall Climbing Robot PDFDocument4 pagesPneumatic Wall Climbing Robot PDFRavi tejaNo ratings yet
- Stair Case Cleaning Robot: Design Considerations and A Case StudyDocument5 pagesStair Case Cleaning Robot: Design Considerations and A Case StudyRohith RaviNo ratings yet
- RoboticsDocument214 pagesRoboticsGirish WaghNo ratings yet
- 2018 ChapterDocument20 pages2018 ChapterRagini SinghNo ratings yet
- Robotics: Classification of Robots Based On Their ConfigurationDocument7 pagesRobotics: Classification of Robots Based On Their ConfigurationBharath Narasimha100% (1)
- Robotics 1Document11 pagesRobotics 1Jagdish KanakiNo ratings yet
- Robots and Their Applications: © The Author(s) 2018 1 M. Ben-Ari and F. Mondada, Elements of 62533-1 - 1Document20 pagesRobots and Their Applications: © The Author(s) 2018 1 M. Ben-Ari and F. Mondada, Elements of 62533-1 - 1mohammed meladNo ratings yet
- ELX 321 MODULE 1 Introduction To RoboticsDocument13 pagesELX 321 MODULE 1 Introduction To RoboticsButs ButitoyNo ratings yet
- Name: P.Jyothi Branch: Bio-Medical Engineering Institute: Govt. Institute of Electronics Subject: RoboticsDocument34 pagesName: P.Jyothi Branch: Bio-Medical Engineering Institute: Govt. Institute of Electronics Subject: RoboticsananthNo ratings yet
- CH 1-OverviewDocument58 pagesCH 1-OverviewMohamed AbdullahiNo ratings yet
- Fundamentals of Robotics: Brief HistoryDocument10 pagesFundamentals of Robotics: Brief HistorymikeemackNo ratings yet
- Design, Simulations and Optimization of A Tracked Mobile Robot Manipulator With Hybrid Locomotion and Manipulation CapabilitiesDocument6 pagesDesign, Simulations and Optimization of A Tracked Mobile Robot Manipulator With Hybrid Locomotion and Manipulation CapabilitiesIbrahim Ishaq KishimiNo ratings yet
- Module 6 - Industrial ApplicationsDocument34 pagesModule 6 - Industrial ApplicationsSai Devaraju V SNo ratings yet
- Wall CleanerDocument5 pagesWall CleanerNaitik JainNo ratings yet
- Industrial RobotsDocument88 pagesIndustrial Robotsdtuc100% (2)
- Different Levels of Complexity in Tasks For Robots: Technology Industrial Automation Industrial Robots ManufacturingDocument11 pagesDifferent Levels of Complexity in Tasks For Robots: Technology Industrial Automation Industrial Robots ManufacturingarunimajoyNo ratings yet
- Answer Key It-2 CseDocument9 pagesAnswer Key It-2 CseVenkadeshNo ratings yet
- Cad Cam Cim Pages 488 520Document33 pagesCad Cam Cim Pages 488 520Luis David SanchezNo ratings yet
- Literature Review UpdateDocument14 pagesLiterature Review Updatetlili mohamed aliNo ratings yet
- Industrial RobotsDocument15 pagesIndustrial RobotsLW LuWee ChongNo ratings yet
- IntroductionDocument25 pagesIntroductionplayerzpot unlimitedNo ratings yet
- Aa RaiDocument12 pagesAa RaiAshutosh AvasekarNo ratings yet
- Robotics and Automations Material - M - Vinoth KumarDocument63 pagesRobotics and Automations Material - M - Vinoth Kumartumati venkata vinayNo ratings yet
- Autonomous Vacuum CleanerDocument16 pagesAutonomous Vacuum CleanerNiña Clare Magallon UyNo ratings yet
- Unit - I Lecture Notes PDFDocument12 pagesUnit - I Lecture Notes PDFCody LeeNo ratings yet
- Rai (PJ)Document12 pagesRai (PJ)Ashutosh AvasekarNo ratings yet
- Robotics PDFDocument60 pagesRobotics PDFSiri AggarapuNo ratings yet
- P&P Report PDFDocument10 pagesP&P Report PDFJûstîn TiwariNo ratings yet
- Chapter One: Pneumatic Assempling Robotic ArmDocument13 pagesChapter One: Pneumatic Assempling Robotic ArmMahmoud AbdulAzizNo ratings yet
- Abstract Tech PaperDocument14 pagesAbstract Tech PaperAdityaSharmaNo ratings yet
- سفاريDocument10 pagesسفاريhawrasdqNo ratings yet
- BRE 501 Industrial RoboticsDocument26 pagesBRE 501 Industrial RoboticsakshaysinghNo ratings yet
- Unit-I: Robotics and Automation. This Includes "Dumb" Ro Woodworking Machines, "Intelligent" WashingDocument27 pagesUnit-I: Robotics and Automation. This Includes "Dumb" Ro Woodworking Machines, "Intelligent" Washinglakshmigsr6610No ratings yet
- Robotics and Machine Vision SystemDocument55 pagesRobotics and Machine Vision Systemசெல்வம் முத்துராமன்No ratings yet
- AUTOMATIC and MANUAL VACUUM CLEANING ROBDocument3 pagesAUTOMATIC and MANUAL VACUUM CLEANING ROBSirajus Salekin [Id:37]No ratings yet
- Lab Part 03 Homework 01Document12 pagesLab Part 03 Homework 01ឆាម វ៉ាន់នូវNo ratings yet
- UNIT I RoboticsDocument12 pagesUNIT I RoboticsJatinNo ratings yet
- Industrial Automation System WORKSHOP - 085832Document8 pagesIndustrial Automation System WORKSHOP - 085832cardozogonzalezerikaNo ratings yet
- Robotics Fundamentals-MTEDocument67 pagesRobotics Fundamentals-MTETahammul Islam IbonNo ratings yet
- 16 Robotics Visions Warm Intelligence Traffic SafetyDocument9 pages16 Robotics Visions Warm Intelligence Traffic SafetygeethroseNo ratings yet
- Unit 1Document5 pagesUnit 1N Dhanunjaya Rao BorraNo ratings yet
- The Age of Machines: A Comprehensive Overview of Robotics and Automation Technology"From EverandThe Age of Machines: A Comprehensive Overview of Robotics and Automation Technology"No ratings yet
- Recap: Lecture 5: - Velocity Components and Nomenclature - Velocity TrianglesDocument16 pagesRecap: Lecture 5: - Velocity Components and Nomenclature - Velocity TriangleslavaNo ratings yet
- Turbocharging: Shubham Patel 130040119085 6 Mech-M2Document15 pagesTurbocharging: Shubham Patel 130040119085 6 Mech-M2Mohammad Al QadomeNo ratings yet
- 4 Stroke EngineDocument6 pages4 Stroke Engineasra 10100% (2)
- Skills Standards: Heavy Equipment Maintenance: Heavy Equipment MechanicDocument17 pagesSkills Standards: Heavy Equipment Maintenance: Heavy Equipment MechanicRohit Om TiwariNo ratings yet
- ENERGY STAR Most Efficient 2020 - Central Air Conditioners and Air Source Heat Pumps - Products - ENERGY STARDocument51 pagesENERGY STAR Most Efficient 2020 - Central Air Conditioners and Air Source Heat Pumps - Products - ENERGY STARRicardo Chegwin HillembrandNo ratings yet
- W211 SBC Brake Disable - Enable Without Star DiagnosisDocument3 pagesW211 SBC Brake Disable - Enable Without Star DiagnosisDreambear80% (5)
- GTH 6025 Service ManualDocument282 pagesGTH 6025 Service ManualDraganMihajlov100% (1)
- Carrier Split Type Aircon ManualDocument14 pagesCarrier Split Type Aircon ManualRizal TingNo ratings yet
- GS 200.3 With GZ 200.3 Dimensions Worm Gearboxes and Primary Reduction GearingDocument2 pagesGS 200.3 With GZ 200.3 Dimensions Worm Gearboxes and Primary Reduction GearingDinesh ChouguleNo ratings yet
- SymbolsDocument34 pagesSymbolsjoejex123No ratings yet
- Stepper MotorDocument15 pagesStepper MotorViral Thakkar100% (2)
- Motor S-50 Ddec-Iv PDFDocument1 pageMotor S-50 Ddec-Iv PDFeduardonemoNo ratings yet
- Triton Workcentre 2000Document28 pagesTriton Workcentre 2000MiraNo ratings yet
- Yukon 6.2Document8 pagesYukon 6.2Dany AlvaradoNo ratings yet
- Setting Up Hydraulic/pneumatic Clutch ActuatorDocument5 pagesSetting Up Hydraulic/pneumatic Clutch ActuatorCristian RoşianuNo ratings yet
- 42V IsgDocument10 pages42V IsgSudarsan KumarNo ratings yet
- Ryobi Pex Clamp Tool P660 - 438 - R - 02Document4 pagesRyobi Pex Clamp Tool P660 - 438 - R - 02digitaltextNo ratings yet
- GE Constant Airflow ECMDocument33 pagesGE Constant Airflow ECMalawi747594No ratings yet
- CV Ipan PurnamaDocument7 pagesCV Ipan PurnamaIsaalexNo ratings yet
- Format - New Item CodesDocument20 pagesFormat - New Item CodesValipireddy NagarjunNo ratings yet
- Electronic Diesel Control (EDC) : System OverviewDocument2 pagesElectronic Diesel Control (EDC) : System OverviewRajni Devi100% (1)
- Finisher SR3210 (D3B8) Parts CatalogDocument63 pagesFinisher SR3210 (D3B8) Parts Catalogwilliam lozadaNo ratings yet
- GEA Cairplus DatasheetDocument2 pagesGEA Cairplus Datasheetlajharka50% (2)