Download as pdf or txt
You might also like
- Safebuck III Rev C 2015Document237 pagesSafebuck III Rev C 2015Cescyle Costa100% (1)
- 1929 MONONOBE On The Determination of Earth Pressure During EartquakesDocument9 pages1929 MONONOBE On The Determination of Earth Pressure During EartquakesEugenio DurbanNo ratings yet
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Torsion Testing ExperimentDocument11 pagesTorsion Testing ExperimentAnoj pahathkumburaNo ratings yet
- Ajedreceando IDocument92 pagesAjedreceando Iromina CuevasNo ratings yet
- (Tugas 1) - Muhammad Luthfi - 2306291415Document7 pages(Tugas 1) - Muhammad Luthfi - 2306291415Joshua SitorusNo ratings yet
- Emission Test ReportDocument3 pagesEmission Test ReportFaruk HasanNo ratings yet
- 400Document3 pages400Hamid NiazmandNo ratings yet
- QC HW2Document4 pagesQC HW2Julie WangNo ratings yet
- Gargallo Dibujos-IDocument260 pagesGargallo Dibujos-IMarisa Carreras AbeniaNo ratings yet
- T) 1ect: Vyrm Fy1Document3 pagesT) 1ect: Vyrm Fy1Ichal ZuhdyNo ratings yet
- Megnadbodh Kabya by Rabindranath TagoreDocument5 pagesMegnadbodh Kabya by Rabindranath TagoreNasim MondalNo ratings yet
- Ultrasonic Testing of Materials 133Document1 pageUltrasonic Testing of Materials 133joNo ratings yet
- Khi-Cu-Dien - Nguyen-Van-Anh - Video - (Cuuduongthancong - Com)Document3 pagesKhi-Cu-Dien - Nguyen-Van-Anh - Video - (Cuuduongthancong - Com)Nu LeNo ratings yet
- Quiz 1Document6 pagesQuiz 1SilverNo ratings yet
- I T TT: S.oat TSLLKRDocument2 pagesI T TT: S.oat TSLLKRsafety pt pcsNo ratings yet
- 4 - Simplification MethodDocument46 pages4 - Simplification MethodMohamed KaramNo ratings yet
- Documents - Pub - Cable Selection 56d7244c2ce49Document101 pagesDocuments - Pub - Cable Selection 56d7244c2ce49Kemal SümbülNo ratings yet
- Shivananda Lahari Ananda Lahari in TELUGUDocument14 pagesShivananda Lahari Ananda Lahari in TELUGUbose123456No ratings yet
- Adiartech Load Cell 2T 20210Document2 pagesAdiartech Load Cell 2T 20210shrawan0908No ratings yet
- Eduardo Garcia Maynez - Introducción A La Lógica Jurídica (1951)Document128 pagesEduardo Garcia Maynez - Introducción A La Lógica Jurídica (1951)Santiago Maldonado Aquino100% (1)
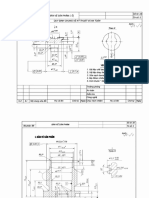
- B ( Phefin: BB: Ban Ve San Pham: L Õi Quy D/NH Chung V Ky Thuat Va An Toan TheokDocument3 pagesB ( Phefin: BB: Ban Ve San Pham: L Õi Quy D/NH Chung V Ky Thuat Va An Toan TheokLong NguyenNo ratings yet
- SA9083 Robin Tester MK 18 Book OriginalDocument16 pagesSA9083 Robin Tester MK 18 Book OriginalDLTNo ratings yet
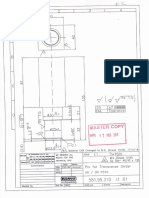
- 581.95.310 I1 r1 Pin For Transvers GirderDocument1 page581.95.310 I1 r1 Pin For Transvers GirderRakesh YadavNo ratings yet
- Type MCC: ConstructionDocument6 pagesType MCC: ConstructionHari Sita RukminiNo ratings yet
- Datasheet PDFDocument15 pagesDatasheet PDFMauricio BurgosNo ratings yet
- Analysis and Simulation of Signal Filters: X(S) As+B Y(s) S S+CS+DDocument31 pagesAnalysis and Simulation of Signal Filters: X(S) As+B Y(s) S S+CS+DFelix Pinto MacedoNo ratings yet
- Solution: A 160 200 B 300 C 100 D 140 E 160Document2 pagesSolution: A 160 200 B 300 C 100 D 140 E 160A.Kh.SNo ratings yet
- BEEE Lab Manual - BT104 - Readings - 1625301921Document8 pagesBEEE Lab Manual - BT104 - Readings - 1625301921sid mankarNo ratings yet
- WWW WWW WWW WWW: CitatuneDocument6 pagesWWW WWW WWW WWW: CitatuneRudi HariantoNo ratings yet
- Water Level Using CounterDocument7 pagesWater Level Using CounterSaleem AshrafNo ratings yet
- Cont Ohi NST R Uksirunt Unmenggunakanmat Lab: Nama:Nurjannah Ni M:180120114 Kelas:A3 Mk:Logi Kapemograman+PraktekDocument4 pagesCont Ohi NST R Uksirunt Unmenggunakanmat Lab: Nama:Nurjannah Ni M:180120114 Kelas:A3 Mk:Logi Kapemograman+PraktekAlvin DavinsaNo ratings yet
- Einv - VSL-SUP-01 - 31-05-2021 - Foundation BoltsDocument3 pagesEinv - VSL-SUP-01 - 31-05-2021 - Foundation BoltsVaibhav ShahNo ratings yet
- Low Voltage Doccii-Based Biquad Filter: Issa Eldbib, Ayad ShehabDocument5 pagesLow Voltage Doccii-Based Biquad Filter: Issa Eldbib, Ayad ShehabtritranNo ratings yet
- PBX Dizit Translation Tabie: Office Data Lotpbx (1 /1) EDocument6 pagesPBX Dizit Translation Tabie: Office Data Lotpbx (1 /1) Ersingh2020No ratings yet
- Pc2 Excel FinitosDocument8 pagesPc2 Excel FinitosAntony MarinNo ratings yet
- Circuit Analysis and Electronics Laboratory Calvin College: 22 April 2010Document11 pagesCircuit Analysis and Electronics Laboratory Calvin College: 22 April 2010beb5No ratings yet
- (Silicon) : N Channel Junction Field Effect TransistorsDocument2 pages(Silicon) : N Channel Junction Field Effect TransistorsFreddy Muñoz RiffoNo ratings yet
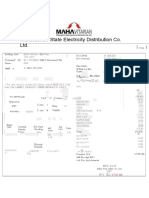
- Maharashtra State Co.: Electricity Distribution LTDDocument1 pageMaharashtra State Co.: Electricity Distribution LTDSamay GadaNo ratings yet
- PE-DC-402-510-E004 R01 - Signed GRPDocument20 pagesPE-DC-402-510-E004 R01 - Signed GRPDarwin AlphonseNo ratings yet
- Vintage Stereo Catalog 1977Document192 pagesVintage Stereo Catalog 1977jdap2000-1100% (2)
- Metodo de Elementos Fnitos Aplicados A La Ingnieria EstructuralDocument10 pagesMetodo de Elementos Fnitos Aplicados A La Ingnieria EstructuralDaniel MendozaNo ratings yet
- Winding Resistance Meter-1Document2 pagesWinding Resistance Meter-1SUBHA MONDALNo ratings yet
- Chemical Formulas Given Conditions Notations: I, J K, MDocument1 pageChemical Formulas Given Conditions Notations: I, J K, MscarlettNo ratings yet
- The KingDocument11 pagesThe KingsamahiashrifNo ratings yet
- LMTD Correction Factor ChartsDocument3 pagesLMTD Correction Factor ChartsMochammad ReshaNo ratings yet
- Lecture 5Document19 pagesLecture 5Atikom SombatmaiNo ratings yet
- Tablas Selectividad Filiacion EasyPact CVS Con Acti 9 y Multi 9Document17 pagesTablas Selectividad Filiacion EasyPact CVS Con Acti 9 y Multi 9Jesaias Josue Naal Matos100% (1)
- Adina Cracks PDFDocument45 pagesAdina Cracks PDFAdolfo Gálvez VillacortaNo ratings yet
- Namma Kalvi 12th Accountancy Chapter 6 Solutions TMDocument22 pagesNamma Kalvi 12th Accountancy Chapter 6 Solutions TMAakaash C.K.100% (1)
- Formulaire S2Document1 pageFormulaire S2Kadri RaniaNo ratings yet
- Experimental-Report-2 FixDocument6 pagesExperimental-Report-2 FixNguyễn Quốc HưngNo ratings yet
- KN3904SDocument3 pagesKN3904Saderlindo sátiroNo ratings yet
- Diagrama Cengel Apuntes Transferencia de CalorDocument4 pagesDiagrama Cengel Apuntes Transferencia de CalorJuanita López SánchezNo ratings yet
- Ada 284999Document30 pagesAda 284999john carterNo ratings yet
- CHE510 Lecture 12 2020 PDFDocument204 pagesCHE510 Lecture 12 2020 PDFNhi HoangNo ratings yet
- Plate ColumnsDocument3 pagesPlate ColumnsK SrikanthNo ratings yet
- Lampiran 1Document23 pagesLampiran 1Magical PetrichorNo ratings yet
- 5 Lições de Psicanalise - FREUD (1909)Document21 pages5 Lições de Psicanalise - FREUD (1909)Bianca NucheNo ratings yet
- TD Bank - PresentationDocument44 pagesTD Bank - PresentationTMCG2500No ratings yet
- Engine Manual Clearances 037Document8 pagesEngine Manual Clearances 037Edward KaranjaNo ratings yet
- NEM 428 M1 SolutionDocument7 pagesNEM 428 M1 Solutionnemo seydaNo ratings yet
- Adobe Scan Aug 31, 2022 PDFDocument8 pagesAdobe Scan Aug 31, 2022 PDFsteve njugunaNo ratings yet
- Bridge Design Manual: Washington State Department of TransportationDocument59 pagesBridge Design Manual: Washington State Department of TransportationMarco PlebaniNo ratings yet
- RC ReviewDocument9 pagesRC ReviewMarco PlebaniNo ratings yet
- View PublicationDocument17 pagesView PublicationMarco PlebaniNo ratings yet
- View PublicationDocument17 pagesView PublicationMarco PlebaniNo ratings yet
- View PublicationDocument16 pagesView PublicationMarco PlebaniNo ratings yet
- Local and Distortional BucklingDocument121 pagesLocal and Distortional BucklingMarco PlebaniNo ratings yet
- Galérie Des Machines by Ferdinand Dutert (246AR) - Atlas of Places PDFDocument23 pagesGalérie Des Machines by Ferdinand Dutert (246AR) - Atlas of Places PDFMarco PlebaniNo ratings yet
- 4.2.1. The City Square - Quadralectic Architecture PDFDocument13 pages4.2.1. The City Square - Quadralectic Architecture PDFMarco PlebaniNo ratings yet
- Huco Flex-M CouplingsDocument5 pagesHuco Flex-M CouplingsMahesh Daxini ThakkerNo ratings yet
- Cam DrawingDocument12 pagesCam DrawingПараг ТамбеNo ratings yet
- Seepage Flow Net FDMDocument68 pagesSeepage Flow Net FDMRenalyn AndradeNo ratings yet
- State Space Models, Linearization, Transfer Function: Automatic Control, Basic Course, Lecture 2Document40 pagesState Space Models, Linearization, Transfer Function: Automatic Control, Basic Course, Lecture 2Hassaan AhmedNo ratings yet
- Venturi MeterDocument15 pagesVenturi MeterFatimah BadruddinNo ratings yet
- This Study Resource Was: Transport PhenomenaDocument5 pagesThis Study Resource Was: Transport PhenomenaJoyce VicenteNo ratings yet
- 06 Motion in A Circle - Problem Set - SolutionDocument15 pages06 Motion in A Circle - Problem Set - SolutionBRANDON FANNNo ratings yet
- Assessment of Hydraulic and Structural Interactions For BridgesDocument9 pagesAssessment of Hydraulic and Structural Interactions For BridgesLuis Horacio Martínez MartínezNo ratings yet
- Huerre, Monkewitz - Absolute and Convective Instabilities in Free Shear Layers (1985)Document18 pagesHuerre, Monkewitz - Absolute and Convective Instabilities in Free Shear Layers (1985)Aryce_No ratings yet
- SmitWijn Ferrites TextDocument387 pagesSmitWijn Ferrites TextPatitoNo ratings yet
- Lecture1 Intro Dynamics AnnotatedDocument44 pagesLecture1 Intro Dynamics AnnotatedJoseph AndrewesNo ratings yet
- Anti Vortex MeasuresDocument7 pagesAnti Vortex MeasuressunnytouchNo ratings yet
- Analysis of Rigid Dynamic of A Spatial Slider-Crank Mechanism With Spherical Clearance Joints Using ANSYS Software Huynh Ngoc Thai, SHYH-CHOUR HUANGDocument5 pagesAnalysis of Rigid Dynamic of A Spatial Slider-Crank Mechanism With Spherical Clearance Joints Using ANSYS Software Huynh Ngoc Thai, SHYH-CHOUR HUANGThaiHuynhNgocNo ratings yet
- Grade 8 Science Matter Questions or ResearchDocument2 pagesGrade 8 Science Matter Questions or Researchleon08jayNo ratings yet
- Course Planner Class-Xi - Vipul (01Jb) Class-Xi - Vipul (01Jb)Document4 pagesCourse Planner Class-Xi - Vipul (01Jb) Class-Xi - Vipul (01Jb)Bharat KaseraNo ratings yet
- (Sergiu T. Chiriacescu (Eds.) ) Stability in The DyDocument204 pages(Sergiu T. Chiriacescu (Eds.) ) Stability in The DyHugo CostaNo ratings yet
- Laser WeldingDocument17 pagesLaser WeldingSaurabh GuptaNo ratings yet
- Petrowiki Pressure Drop EquationsDocument14 pagesPetrowiki Pressure Drop Equationsrasnowmah2012No ratings yet
- g485 5 1 2 Magnetic Fields BDocument10 pagesg485 5 1 2 Magnetic Fields Bapi-236179294No ratings yet
- Numerical Study of Oil Storage Tanks During Planar SettlementDocument10 pagesNumerical Study of Oil Storage Tanks During Planar SettlementBagus HadiwibowoNo ratings yet
- Dynamical Models For Omni-Directional Robots WithDocument8 pagesDynamical Models For Omni-Directional Robots WithGabriel Alejandro Francisco Gallardo TineoNo ratings yet
- FortiniSNOWANCHORS3B PDFDocument56 pagesFortiniSNOWANCHORS3B PDFPierre-Frederic VergeNo ratings yet
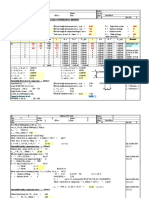
- Strap Footing DesignDocument5 pagesStrap Footing DesignNabin Acharya100% (1)
- Mechanical VibrationDocument10 pagesMechanical VibrationHafiz AhsanNo ratings yet
- SaclstDocument281 pagesSaclstanandakoeNo ratings yet
- Machines and Mechanisms - 2022Document164 pagesMachines and Mechanisms - 2022Ha LinhNo ratings yet
- Seismic Collapse Assessment of Steel Plate Shear Walls Considering TheDocument14 pagesSeismic Collapse Assessment of Steel Plate Shear Walls Considering TheArniNo ratings yet